界面
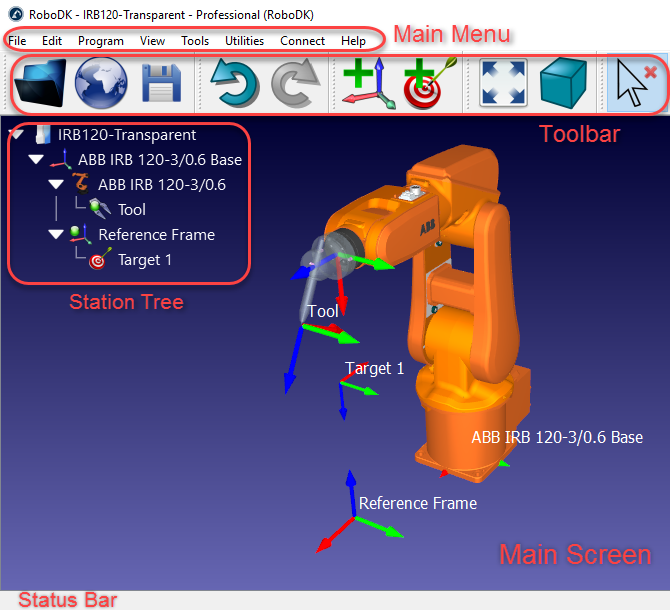
本部分描述RoboDK的主要接口界面,包括机器人控制面板和主菜单。RoboDK的主界面显示以下部分:
●Main Menu(主菜单)位于软件窗口的顶端,软件所有的功能和选项都可以通过主菜单实现。
●工具栏包含了常用功能的图形快捷按钮。更多信息请参考Toolbar(工具栏)部分。
●左侧的树型结构显示了当前工作站中的所有项目。这些项目可以是机器人,机器人工具,物体,机器人目标或者用于机器人加工或者校准的特殊设置项目。树型结构显示了各项目之间的实际从属关系——并可以通过树型结构修改其关系。例如,一个机器人目标可以根据某个参考坐标系来定义(即:机器人目标依附于参考坐标系),而该参考坐标系可以根据机器人基坐标系来定义,机器人工具则一般来说“依附”于机器人。
●窗口底部的Status Bar(状态栏)用于显示有用的操作、运行信息。
●软件窗口的核心区域显示3D虚拟工作环境,并根据树型工作站内的从属关系显示所有项目。
双击(在树型工作站中或者3D空间中)一个项目,该项目的属性窗口会弹出。例如,双击一个机器人时它的Robot Panel(机器人控制面板)会弹出。弹出窗口可以通过点击右上角的x关闭。
作为一个例外,双击一个机器人目标会使机器人移动至该目标。如果只是选中了一个机器人目标(点击它一次,而不是双击),则仿真出机器人从当前位置到达该目标的线性运行或者关节运动。
在工作站树型结构(或者3D空间)内双击机器人以打开机器人控制面板。
可以通过Joint axis jog(关节轴点动控制)或直接输入各关节轴角度值来移动机器人位置。这里的角度值以及当前的机器人位置与机器人控制器的角度值相匹配。双击角度值的上限或者下限数字可以修改机器人的轴极限值。在默认状态下,RoboDK使用机器人出厂设置的硬件极限值。某些应用可能需要对轴极限的进一步限制(软件极限)。关节轴数值可以通过使用相应的按钮:复制![]() 或者粘贴
或者粘贴![]() 为一个数列,即导出或者导入。
为一个数列,即导出或者导入。

