Siemens Solid Edge 用 RoboDK 插件
Siemens Solid Edge 的 RoboDK 插件允許您將 Solid Edge 的 3D CAD 建模功能與 RoboDK 相結合,用於機器人仿真、離線編程和機器人製造工程。
你可以透過使用 Solid Edge 的 RoboDK 插件,輕鬆地將在 Solid Edge 中創建的 3D 模型加載到 RoboDK。該插件允許您直接從 Solid Edge 設計對 500 多個機器人手臂進行編程。
機器人可以輕鬆編程為 5 軸機器,用於各種製造應用,例如鑽孔、焊接、修整、3D 打印或機器人加工。請參考以下文檔查詢更多資訊:機器人製造
後置處理器文檔列出了其支援的機器人品牌和控制器列表。你也也可以自行修改或創建新的後處理器來定製程序生成。
Solid Edge works的 RoboDK 插件適用於 Solid Edge 及更高版本。如果您已經擁有RoboDK 許可證,使可以無限制地使用 Solid Edge 的 RoboDK 插件所有功能。
如果您在安裝 Siemens Solid Edge 後才安裝 RoboDK 軟件,您應該可以使用 Solid Edge 的 RoboDK 插件,而Solid Edge 的 RoboDK 插件會表示在工具欄中。

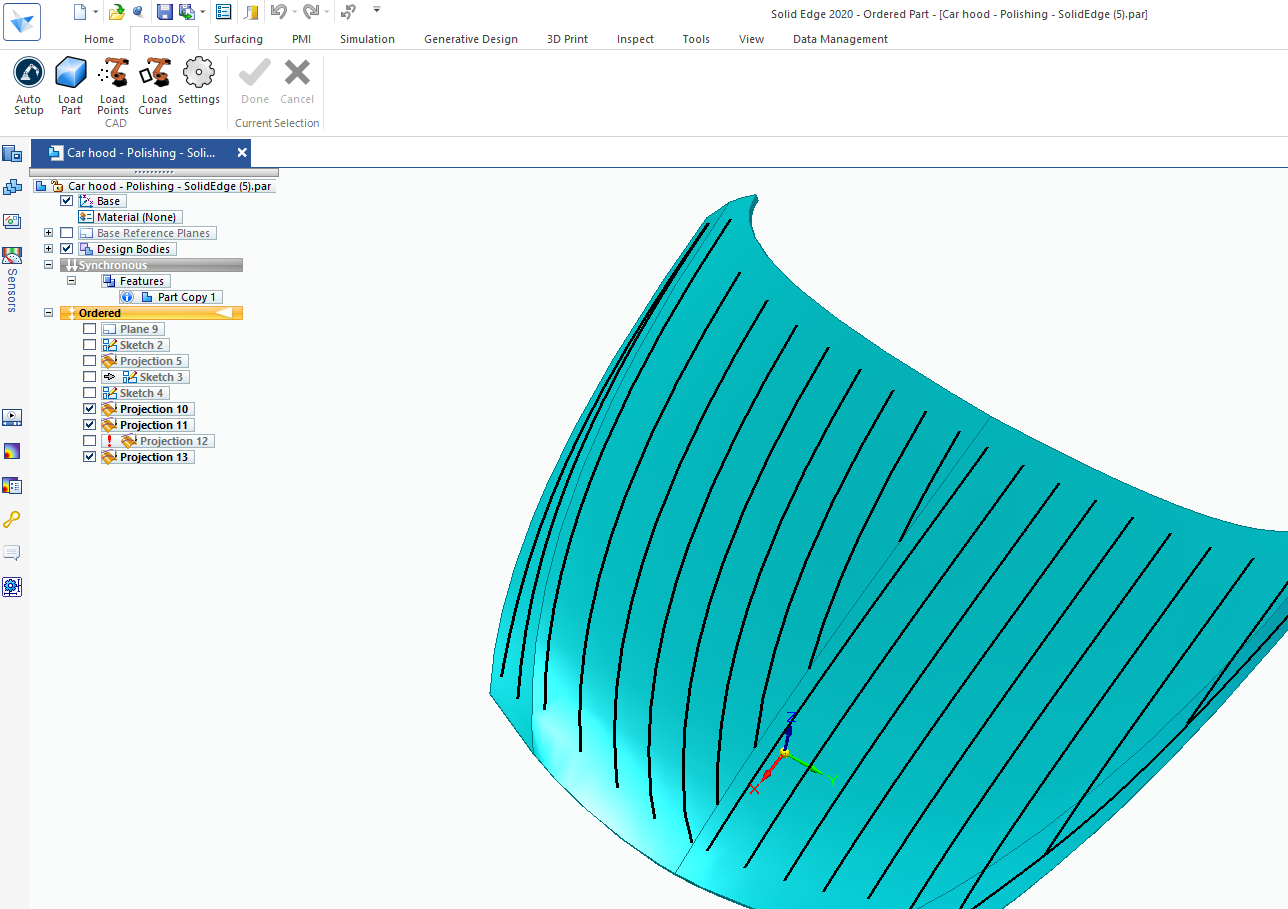
Solid Edge 的 RoboDK 工具欄包括 5 個用於 CAD 的命令。

