取放
简单的拾取与放置仿真。
使用Python取放
这个范例演示了如何使用Python来实现取放
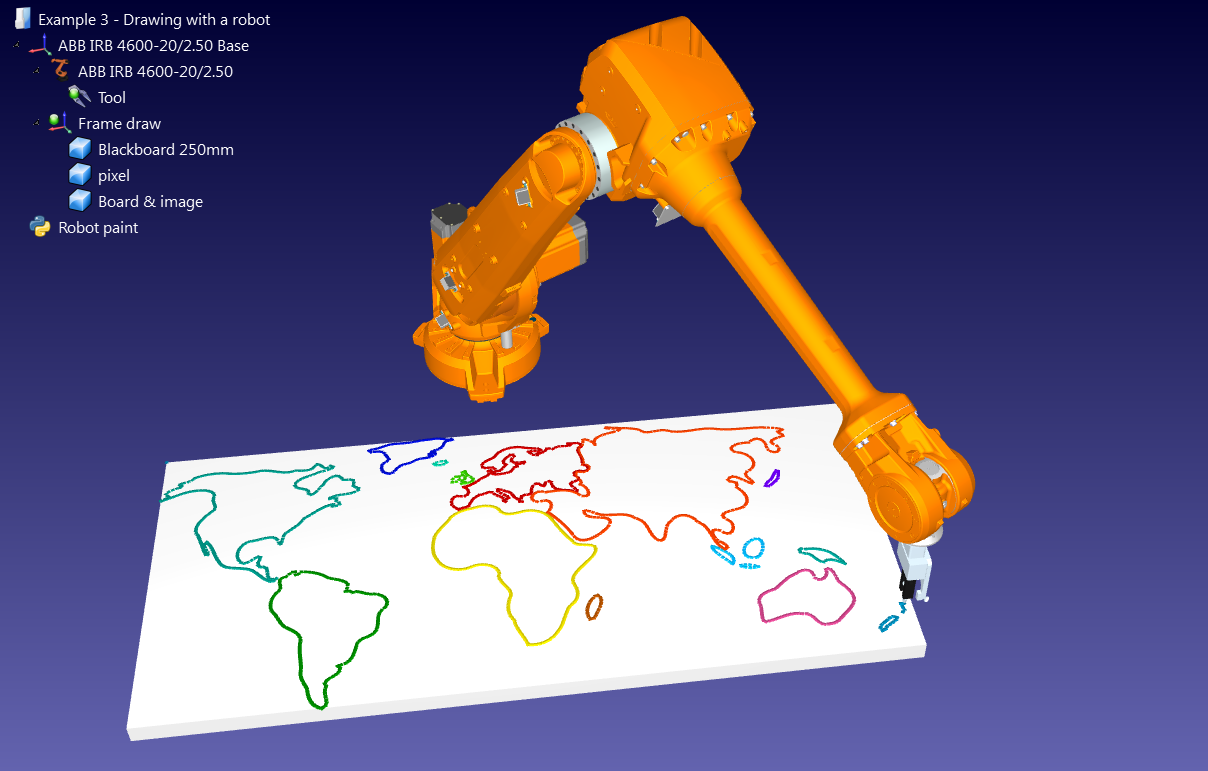
机器人绘图
用你的机器人仿真绘制SVG图像文件,在项目中使用来自第三方的Python库。
机器人铣削
把你的机器人变成CNC,轻松导入 NC-code (G-code 或 APT),生成机器人程序文件。
自动传送带
仿真机械传送带以及任何类似的机械装置,使用Python应用程序编程接口。
DXF到机器人程序文件