控制面板的Cartesian Jog(笛卡尔点动控制)部分显示了与机器人运动有关的信息:
●机器人的工具坐标系Tool Frame(TF)是根据机器人法兰(FF)坐标系定义的,其坐标值代表它距离法兰的位置与方向。机器人法兰为机器人上固定的坐标,而机器人工具坐标系的位置则取决于该工具如何安装于法兰上。该法兰-工具坐标关系在机器人控制器上被保存为UTOOL,ToolData或者Tool的变量。机器人工具又被称为TCP(工具中心点)。可以定义多个工具坐标,但是只能选中一个为“Active”,即当前工具。当新建机器人目标以及机器人程序时,需要使用当前工具坐标为参照。当前工具图标上有绿色圆点作为标识![]() 。
。
●参开坐标系Reference Frame(RF)是根据机器人基坐标Robot Base(BF)定义的。其坐标值代表它距离机器人基底的位置与方向。机器人基坐标相对于机器人是固定的,而不同的参考坐标系可以用于定位不同的物体(相对于同一个机器人基底)。该基底-参考坐标关系在机器人控制器上被保存为UFRAME,WorkObject MFRAME或者Reference变量。在机器人面板中可以选择一个参考坐标系作为“Active”,即当前参考坐标。当新建机器人目标以及机器人程序时,需要使用当前参考坐标系作为参照。当前参考坐标系图标上有绿色圆点作为标识![]() 。
。
●机器人控制面板上Tool Frame (TF) with respect to the Reference Frame (RF) 显示了当前TCP参照于当前参考坐标系的位置,也代表了当前的机器人位置。修改这些数值可以移动机器人——各关节轴的角度值将被自动重新计算。此时新建机器人目标时(Program➔Teach Target),当下的笛卡尔坐标值以及关节轴角度值也将被记录。新的机器人目标会被嵌套在当前参考坐标系之下。
机器人面板的Other configurations下拉菜单中提供了其他机器人“位姿”的选择列表。机器人位姿定义了机器人达到某一目标的位置状态。改变机器人位姿将“跨越”奇异状态。更多信息在Robot Configurations部分。
最好,机器人面板右上方的Parameters按钮可用于调整kinematic运动参数,选择后置处理器或者在机器人校准后提取更准确的参数。在有特定需要时才需要修改这些参数。
双击机器人工具![]() 可以查看该工具的更多信息,并且修改工具坐标系(又称为工具中心点,或TCP)相对于机器人法兰坐标系的位置。
可以查看该工具的更多信息,并且修改工具坐标系(又称为工具中心点,或TCP)相对于机器人法兰坐标系的位置。
点击More options…可通过比例系数改变机器人工具的大小,或者基于机器人法兰改变机器人工具的几何位置。改变此菜单内的数值不会对机器人仿真程序产生影响,工具的几何信息是用于显示以及碰撞检测(保证实际工具不会受到碰撞)。

双击一个参考坐标系![]() 可以查看该坐标的更多信息,并且可以相对于机器人基坐标或者工作站中已有的参考坐标系修改该坐标系的位置。在默认设置下,参考坐标系的位置与方向(姿态)是相对于父级坐标系的(在此范例中,相对于机器人基坐标)。
可以查看该坐标的更多信息,并且可以相对于机器人基坐标或者工作站中已有的参考坐标系修改该坐标系的位置。在默认设置下,参考坐标系的位置与方向(姿态)是相对于父级坐标系的(在此范例中,相对于机器人基坐标)。

用户可以定义多个参考坐标系之间的关系。例如,一个工作台的位置可以相对于机器人基底位置来定义,在工作台上的物体可以相对于工作台位置定义。移动工作台的坐标不会更改物体与工作台之间的位置关系,但是会修改物体与机器人的位置关系。以上内容如图所示。

机器人目标的位置定义了机器人需移动到的位置。按照以下步骤添加新的机器人目标并查看其信息:
●选择Program➔![]() Teach Target (Ctrl+T) 生成一个新的目标。
Teach Target (Ctrl+T) 生成一个新的目标。
本操作根据当前参考坐标系![]() 以及当前机器人工具坐标系
以及当前机器人工具坐标系![]() 记录了机器人的当前位置。该目标被添加至当前参考坐标系之下。
记录了机器人的当前位置。该目标被添加至当前参考坐标系之下。
●右键单击一个机器人目标,选择More Options… (F3)查看已记录的目标姿态(位置与方向)和机器人关节轴角度值。