●![]() Auto Setup –你可以使用這個功能鍵來選擇任何幾何體(曲線或點),它們將與 3D 模型一起加載到 RoboDK 軟件中,而這按鈕是對應於 RoboDK_AutoSetup 命令。
Auto Setup –你可以使用這個功能鍵來選擇任何幾何體(曲線或點),它們將與 3D 模型一起加載到 RoboDK 軟件中,而這按鈕是對應於 RoboDK_AutoSetup 命令。
●![]() Load Part –你可以使用這個功能鍵 3D 模型從 Solid Edge 加載到 RoboDK,但不會加載曲線或點等特徵。
Load Part –你可以使用這個功能鍵 3D 模型從 Solid Edge 加載到 RoboDK,但不會加載曲線或點等特徵。
●![]() Load Point(s) –你可以使用這個功能鍵來加載所有在 RoboDK 中選擇的曲線作為一個新的項目。所有選定的曲面都將用於計算曲線法線,這些法線都是作為定義機器人的接近軸的重要參數。
Load Point(s) –你可以使用這個功能鍵來加載所有在 RoboDK 中選擇的曲線作為一個新的項目。所有選定的曲面都將用於計算曲線法線,這些法線都是作為定義機器人的接近軸的重要參數。
●![]() Load Curve(s) – 你可以使用這個功能鍵來加載所有在 RoboDK 中選擇的點作為一個新對象。所有選定的表面都將用於計算點法線,這些法線都是作為定義機器人的接近軸的重要參數。
Load Curve(s) – 你可以使用這個功能鍵來加載所有在 RoboDK 中選擇的點作為一個新對象。所有選定的表面都將用於計算點法線,這些法線都是作為定義機器人的接近軸的重要參數。
●![]() Settings – 打開default Settings window.
Settings – 打開default Settings window.
Auto Setup和Load Curve(s)或Load Point(s)的最大分別是,Auto Setup會加載零件並創建新的曲線/點跟隨項目。而Using Load Curve(s) 或 Load Point(s)則會更快地加載曲線或加載點,並且只會更新 RoboDK 中現有的幾何特徵,並保持先前定義的設置。
您可以通過選擇Settings按鈕來更改默認的 RoboDK 插件設置。