将DXF图形文件转化成机器人程序文件。
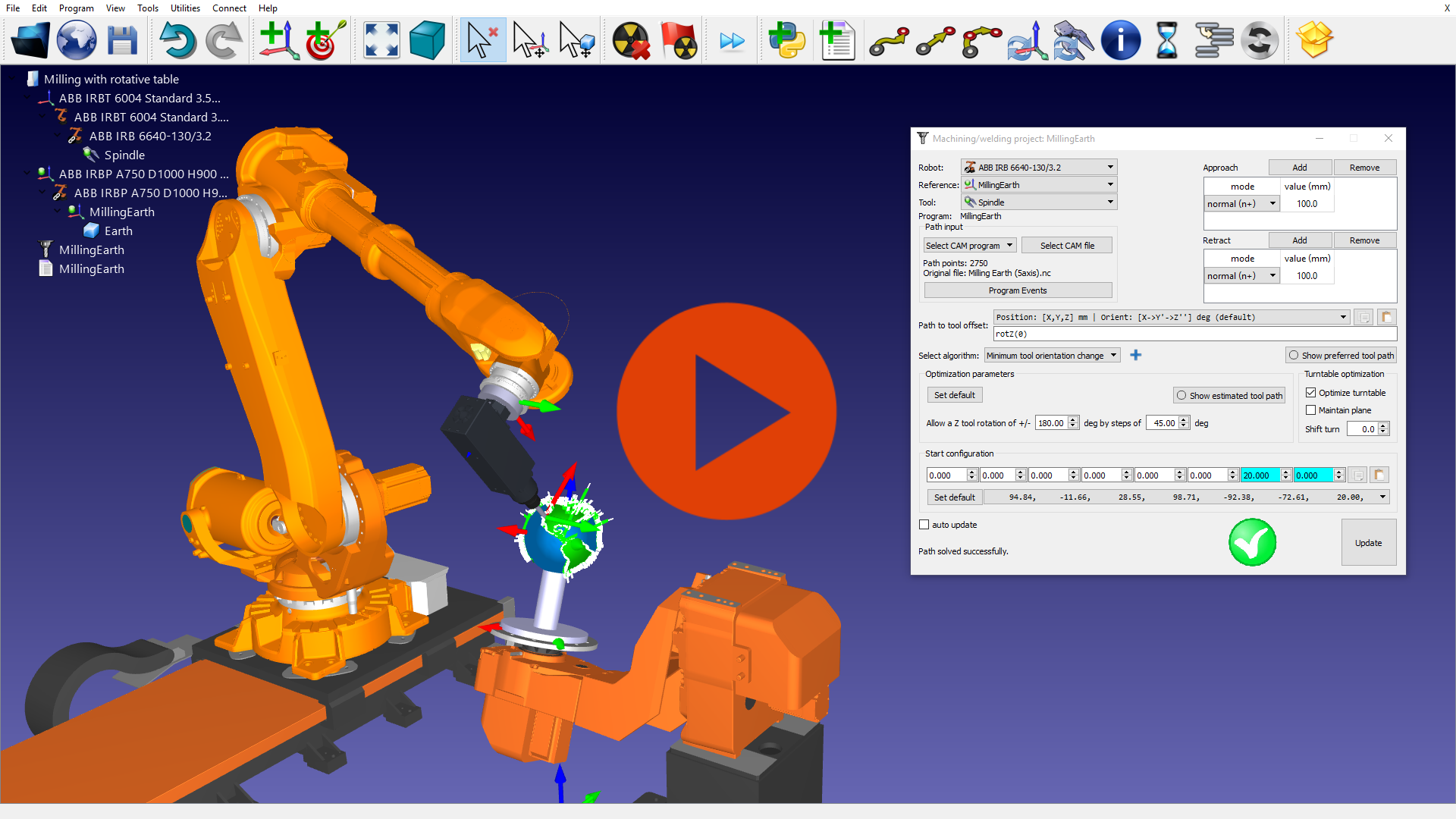
使用机器人外轴铣削
同步机器人与外轴进行铣削。
喷涂
生成机器人路径进行喷涂或者质量检测。
点焊
在RoboDK中简单实现点焊与钻孔
3D打印
使用工业机器人实现3D打印的简单步骤
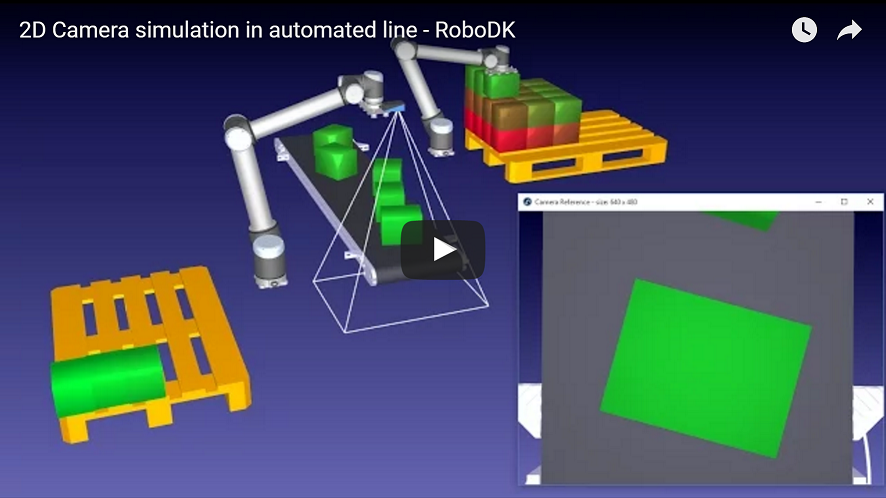
2D相机仿真
在自动生产线中嵌入2D相机进行视觉检测。
使用Python取放
该范例演示了通过 Python 实现包括移动机器人与目标物体的高阶取放仿真。