创建新的机器人目标时将记录TCP相对于参考坐标系的笛卡尔坐标值,以及当前的机器人各轴坐标角度值。在默认状态下,RoboDK将机器人目标定义为笛卡尔目标(Keep cartesian position ![]() )。在此情况下,如果参考坐标系被移动,机器人将试图参照新的参考坐标系位置、达到机器人目标。
)。在此情况下,如果参考坐标系被移动,机器人将试图参照新的参考坐标系位置、达到机器人目标。
另外,也可以将机器人目标定义为关节目标(Keep joint values ![]() )。在此情况下,该目标将保持其绝对的各轴角度值。当参考坐标系被移动时,目标不会移动。
)。在此情况下,该目标将保持其绝对的各轴角度值。当参考坐标系被移动时,目标不会移动。
一个常用的操作是将一系列运动的第一个机器人目标定义为关节目标。例如,将工作范围附近的一个趋近位置定义为关节目标,之后的机器人目标都使用笛卡尔目标,以确保正确的机器人工具轨迹(修改参考坐标系或者机器人工具坐标系时,该轨迹不会改变)。
可以查看机器人到达同一目标的其他位姿。更多信息在next section。
机器人的位姿定义了机器人的某一状态,即它的位置与姿态。不同的机器人位姿可以达到同一机器人工具姿态,而在不同的位姿间转换需要“跨越”奇异状态。当机器人进行线性运动时,机器人控制器无法跨越奇异状态(此时,需要使用关节运动替代线性运动)。换句话说,如需完成机器人在两个目标之间的线性运动,该机器人必须在该直线上的每个点时都保持同一位姿,包括起始点与终点。
右键点击一台机器人并选择Change configuration打开位姿设置窗口。也可以通过机器人控制面板的More options打开该窗口。

经典的6轴机器人在达到某一目标位置时通常可以有8种不同的位姿(假设每个关节轴都可旋转一整圈)。事实上,不同的机器人有不同的轴极限设置。所以,当某一机器人达到某一目标位置时,可能会有1到100种不同的机器人位姿选择。








机器人位姿定义了机器人达到某一目标位置时的状态。例如,机器人可以是肘部向上或者肘部向下(Up vs. Down,或者U/D),同时,它可以面向目标或者底座需要旋转180度达到目标(Front vs. Rear,或者F/R)。最后,机器人第5轴可能上下反转,同时第4轴与第6轴补偿第5轴的运动(Flip vs. Non-Flip,或者F/N)。以上共可提供2*2*2=8种不同的位姿。
可以在RoboDK种导入物体的数字模型,例如STL,STEP或IGES等文件格式。在工作站树型结构或者3D视图中双击一个物体,可以打开它的设置窗口。

可以根据任何参考坐标系查看或者设置该物体的位置。但是,物体通常是根据某一参考坐标系定义的,所以,如果需要移动某物体,建议通过移动该物体的参考坐标来移动它。在RoboDK仿真中,物体还可以在“仿真事件”中由机器人工具抓取。
使用More options…菜单可以改变物体的颜色、按比例缩放尺寸、或者根据自身的参考坐标移动它的几何位置。
主菜单内包括了软件内的所有选项。它包括下面几个部分:
1.File menu:加载新的文件(3D物体,机器人,机器人工具,工具路径…),打开或者保存RoboDK项目文件(RDK后缀文件)。
2.Edit menu:剪切/复制/粘贴一个或者一组物体,以及撤销/重做动作。
3.Program menu:新建或者修改机器人仿真程序,以及其他有关离线编程的选项。
4.View menu:在3D空间中巡航,并选择视图角度。
5.Tools menu:工具菜单包括检测碰撞,几何点测量,以及“选项”菜单。
6.Utilities menu: 实用程序菜单包括机器人加工设置,TCP或参考坐标系校准,机器人3D打印,机器人校准... 这些操作可能需要额外的软件许可。
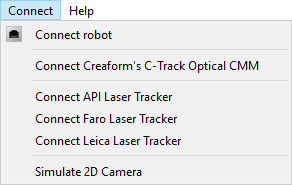
7.Connect menu:连接至一台机器人,测量设备或者相机仿真。
8.Help menu:打开在线帮助文件(F1),查看版本更新以及设置软件许可。
在文件菜单中可以打开,保存或者输出文件。
![]() New Station 将在树型结构中添加新的工作站。可以通过RDK文件加载或者保存工作站。RDK文件(RDK后缀)包括工作站内机器人以及物体等的所有信息,所以不需要单独备份工作站内的任何项目。
New Station 将在树型结构中添加新的工作站。可以通过RDK文件加载或者保存工作站。RDK文件(RDK后缀)包括工作站内机器人以及物体等的所有信息,所以不需要单独备份工作站内的任何项目。
![]() Open 加载一个RoboDK文件(RDK工作站)或者加载任何支持的文件格式,例如机器人文件.robot,物体数模文件STEP/IGES/STL,机器人工具文件.tool等等。
Open 加载一个RoboDK文件(RDK工作站)或者加载任何支持的文件格式,例如机器人文件.robot,物体数模文件STEP/IGES/STL,机器人工具文件.tool等等。
![]() Open online library 在窗口中显示在线机器人模型库。
Open online library 在窗口中显示在线机器人模型库。
![]() Save Station 保存RDK文件。选择
Save Station 保存RDK文件。选择![]() Save Station as…输入文件保存的位置。
Save Station as…输入文件保存的位置。
![]() Make a demo 将工作站输出为EXE文件与简版RoboDK(用于演示文件)。
Make a demo 将工作站输出为EXE文件与简版RoboDK(用于演示文件)。
![]() Export Simulation 将仿真程序输出为3D PDF或者3D HTML文件。Example。
Export Simulation 将仿真程序输出为3D PDF或者3D HTML文件。Example。

