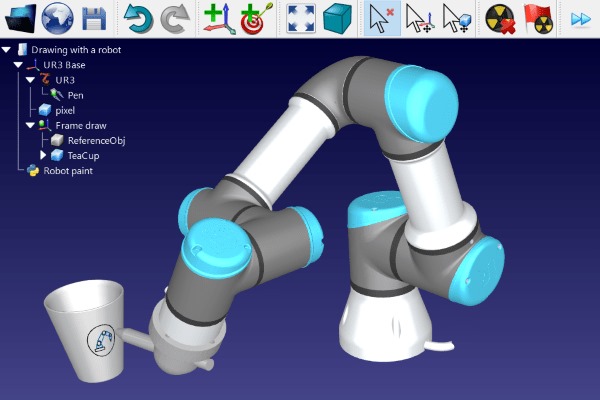
离线编程
工业机器人离线编程与仿真从未如此简单。 直观的用户界面,便于搭建虚拟工作环境,创建坐标系,设定机器人运动轨迹及目标,为多种工业应用预先进行离线编程。
您不再需要学习由各机器人品牌所决定的复杂编程语言。
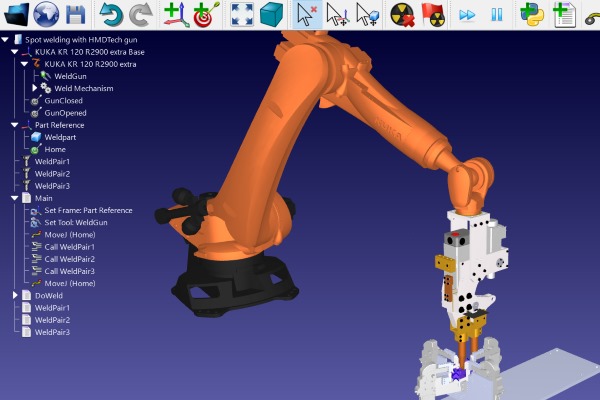
机器人加工
把您的机器人变成一台5轴数控铣削加工机床(CNC)或者3D打印机! 仿真并将数控程序(G-code,APT 或 DXF 等程序文件)转化为机器人程序文件。 RoboDK 将自动优化机器人轨迹,避免奇异状态(singularities)及轴极限,躲避障碍。
点击这里 告诉我们您想要实现的应用,我们可以帮助您在RoboDK 中搭建案例!

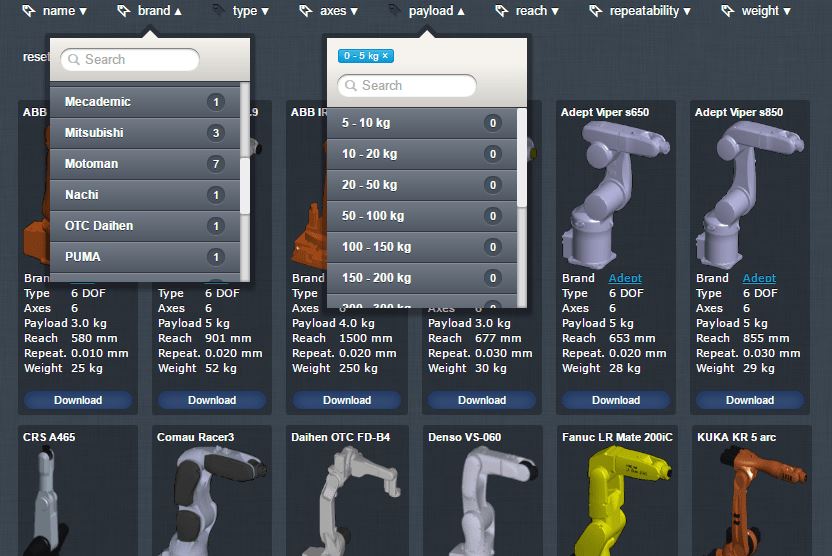
机器人模型库
RoboDK 的机器人模型库包含来自20多个品牌的工业机器人、机器人外轴以及工业工具。 您可以轻松使用任一款机器人,实现任何应用,包括:加工,焊接,切割,喷涂,检测,去毛刺,以及更多。
没有找到您使用的机器人? 点击这里 我们帮助您添加!

输出程序到您的机器人
RoboDK 的后处理器(Post Processors)支持多种机器人控制器,包括:
ABB RAPID (mod/prg)
Fanuc LS (LS/TP)
Kuka KRC/IIWA (SRC/java)
Motoman Inform (JBI)
Universal Robots (URP/script)
...以及更多!