使用 RoboDK的Python应用程序编程接口(API),通过Python给任何机器人编程。 另外,你还可以使用仿真器的图形界面创建、修改或编辑任何目标物体或机器人。
机器人绘图
该范例演示了使用 RoboDK 仿真喷涂、绘图功能。
机器人通过编程绘制了一幅SVG图像。 通过Python API实现绘图仿真,移动中的机器臂将参考对象“像素”添加到绘图板上。
使用第三方 Python库 将SVG图像转化为机器人坐标。
机器人铣削
使用 RoboDK 仿真及优化任何机器人的轨迹以实现铣削,焊接,喷涂及质量检测。您可以轻松根据CAD文件(支持 STEP 与 IGES )中的点、曲线来生成机器人轨迹。
您还可以使用 RoboDK 将 NC-code 机器加工程序文件(例如 G-code 与 APT 文件)转化为机器人程序文件。 RoboDK自动避免机器人奇异状态(singularities)、轴极限以及障碍。
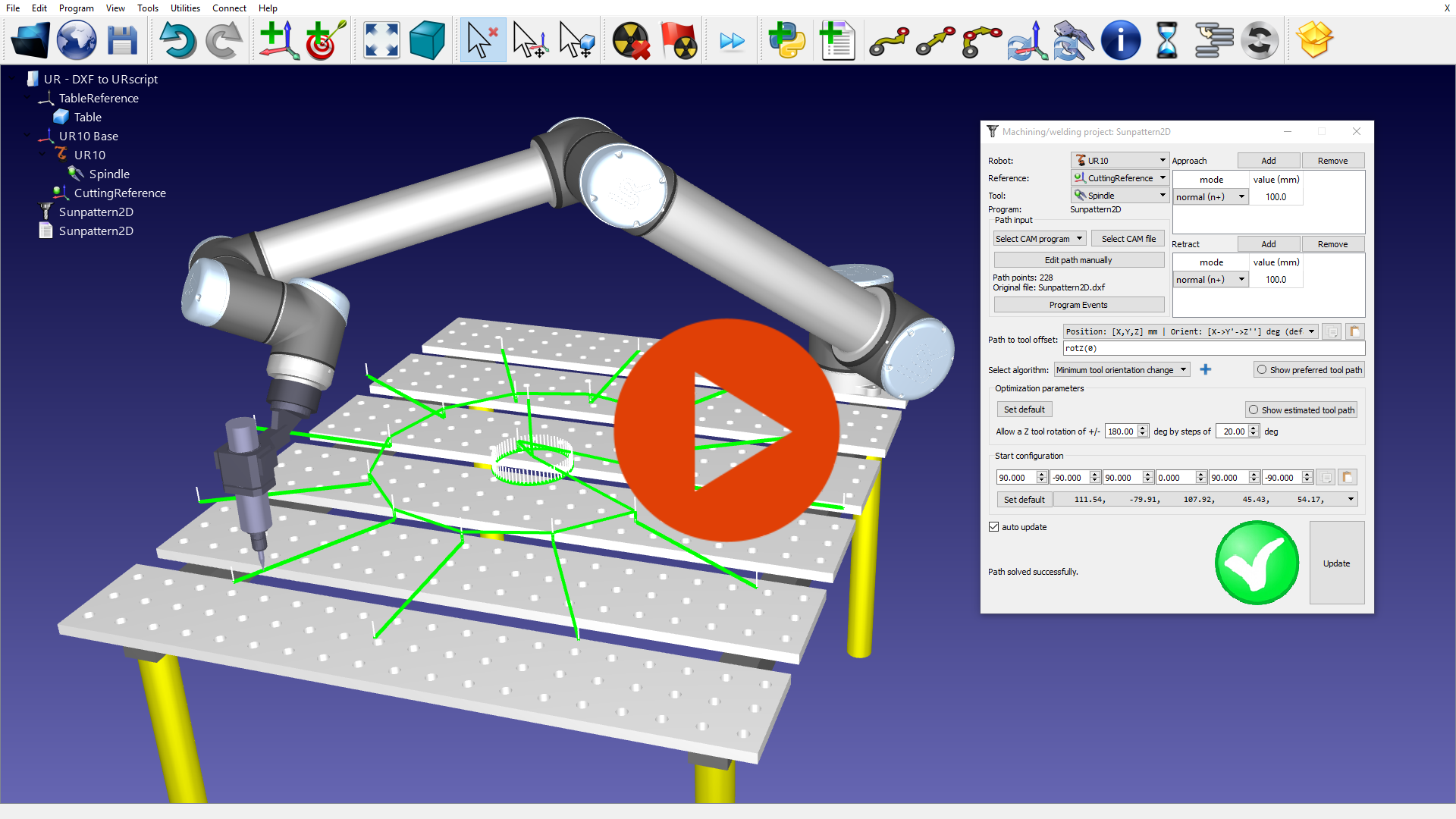
DXF到机器人程序文件
利用DXF文件生成机器人轨迹。该功能适用于在同一平面上的轨迹,例如2D切割。 在本视频中我们使用一台优傲UR10机器人以及DXF文件来生成 URscript 程序文件。