撤销(Ctrl+Z)和重做(Ctrl+Y)在Edit菜单内。可以在撤销堆栈内前进或者后退,选择回到某一状态。
可以在工作站树型结构中![]() 剪切(Ctrl+X),
剪切(Ctrl+X),![]() 复制(Ctrl+C)或者
复制(Ctrl+C)或者![]() 粘贴(Ctrl+V)一个或一组项目。如果拷贝一个父级项目,它下面的子级项目也将被拷贝。
粘贴(Ctrl+V)一个或一组项目。如果拷贝一个父级项目,它下面的子级项目也将被拷贝。


程序菜单包括了关于离线编程以及生成程序需要的所有项目。可以给机器人添加新的仿真程序,参考坐标系,机器人目标或者机器人工具。这些离线编程项目(参考坐标,目标,工具,等等)出现在离线生成的程序中。
![]() Add Reference Frame 为工作站添加参考坐标系,或者,如果已选中了一个参考坐标系,新的坐标系将依附于已有坐标系。
Add Reference Frame 为工作站添加参考坐标系,或者,如果已选中了一个参考坐标系,新的坐标系将依附于已有坐标系。
![]() Add empty tool 为机器人添加新的工具(TCP)。此时不需要工具几何信息。可以使用同一几何物体的不同部分定义多个工具。
Add empty tool 为机器人添加新的工具(TCP)。此时不需要工具几何信息。可以使用同一几何物体的不同部分定义多个工具。
![]() Teach Target (Ctrl+T) 为当前参考坐标系添加一个新的机器人目标(使用当前工具)。可以在robot panel中选择当前参考坐标系与当前机器人工具。也可以通过右键单击,将项目设置为当前坐标系或者当前工具。
Teach Target (Ctrl+T) 为当前参考坐标系添加一个新的机器人目标(使用当前工具)。可以在robot panel中选择当前参考坐标系与当前机器人工具。也可以通过右键单击,将项目设置为当前坐标系或者当前工具。
![]() Teach Targets on Surface (Ctrl+Shift+T) 在物体表面点选机器人目标。请参考this section的范例。
Teach Targets on Surface (Ctrl+Shift+T) 在物体表面点选机器人目标。请参考this section的范例。
![]() Add Program 使用RoboDK的图形用户界面(GUI)添加新的机器人仿真程序。利用图形界面生成或者修改程序,无需编程水平。经过仿真后可以自动生成与机器人品牌相匹配的程序。
Add Program 使用RoboDK的图形用户界面(GUI)添加新的机器人仿真程序。利用图形界面生成或者修改程序,无需编程水平。经过仿真后可以自动生成与机器人品牌相匹配的程序。
帮助文件的Program Instructions部分提供了使用GUI执行机器人程序指令的更多信息。
![]() Add Python Program 在工作站内新建一个与RoboDK应用编程接口(API)相关联的Python程序/宏/脚本文件/模块。Python程序可以通过RoboDK API使用通用编程语言(Python)新建机器人仿真程序。可以为相应的机器人控制器定制程序。Python可以延申RoboDK的GUI并仿真特定的任务。这些任务可以是离线编程的子程序,在线编程,或者仿真某个事件,例如在取放任务仿真时在随机位置自动生成物体作为拾取目标。Python程序是在工作站中嵌入的文本文件,通过Python代码使RoboDK的某些任务自动化。在默认设置下,RoboDK的API是通过Python实现的,但是也可以使用其他编程语言的RoboDK接口。
Add Python Program 在工作站内新建一个与RoboDK应用编程接口(API)相关联的Python程序/宏/脚本文件/模块。Python程序可以通过RoboDK API使用通用编程语言(Python)新建机器人仿真程序。可以为相应的机器人控制器定制程序。Python可以延申RoboDK的GUI并仿真特定的任务。这些任务可以是离线编程的子程序,在线编程,或者仿真某个事件,例如在取放任务仿真时在随机位置自动生成物体作为拾取目标。Python程序是在工作站中嵌入的文本文件,通过Python代码使RoboDK的某些任务自动化。在默认设置下,RoboDK的API是通过Python实现的,但是也可以使用其他编程语言的RoboDK接口。
最后,可以通过![]() Add or Edit Post Processors添加或编辑后置处理器。后置处理器负责定义机器人程序的语义,使其与相应的机器人控制器匹配,可支持多个品牌的机器人编程语言。后处理是离线编程的最后一步。
Add or Edit Post Processors添加或编辑后置处理器。后置处理器负责定义机器人程序的语义,使其与相应的机器人控制器匹配,可支持多个品牌的机器人编程语言。后处理是离线编程的最后一步。

