界面
主菜单内包括了软件内的所有选项。它包括下面几个部分:
1.File menu:加载新的文件(3D物体,机器人,机器人工具,工具路径…),打开或者保存RoboDK项目文件(RDK后缀文件)。
2.Edit menu:剪切/复制/粘贴一个或者一组物体,以及撤销/重做动作。
3.Program menu:新建或者修改机器人仿真程序,以及其他有关离线编程的选项。
4.View menu:在3D空间中巡航,并选择视图角度。
5.Tools menu:工具菜单包括检测碰撞,几何点测量,以及“选项”菜单。
6.Utilities menu: 实用程序菜单包括机器人加工设置,TCP或参考坐标系校准,机器人3D打印,机器人校准... 这些操作可能需要额外的软件许可。
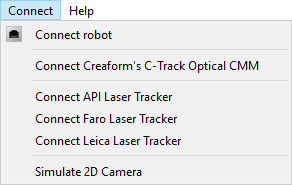
7.Connect menu:连接至一台机器人,测量设备或者相机仿真。
8.Help menu:打开在线帮助文件(F1),查看版本更新以及设置软件许可。
在文件菜单中可以打开,保存或者输出文件。
![]() New Station 将在树型结构中添加新的工作站。可以通过RDK文件加载或者保存工作站。RDK文件(RDK后缀)包括工作站内机器人以及物体等的所有信息,所以不需要单独备份工作站内的任何项目。
New Station 将在树型结构中添加新的工作站。可以通过RDK文件加载或者保存工作站。RDK文件(RDK后缀)包括工作站内机器人以及物体等的所有信息,所以不需要单独备份工作站内的任何项目。
![]() Open 加载一个RoboDK文件(RDK工作站)或者加载任何支持的文件格式,例如机器人文件.robot,物体数模文件STEP/IGES/STL,机器人工具文件.tool等等。
Open 加载一个RoboDK文件(RDK工作站)或者加载任何支持的文件格式,例如机器人文件.robot,物体数模文件STEP/IGES/STL,机器人工具文件.tool等等。
![]() Open online library 在窗口中显示在线机器人模型库。
Open online library 在窗口中显示在线机器人模型库。
![]() Save Station 保存RDK文件。选择
Save Station 保存RDK文件。选择![]() Save Station as…输入文件保存的位置。
Save Station as…输入文件保存的位置。
![]() Make a demo 将工作站输出为EXE文件与简版RoboDK(用于演示文件)。
Make a demo 将工作站输出为EXE文件与简版RoboDK(用于演示文件)。
![]() Export Simulation 将仿真程序输出为3D PDF或者3D HTML文件。Example。
Export Simulation 将仿真程序输出为3D PDF或者3D HTML文件。Example。

撤销(Ctrl+Z)和重做(Ctrl+Y)在Edit菜单内。可以在撤销堆栈内前进或者后退,选择回到某一状态。
可以在工作站树型结构中![]() 剪切(Ctrl+X),
剪切(Ctrl+X),![]() 复制(Ctrl+C)或者
复制(Ctrl+C)或者![]() 粘贴(Ctrl+V)一个或一组项目。如果拷贝一个父级项目,它下面的子级项目也将被拷贝。
粘贴(Ctrl+V)一个或一组项目。如果拷贝一个父级项目,它下面的子级项目也将被拷贝。