使用机器人外轴铣削
机器人外轴可以通过模拟与机器人同步。该范例使用了一台 ABB 机器人与 ABB 外轴回转台加工球形物体。
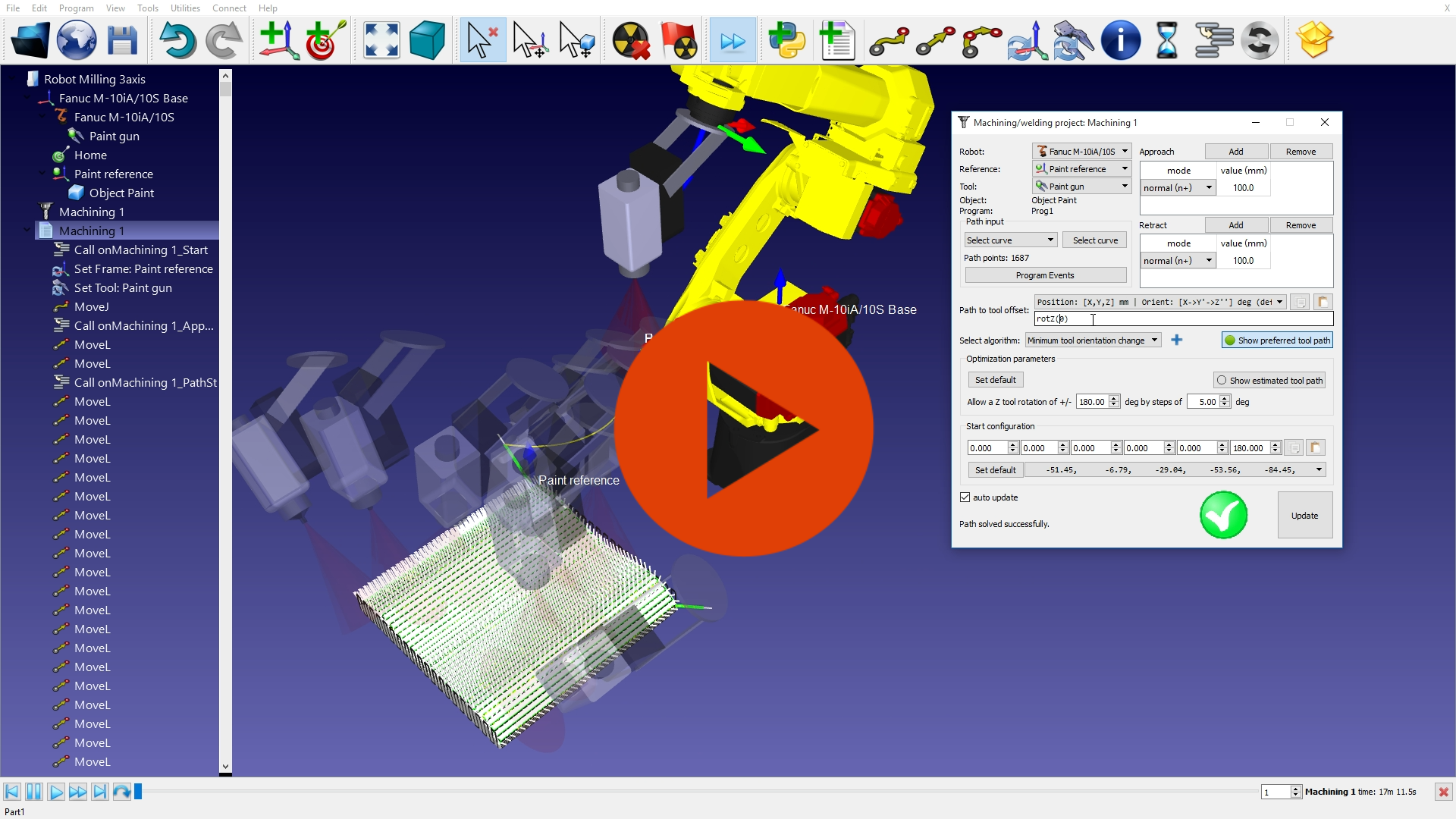
机器人喷涂
RoboDK 可以沿目标物体表面生成轨迹。例如,生成锯齿形轨迹进行喷涂或质量检测。RoboDK 自动避免奇异状态(singularities)、轴极限以及障碍。
只需简单几步即可生成 物体表面目标(菜单“程序”->“表面教授目标”)。