在视图菜单中包括3D空间巡航所需要的选项。在该菜单中,可以旋转,平移或缩放视图(或者在3D视图内使用右键菜单)。便于通过笔记本电脑的触摸板进行3D视图(代替鼠标)。
需要根据任意方向自由旋转,则取消选择:View➔Align rotation。否则,默认状态下RoboDK将XY平面锁定为水平面。
可以通过星号键(*)显示或者隐藏机器人的有效工作空间。还可以使用F7键查看被隐藏的物体。

在工具菜单中包括通用工具,例如3D视图截屏,启动机器人路径跟踪,启动碰撞检测,几何点坐标的测量等等。
启动![]() Trace 将显示机器人的运动轨迹。
Trace 将显示机器人的运动轨迹。
![]() Check collisions 将启动碰撞检测,此时处在碰撞状态的物体会变成红色。可以使用
Check collisions 将启动碰撞检测,此时处在碰撞状态的物体会变成红色。可以使用![]() Collision map设置物体之间的碰撞检测关系。
Collision map设置物体之间的碰撞检测关系。
![]() Change color tool可以在弹出窗内改变机器人或者物体的颜色。还可以反转物体表面垂直向量的方向。
Change color tool可以在弹出窗内改变机器人或者物体的颜色。还可以反转物体表面垂直向量的方向。
![]() Measure可以根据一个参考坐标系或者工作站参考坐标系(绝对原点)测量3D几何点在空间内的坐标值。
Measure可以根据一个参考坐标系或者工作站参考坐标系(绝对原点)测量3D几何点在空间内的坐标值。
可以使用Tools➔Language设置RoboDK界面的语言,改变将即时生效。
Toolbar Layout设置默认的工具栏布局。或者,可以选择简化的工具栏或者复杂的工具栏。
选择![]() Options 打开选项菜单。更多信息在Options Menu部分。
Options 打开选项菜单。更多信息在Options Menu部分。