●Object Name –設置將在 RoboDK 中加載的曲線/點對象的名稱。如果將這種設定留空,零件或裝配體文件的名稱就會被設定為其對象名稱。
●Override –如果名稱匹配,則覆蓋先前在 RoboDK 中加載的對象。
●Project Name –設置要使用的 RoboDK 項目/站(.RDK 文件)的名稱/路徑。如果文件已經加載,它將使用現有項目。如果 RoboDK 中打開的項目與文件名不匹配,你需要指定其專案的完整路徑。
●Robot Name –設置將在 RoboDK 中使用的機器人的名稱(如果您的專案中有超過 1 個機器人)。機器人名稱必須與 RoboDK 站樹中可見的名稱相匹配。如果將此值留空(默認),它就會使用專案中第一個或唯一可以用的機器人。
●Reference Name –設置reference frame的名稱以放置相對於機器人的路徑。該名稱應與 RoboDK 站點樹中的可見名稱一致。如果在設定中未提供其名稱,系統將使用激活中的active Reference Frame![]() 。
。
●Tool Name – 設定與機器人一起使用的跟隨路徑工具 (TCP) 名稱。該名稱需與 RoboDK 站點樹中的可見名稱一致。如果在設定中未提供其名稱,系統將使用激活中的Tool Frame![]() 。
。
●Program Name – 設置要生成的程序的名稱或路徑
●Load Path as Points – 點擊此選項以在 RoboDK 中將對象創建為點關注項目。這對於鑽孔等製造工程很有幫助。取消選中此選項以將路徑加載為曲線跟隨項目.
●Alternate Curve Directions -選中此選項以交替每次通過時移動方向(Zig-Zag 模式)。
●Invert Normals – 選中此選項以反轉計算的表面法線。這將翻轉機器人的工具方向。
●Use Solid Edge Theme in RoboDK – 使用Solid Edge主題啟動 RoboDK。這包括更改鼠標的 3D 導航和背景顏色。這些設置僅在 RoboDK 與 Rhino 一起啟動時適用,而這些設置可以在 RoboDK 的Tools-Options中更改。
●Communication Port – 設置與RoboDK通信的通信端口。如果使用不同的端口,你可以同時運行多個RoboDK 軟並使用不同的設置。當此值設置為 -1(默認值)時,軟件將使用默認端口 (20500)。
●Startup Options – 設定要在 RoboDK初次啟動時傳遞給它的參數。例如,要從背景中地啟動 RoboDK,您可以設置 '/NOSPLASH /NOSHOW /HIDDEN'。即使不顯示RoboDK,你可以也可以生成程序。請從以下文檔參考更多資料:命令行模式
●Chord Tolerance (mm) – 設置將曲線拆分為一組點的其精度。
●Mix Normals Tolerance (mm) –設置用於在多個曲面之間混合法線計算的距離公差。
●Export Format –選擇零件加載到 RoboDK
●Display all object curves – 顯示加載到 RoboDK 中的曲線(即使它們沒有被選擇)。您可以在 RoboDK(Tools-Options-Display-Display Curves)中更改此設置。
Buttons:
●Open RoboDK – Open a project in RoboDK... A new window will open with additional options.在 RoboDK 中打開一個專案... 一個包含其他特別選項的新窗口會被打開。
●Load Project … –加載你想要使用這個組件的 RoboDK 項目(RDK 文件)
●Open Library – 打開RoboDK 線上機器人庫.
●Set Defaults – 設置組件的默認設置。
●OK – 應用這些設置並關閉此窗口。你要點擊OK來儲存所有設置選項。不選擇確定將不會應用您更改的任何設置
本章節會介紹如冶使用 RoboDK 插件直接從 Siemens Solid Edge 生成機器人仿真和程序。
請參考以下視頻教程展示如何使用 Solid Edge 和 RoboDK 對機器人進行編程以遵循 5 軸刀具路徑來拋光復雜曲面。
本節介紹為 Solid Edge 手動設置 RoboDK 插件的步驟。如果默認情況下未能成功安裝Solid Edge 的 RoboDK 插件,請按照以下步驟進行手動安裝:
1.請確定你已經安裝了Siemens Solid Edge
2.請下載和安裝最新版本的RoboDK.
3.尋找以下檔案夾C:\RoboDK\Other\Plugin-SolidEdge\
然後以管理者權限執行Plugin_Install_RunAsAdministrator.bat

4.從主菜單中選擇Settings➔Add-Ins。

5.激活RoboDK plugin for Solid Edge,你就可以從Solid Edge的工具欄中見到RoboDK 工具欄。