点焊
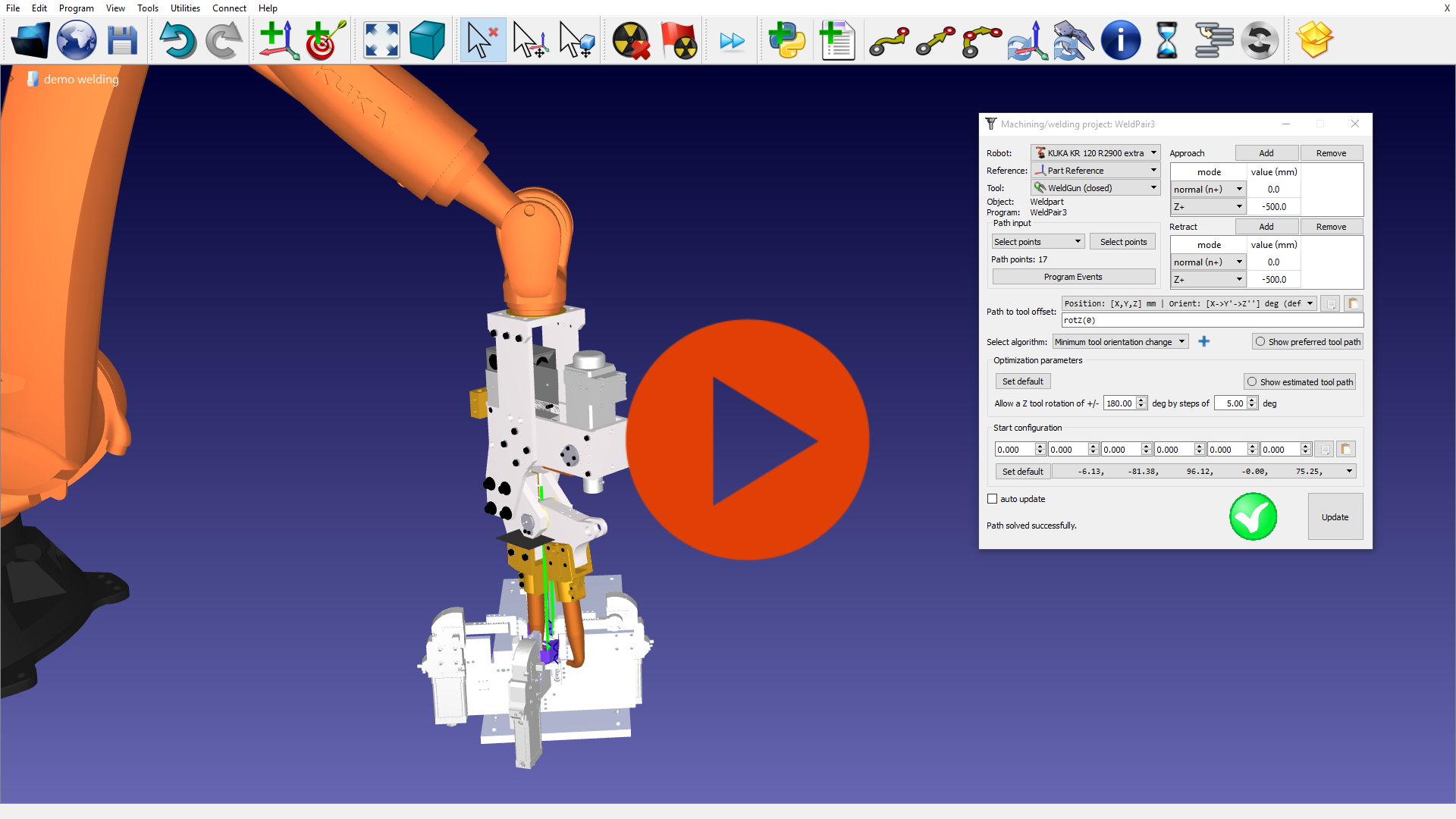
使用 RoboDK 轻松实现点焊。以文本格式导入点、曲线以及加工程序文件(NC-code:G-code,APT,等等…)。此功能同样可用于自动化钻孔程序。
本视频演示了使用一台库卡机器人及HMD焊枪实现点焊。
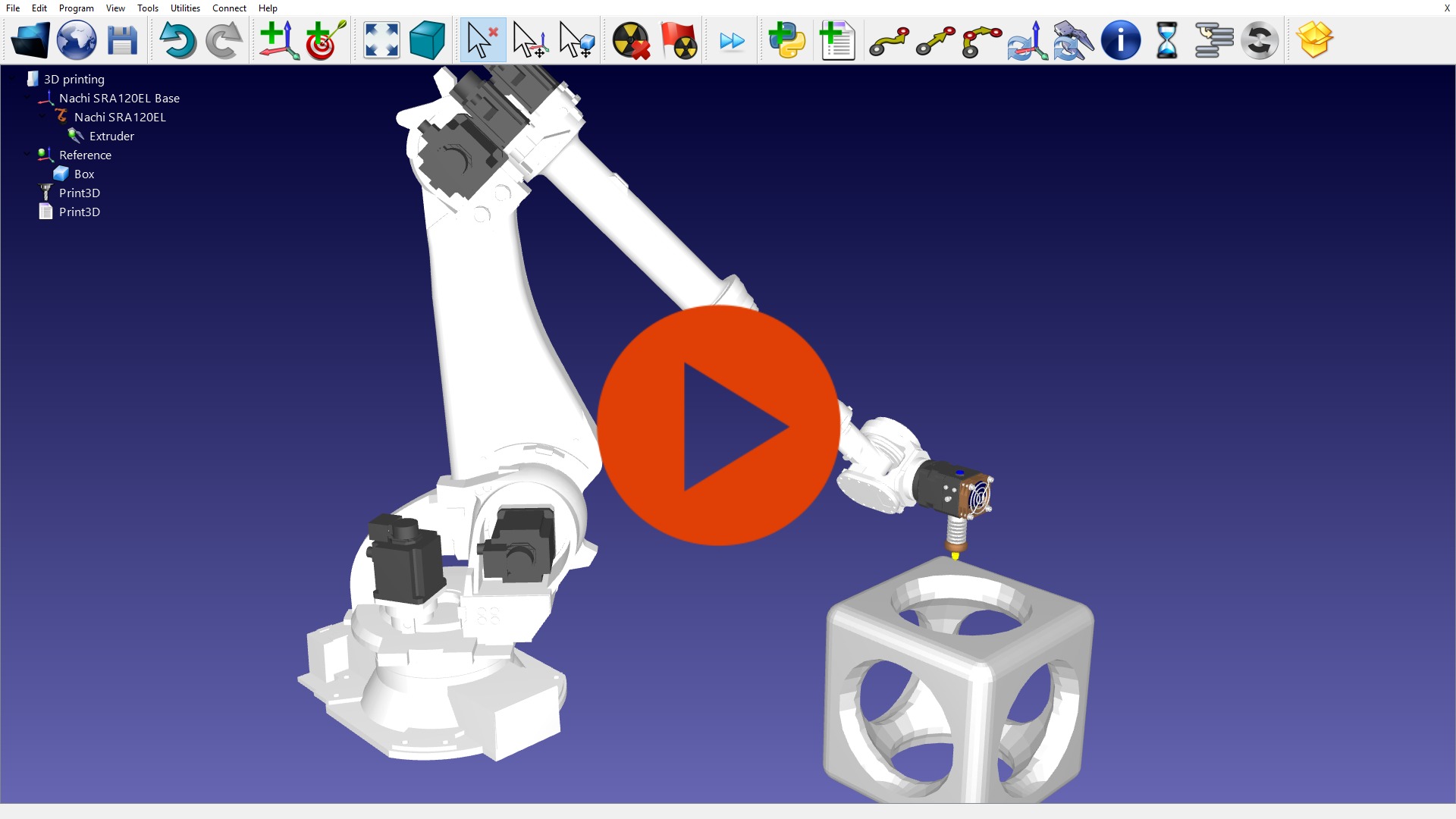
机器人3D打印
在 RoboDK 中只需几个步骤即可实现3D打印。 对3D目标(例如一个STL文件)横向切割分层,进行轨迹规划,仿真机器人3D打印。
仿真调试满意后即可为您的机器人生成相应的程序文件。 在此范例中我们使用了一台 Nachi 机器人打印一个立方物体。
相机检测
使用两台优傲机器人及一只SICK检测相机完成堆砌任务。在 RoboDK 中仿真生产线相机检测功能非常容易。
进入 RoboDK 菜单"连接-仿真2D相机"可以预览相机。相机可被置于机器臂上或者静态置于工作空间内。
手动更改相机参数或者通过RoboDK API的Python脚本更改。轻松调整相机焦距、视角、工作距离以及成像器尺寸,并且可以即时显示相机视野。