实用程序菜单用于以下任务:
![]() Calibrate Tool frame (TCP)通过提供真实工作环境中的数据,标定机器人工具(TCP)。例如使用TCP从不同方向接近并触碰同一几何点的机器人关节轴角度值。多数机器人示教器都支持这一功能。RoboDK允许用户使用无限多的点标定TCP。使用的点越多,标定结果的准确性越高。更多有关机器人工具标定的内容:Read more about TCP calibration。
Calibrate Tool frame (TCP)通过提供真实工作环境中的数据,标定机器人工具(TCP)。例如使用TCP从不同方向接近并触碰同一几何点的机器人关节轴角度值。多数机器人示教器都支持这一功能。RoboDK允许用户使用无限多的点标定TCP。使用的点越多,标定结果的准确性越高。更多有关机器人工具标定的内容:Read more about TCP calibration。
![]() Calibrate Reference Frame根据真实机器人基坐标,标定一个参考坐标系。此操作将虚拟环境中的坐标与真实物体相匹配。更多有关参考坐标系标定的内容:Read more about Reference Frame calibration。
Calibrate Reference Frame根据真实机器人基坐标,标定一个参考坐标系。此操作将虚拟环境中的坐标与真实物体相匹配。更多有关参考坐标系标定的内容:Read more about Reference Frame calibration。
![]() Synchronize External Axes为机器人设置一个或多个外部轴机械结构。更多信息请参考External Axes section。
Synchronize External Axes为机器人设置一个或多个外部轴机械结构。更多信息请参考External Axes section。
![]() Robot Milling project(机器人加工项目)将机器加工的刀具轨迹转化为机器人仿真程序。在机器加工领域,使用计算机辅助加工(CAM)软件为5轴数控机床(CNC)生成的程序,例如通用的G-Code或者APT文件,都可以导入RoboDK中。RoboDK可以将此类程序/刀具轨迹转化为机器人程序并仿真。更多信息请参考this部分。
Robot Milling project(机器人加工项目)将机器加工的刀具轨迹转化为机器人仿真程序。在机器加工领域,使用计算机辅助加工(CAM)软件为5轴数控机床(CNC)生成的程序,例如通用的G-Code或者APT文件,都可以导入RoboDK中。RoboDK可以将此类程序/刀具轨迹转化为机器人程序并仿真。更多信息请参考this部分。
![]() Curve follow project(曲线追踪项目)与机器人加工项目相似,并可以从3D几何物体中提取曲线信息并转化为机器人路径。还可以使用Import Curve从CSV或者TXT文件中导入3D曲线。这些曲线的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考curve follow project部分。
Curve follow project(曲线追踪项目)与机器人加工项目相似,并可以从3D几何物体中提取曲线信息并转化为机器人路径。还可以使用Import Curve从CSV或者TXT文件中导入3D曲线。这些曲线的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考curve follow project部分。
![]() Point follow project(点追踪项目)与机器人加工项目相似,并可以从3D几何物体中提取点位置信息并转化为机器人路径。还可以使用Import Points从CSV或者TXT文件中导入3D点信息。这些点的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考point follow project部分。
Point follow project(点追踪项目)与机器人加工项目相似,并可以从3D几何物体中提取点位置信息并转化为机器人路径。还可以使用Import Points从CSV或者TXT文件中导入3D点信息。这些点的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考point follow project部分。
使用3D print project为物体生成机器人3D打印程序。该物体需要已经存在于RoboDK工作站中。RoboDK通过切片软件(Slicer)将3D打印路径转化为G-Code程序,即等同于3轴机器人加工刀具路径。更多信息请参考robot 3D printing部分。
Ballbar Accuracy测试。可以通过Telescoping Double Ballbar设备测试机器人性能(准确性)。更多关于球杆仪测试的内容请参考:https://robodk.com/ballbar-test.
![]() Calibrate Robot新建机器人校准项目,可以找出机器人微误差参数并提高机器人准确性。经过校准后的机器人模型可用于任何RoboDK离线仿真项目中。通常情况下,机器人校准将提高机器人的准确性5倍或者更多,取决于机器人型号。机器人校准需要额外的测量设备来测量机器人位置。机器人的准确性与重复性可以通过ISO9283标准,在校准前、后分别测试并验证。更多关于机器人校准与性能测试的内容请参考:https://robodk.com/robot-calibration。
Calibrate Robot新建机器人校准项目,可以找出机器人微误差参数并提高机器人准确性。经过校准后的机器人模型可用于任何RoboDK离线仿真项目中。通常情况下,机器人校准将提高机器人的准确性5倍或者更多,取决于机器人型号。机器人校准需要额外的测量设备来测量机器人位置。机器人的准确性与重复性可以通过ISO9283标准,在校准前、后分别测试并验证。更多关于机器人校准与性能测试的内容请参考:https://robodk.com/robot-calibration。

与机器人建立连接。通过输入连接参数,例如机器人IP地址、FTP用户名与密码,建立RoboDK与机器人之间的连接。可以通过FTP连接传输机器人程序,或者在PC电脑上与RoboDK支持的机器人控制器直接连接并运行机器人程序(通过RoboDK机器人驱动器)。用户也可以开发自己的机器人控制器,更多信息请参考robot drivers部分。
RoboDK还可以连接支持的测量系统,例如激光追踪仪或者Creaform Optical CMM,连接这些设备可以实现机器人校准与性能测试的全自动化。
![]() Help (F1)打开在线帮助文件。在帮助文件每部分的顶端有下载PDF的选项。可以在RoboDK中按F1键,将自动显示与当前选中项目有关的帮助内容。
Help (F1)打开在线帮助文件。在帮助文件每部分的顶端有下载PDF的选项。可以在RoboDK中按F1键,将自动显示与当前选中项目有关的帮助内容。
选择Check for updates…查看软件版本是否需要更新。弹出窗会提示安装新的版本或者当前版本无需更新。如果没有信息弹出,说明RoboDK与因特网的连接或被防火墙阻止。