程序菜单包括了关于离线编程以及生成程序需要的所有项目。可以给机器人添加新的仿真程序,参考坐标系,机器人目标或者机器人工具。这些离线编程项目(参考坐标,目标,工具,等等)出现在离线生成的程序中。
![]() Add Reference Frame 为工作站添加参考坐标系,或者,如果已选中了一个参考坐标系,新的坐标系将依附于已有坐标系。
Add Reference Frame 为工作站添加参考坐标系,或者,如果已选中了一个参考坐标系,新的坐标系将依附于已有坐标系。
![]() Add empty tool 为机器人添加新的工具(TCP)。此时不需要工具几何信息。可以使用同一几何物体的不同部分定义多个工具。
Add empty tool 为机器人添加新的工具(TCP)。此时不需要工具几何信息。可以使用同一几何物体的不同部分定义多个工具。
![]() Teach Target (Ctrl+T) 为当前参考坐标系添加一个新的机器人目标(使用当前工具)。可以在robot panel中选择当前参考坐标系与当前机器人工具。也可以通过右键单击,将项目设置为当前坐标系或者当前工具。
Teach Target (Ctrl+T) 为当前参考坐标系添加一个新的机器人目标(使用当前工具)。可以在robot panel中选择当前参考坐标系与当前机器人工具。也可以通过右键单击,将项目设置为当前坐标系或者当前工具。
![]() Teach Targets on Surface (Ctrl+Shift+T) 在物体表面点选机器人目标。请参考this section的范例。
Teach Targets on Surface (Ctrl+Shift+T) 在物体表面点选机器人目标。请参考this section的范例。
![]() Add Program 使用RoboDK的图形用户界面(GUI)添加新的机器人仿真程序。利用图形界面生成或者修改程序,无需编程水平。经过仿真后可以自动生成与机器人品牌相匹配的程序。
Add Program 使用RoboDK的图形用户界面(GUI)添加新的机器人仿真程序。利用图形界面生成或者修改程序,无需编程水平。经过仿真后可以自动生成与机器人品牌相匹配的程序。
帮助文件的Program Instructions部分提供了使用GUI执行机器人程序指令的更多信息。
![]() Add Python Program 在工作站内新建一个与RoboDK应用编程接口(API)相关联的Python程序/宏/脚本文件/模块。Python程序可以通过RoboDK API使用通用编程语言(Python)新建机器人仿真程序。可以为相应的机器人控制器定制程序。Python可以延申RoboDK的GUI并仿真特定的任务。这些任务可以是离线编程的子程序,在线编程,或者仿真某个事件,例如在取放任务仿真时在随机位置自动生成物体作为拾取目标。Python程序是在工作站中嵌入的文本文件,通过Python代码使RoboDK的某些任务自动化。在默认设置下,RoboDK的API是通过Python实现的,但是也可以使用其他编程语言的RoboDK接口。
Add Python Program 在工作站内新建一个与RoboDK应用编程接口(API)相关联的Python程序/宏/脚本文件/模块。Python程序可以通过RoboDK API使用通用编程语言(Python)新建机器人仿真程序。可以为相应的机器人控制器定制程序。Python可以延申RoboDK的GUI并仿真特定的任务。这些任务可以是离线编程的子程序,在线编程,或者仿真某个事件,例如在取放任务仿真时在随机位置自动生成物体作为拾取目标。Python程序是在工作站中嵌入的文本文件,通过Python代码使RoboDK的某些任务自动化。在默认设置下,RoboDK的API是通过Python实现的,但是也可以使用其他编程语言的RoboDK接口。
最后,可以通过![]() Add or Edit Post Processors添加或编辑后置处理器。后置处理器负责定义机器人程序的语义,使其与相应的机器人控制器匹配,可支持多个品牌的机器人编程语言。后处理是离线编程的最后一步。
Add or Edit Post Processors添加或编辑后置处理器。后置处理器负责定义机器人程序的语义,使其与相应的机器人控制器匹配,可支持多个品牌的机器人编程语言。后处理是离线编程的最后一步。

在视图菜单中包括3D空间巡航所需要的选项。在该菜单中,可以旋转,平移或缩放视图(或者在3D视图内使用右键菜单)。便于通过笔记本电脑的触摸板进行3D视图(代替鼠标)。
需要根据任意方向自由旋转,则取消选择:View➔Align rotation。否则,默认状态下RoboDK将XY平面锁定为水平面。
可以通过星号键(*)显示或者隐藏机器人的有效工作空间。还可以使用F7键查看被隐藏的物体。

在工具菜单中包括通用工具,例如3D视图截屏,启动机器人路径跟踪,启动碰撞检测,几何点坐标的测量等等。
启动![]() Trace 将显示机器人的运动轨迹。
Trace 将显示机器人的运动轨迹。
![]() Check collisions 将启动碰撞检测,此时处在碰撞状态的物体会变成红色。可以使用
Check collisions 将启动碰撞检测,此时处在碰撞状态的物体会变成红色。可以使用![]() Collision map设置物体之间的碰撞检测关系。
Collision map设置物体之间的碰撞检测关系。
![]() Change color tool可以在弹出窗内改变机器人或者物体的颜色。还可以反转物体表面垂直向量的方向。
Change color tool可以在弹出窗内改变机器人或者物体的颜色。还可以反转物体表面垂直向量的方向。
![]() Measure可以根据一个参考坐标系或者工作站参考坐标系(绝对原点)测量3D几何点在空间内的坐标值。
Measure可以根据一个参考坐标系或者工作站参考坐标系(绝对原点)测量3D几何点在空间内的坐标值。
可以使用Tools➔Language设置RoboDK界面的语言,改变将即时生效。
Toolbar Layout设置默认的工具栏布局。或者,可以选择简化的工具栏或者复杂的工具栏。
选择![]() Options 打开选项菜单。更多信息在Options Menu部分。
Options 打开选项菜单。更多信息在Options Menu部分。

