机器人制造
本节介绍如何离线准备一个简单的RoboDK项目,以进行机器人加工。机器人加工单元必须至少具有一个机器人,一个工具和一个参考系(也称为坐标系,零件参考或基准)。有关在RoboDK中构建新工作站的更多信息,请参见入门部分。
注意:有关更多示例和教程,请参见机器人加工实例部分。
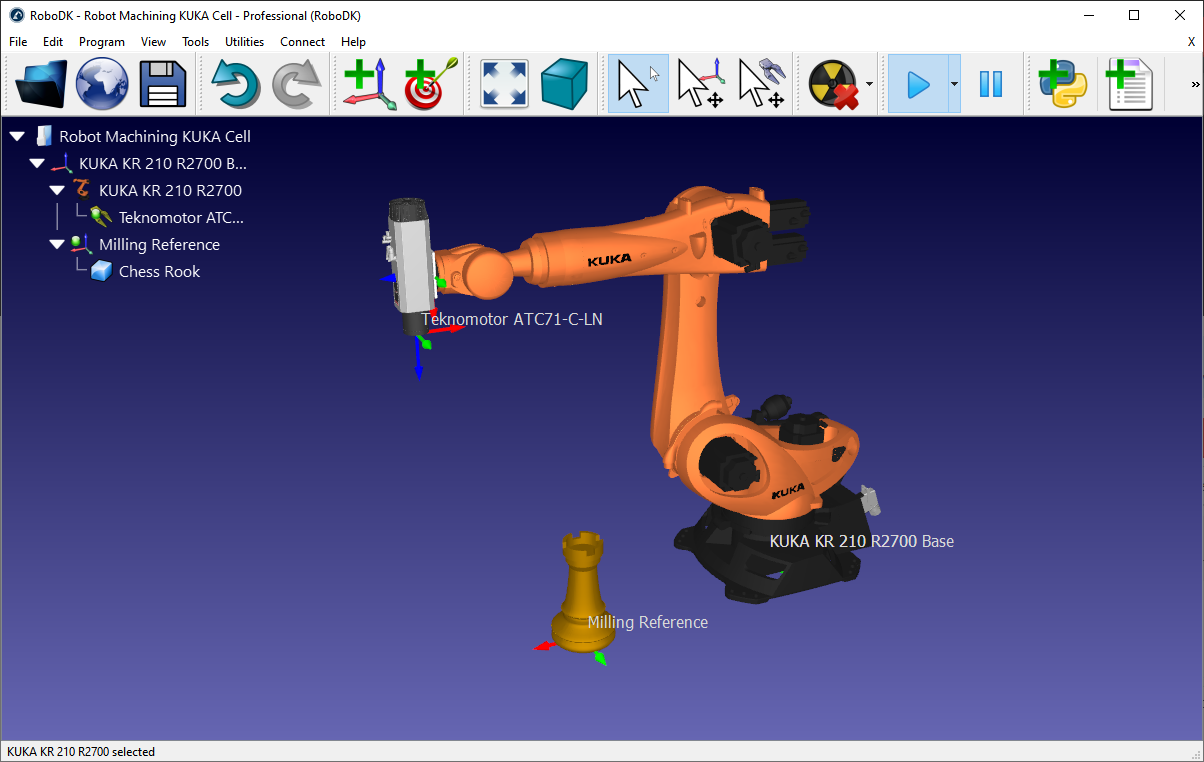
以下步骤显示了如何使用KUKA KR210机器人和Teknomotor铣削主轴准备机器人加工设置(此示例在库中以Sample-New-Project.rdk的形式提供)。
1-选择一个机器人:
a.选择文件➔![]() 打开在线图书馆。
打开在线图书馆。
b.使用过滤器按品牌,有效载荷等查找机器人
例如,选择KUKA KR210 R2700(有效载荷210 Kg,到达2.7 m)。
c.选择下载,该机械手应自动出现在主屏幕中。
2-选择一个工具:
a.在同一个在线图书馆中,按类型过滤➔工具。
b.下载主轴工具,例如Teknomotor ATC71-C-LN主轴。
c.该工具应自动安装到机器人上。
d.关闭在线库窗口。
提示:您可以将3D模型作为对象加载到RoboDK中,并将其转换为工具。任何通过将对象拖放到工作站树中的机器人,可以将对象转换为工具。更多信息这里。
3-添加参考框架:
a.选择机器人基座(名称为KUKA KR210 R2700 Base)。
b.选择程序➔![]() 添加参考框架。新的参考系将添加到机器人基座。
添加参考框架。新的参考系将添加到机器人基座。
c.双击参考并输入坐标:
XYZABC = [1500,1000,500,0,0,0](毫米度)
d.通过输入新名称或选择F2将新参考系重命名为“铣削参考”。
4-添加将用于机器人加工的对象(可选):
a.选择文件➔![]() 打开
打开
b.从RoboDK库中选择一个名为Object Chess Rook.sld的对象:
C:/ RoboDK /库
c.如果没有自动将对象拖放到“铣削参考”中,则将其拖放到“铣削参考”中
注意:不需要加载对象以从加工文件创建机器人仿真和机器人程序。但是,该对象可以帮助可视化设置并防止碰撞。
提示:推荐给莫ve参考框架而不是对象。一旦准备好由机器人运行机器人加工程序,参考框架将用于定位零件。
5-双击机器人以查看机器人面板(可选)。机械手面板显示活动工具和活动参考系。通过选择和更新工具和参考系,我们应该在机器人控制器中看到相同的坐标。默认情况下,Teknomotor主轴的刀架根部有TCP。工具(TCP)将具有一定的长度。在此示例中,我们将更新TCP以表示刀具的长度:
a.将工具X坐标(TCP)更新为375毫米。您将看到TCP沿轴移动。
b.(可选)您还可以创建第二个工具,并通过沿Z轴添加平移来定义相对于第一个工具的相对TCP。
c.关闭机器人面板窗口。
提示:有关定义设置以及校准工具和参考框架的更多信息,请参见定义工具(TCP)和定义参考系部分。

注意:RoboDK站存储在一个文件(RDK文件)中。不需要保留机械手文件,工具和对象的单独副本,因为它们与RDK文件一起保存。