机器人校准
机器人校准是一个鉴定工业机器人运动学结构中的真实几何参数的过程,即机械臂连接与关节轴之间的相对位置与方向参数。 可以在20分钟内实现机器人校准。 使用RoboDK校准机器人后,即可离线生成准确的机器人程序,而无需使用第三方软件。
机器人校准功能
- 自动生成测量点与自动数据采集
- 自动避免碰撞
- 使用RoboDK API自定义校准工作空间
- 使用任何测量系统
- 校准任何工业机器人的多达30个参数
- 提高机器人准确性可达10倍
- 支持多数机器人生产商
- 执行ISO9283性能测试
- 参照球杆仪测试对比校准结果
- 无需使用RoboDK过滤机器人加工程序
机器人校准完成后,可以很容易地通过球杆仪测试或者ISO 9283测试(机器人性能分析)对比机器人校准前、后的准确性。用户还可以运行自定义路径的准确性、速度与加速度测试,以获得更详细的性能报告。
如果你是机器人生产商,我们可以为你的产品制定机器人校准过程。
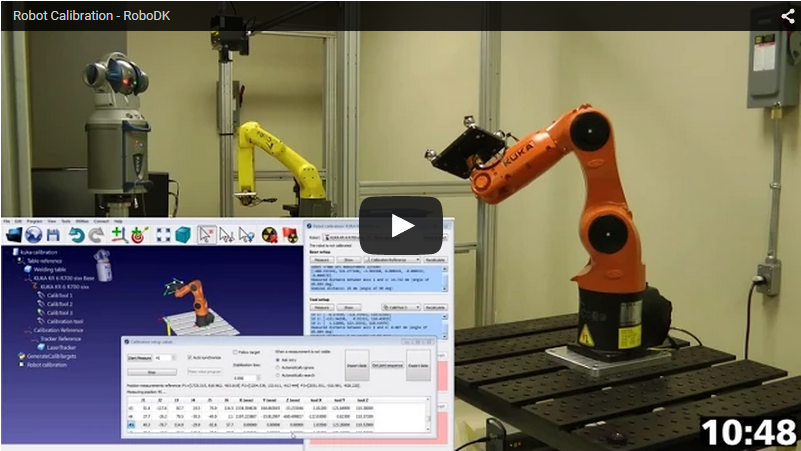
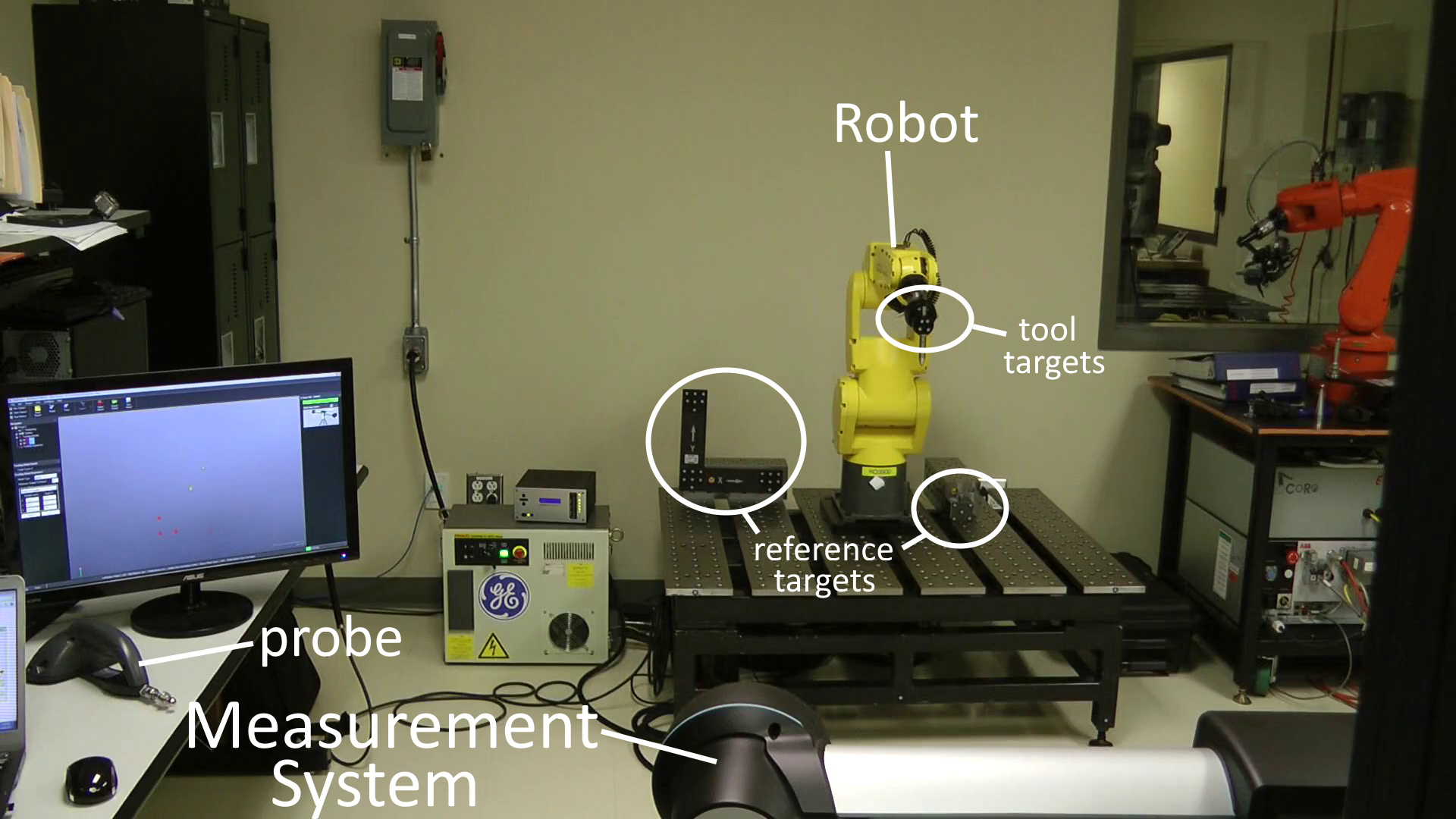
以下视频演示了RoboDK分别通过Faro机器人跟踪仪与Creaform的C-Track双目相机测量仪实现机器人校准的过程。 一台KUKA KR 6 R700机器人与一台Fanuc LR Mate 200iC机器人通过测量标定后,准确性提高了8倍。
这些测试于CoRo实验室完成。
机器人校准的步骤
- (01:38) 基坐标校准(3分钟,6个测量点)
- (03:37) 机器人工具坐标校准(3分钟,9个测量点)
- (05:30) 机器人校准(7分钟,60个测量点)
- (13:34) 验证测试(7分钟,60个测量点)