实用程序菜单用于以下任务:
![]() Calibrate Tool frame (TCP)通过提供真实工作环境中的数据,标定机器人工具(TCP)。例如使用TCP从不同方向接近并触碰同一几何点的机器人关节轴角度值。多数机器人示教器都支持这一功能。RoboDK允许用户使用无限多的点标定TCP。使用的点越多,标定结果的准确性越高。更多有关机器人工具标定的内容:Read more about TCP calibration。
Calibrate Tool frame (TCP)通过提供真实工作环境中的数据,标定机器人工具(TCP)。例如使用TCP从不同方向接近并触碰同一几何点的机器人关节轴角度值。多数机器人示教器都支持这一功能。RoboDK允许用户使用无限多的点标定TCP。使用的点越多,标定结果的准确性越高。更多有关机器人工具标定的内容:Read more about TCP calibration。
![]() Calibrate Reference Frame根据真实机器人基坐标,标定一个参考坐标系。此操作将虚拟环境中的坐标与真实物体相匹配。更多有关参考坐标系标定的内容:Read more about Reference Frame calibration。
Calibrate Reference Frame根据真实机器人基坐标,标定一个参考坐标系。此操作将虚拟环境中的坐标与真实物体相匹配。更多有关参考坐标系标定的内容:Read more about Reference Frame calibration。
![]() Synchronize External Axes为机器人设置一个或多个外部轴机械结构。更多信息请参考External Axes section。
Synchronize External Axes为机器人设置一个或多个外部轴机械结构。更多信息请参考External Axes section。
![]() Robot Milling project(机器人加工项目)将机器加工的刀具轨迹转化为机器人仿真程序。在机器加工领域,使用计算机辅助加工(CAM)软件为5轴数控机床(CNC)生成的程序,例如通用的G-Code或者APT文件,都可以导入RoboDK中。RoboDK可以将此类程序/刀具轨迹转化为机器人程序并仿真。更多信息请参考this部分。
Robot Milling project(机器人加工项目)将机器加工的刀具轨迹转化为机器人仿真程序。在机器加工领域,使用计算机辅助加工(CAM)软件为5轴数控机床(CNC)生成的程序,例如通用的G-Code或者APT文件,都可以导入RoboDK中。RoboDK可以将此类程序/刀具轨迹转化为机器人程序并仿真。更多信息请参考this部分。
![]() Curve follow project(曲线追踪项目)与机器人加工项目相似,并可以从3D几何物体中提取曲线信息并转化为机器人路径。还可以使用Import Curve从CSV或者TXT文件中导入3D曲线。这些曲线的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考curve follow project部分。
Curve follow project(曲线追踪项目)与机器人加工项目相似,并可以从3D几何物体中提取曲线信息并转化为机器人路径。还可以使用Import Curve从CSV或者TXT文件中导入3D曲线。这些曲线的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考curve follow project部分。
![]() Point follow project(点追踪项目)与机器人加工项目相似,并可以从3D几何物体中提取点位置信息并转化为机器人路径。还可以使用Import Points从CSV或者TXT文件中导入3D点信息。这些点的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考point follow project部分。
Point follow project(点追踪项目)与机器人加工项目相似,并可以从3D几何物体中提取点位置信息并转化为机器人路径。还可以使用Import Points从CSV或者TXT文件中导入3D点信息。这些点的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考point follow project部分。
使用3D print project为物体生成机器人3D打印程序。该物体需要已经存在于RoboDK工作站中。RoboDK通过切片软件(Slicer)将3D打印路径转化为G-Code程序,即等同于3轴机器人加工刀具路径。更多信息请参考robot 3D printing部分。
Ballbar Accuracy测试。可以通过Telescoping Double Ballbar设备测试机器人性能(准确性)。更多关于球杆仪测试的内容请参考:https://robodk.com/ballbar-test.
![]() Calibrate Robot新建机器人校准项目,可以找出机器人微误差参数并提高机器人准确性。经过校准后的机器人模型可用于任何RoboDK离线仿真项目中。通常情况下,机器人校准将提高机器人的准确性5倍或者更多,取决于机器人型号。机器人校准需要额外的测量设备来测量机器人位置。机器人的准确性与重复性可以通过ISO9283标准,在校准前、后分别测试并验证。更多关于机器人校准与性能测试的内容请参考:https://robodk.com/robot-calibration。
Calibrate Robot新建机器人校准项目,可以找出机器人微误差参数并提高机器人准确性。经过校准后的机器人模型可用于任何RoboDK离线仿真项目中。通常情况下,机器人校准将提高机器人的准确性5倍或者更多,取决于机器人型号。机器人校准需要额外的测量设备来测量机器人位置。机器人的准确性与重复性可以通过ISO9283标准,在校准前、后分别测试并验证。更多关于机器人校准与性能测试的内容请参考:https://robodk.com/robot-calibration。

与机器人建立连接。通过输入连接参数,例如机器人IP地址、FTP用户名与密码,建立RoboDK与机器人之间的连接。可以通过FTP连接传输机器人程序,或者在PC电脑上与RoboDK支持的机器人控制器直接连接并运行机器人程序(通过RoboDK机器人驱动器)。用户也可以开发自己的机器人控制器,更多信息请参考robot drivers部分。
RoboDK还可以连接支持的测量系统,例如激光追踪仪或者Creaform Optical CMM,连接这些设备可以实现机器人校准与性能测试的全自动化。
![]() Help (F1)打开在线帮助文件。在帮助文件每部分的顶端有下载PDF的选项。可以在RoboDK中按F1键,将自动显示与当前选中项目有关的帮助内容。
Help (F1)打开在线帮助文件。在帮助文件每部分的顶端有下载PDF的选项。可以在RoboDK中按F1键,将自动显示与当前选中项目有关的帮助内容。
选择Check for updates…查看软件版本是否需要更新。弹出窗会提示安装新的版本或者当前版本无需更新。如果没有信息弹出,说明RoboDK与因特网的连接或被防火墙阻止。
