KUKA机器人
RoboDK支持库卡(KUKA)机器人控制器KRC2以及更新版本,包括KUKA KRC3与KRC4控制器。本部分内容是基于KRC4控制器。KUKA KRC4机器人控制器使用Microsoft Embedded Windows 7操作系统。更早的版本,例如KRC2,使用Windows 95。机器人示教器显示“HMI”,为KUKA开发的基于Windows的程序,作为用户操作机器人的界面。
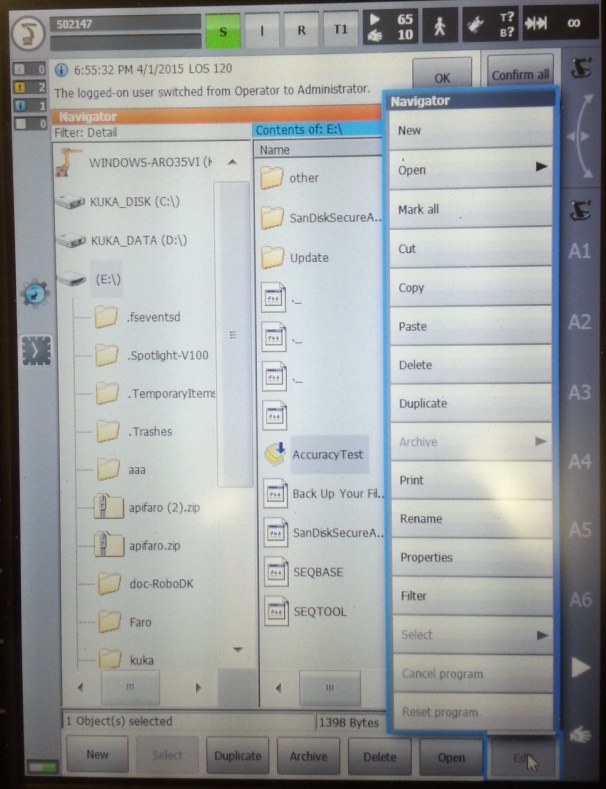
下面的内容演示了一个典型操作:使用KUKA机器人示教器将RoboDK生成的程序传输至机器人。
根据以下步骤加载USB盘中的机器人程序:
1.将USB盘插入机器人控制器(较示教器连接更快速)
2.如果未显示USB驱动盘,需要进入Administrator模式
3.选择USB盘内的文件
4.选择Edit➔Copy
5.在KRC内选择一个文件夹
6.选择Edit➔Paste

通过以下步骤在KUKA KRC控制器上运行一个机器人程序:
1.在KRC内存中选择一个程序
2.在示教器屏幕上选择Select
3.选择按钮 “R”(屏幕顶部)与Reset program
4.点击示教器屏幕上的绿色“Play”按钮开始运行程序


通过以下步骤新建或者修改机器人工具(TCP,即KUKA机器人编程手册中的$BASE):
1.选择MENU➔Start-up➔Calibrate➔Tool
2.选择一个工具并编辑或者获取TCP的X,Y,Z 位置。


通过以下步骤获取机器人关节坐标值:
1.选择MENU➔Display➔Actual position
2.选择Joints模式并使用左边的列获得关节坐标值


示教器上的某些菜单需要 “Administrator”权限。以下步骤介绍如何进入“Administrator”模式:
1.选择MENU➔Configuration➔User group
2.选择Administrator(或其他)
3.需要时输入密码(默认密码为“kuka”)


机器人驱动器为离线编程(生成离线程序后传输至机器人并运行)提供新的可能。使用机器人驱动器,可以直接使用真机机器人运行仿真(在线编程)。更多信息请参考Robot Drivers部分。
通过PC电脑可以建立RoboDK与KUKA机器人的连接,并使用RoboDK自动控制机器人运动。可以使用RoboDK中的Run on robot选项在线调试程序,该选项通过标准Ethernet(TCP/IP)连接实现。
通过以下步骤为KUKA机器人设置RoboDK驱动器:
1.连接鼠标(可选,但是非常推荐)
可以为示教器或者机器人控制器连接USB设备(无需重启)
或者,可以建立远程桌面连接。
还可以使用示教器触屏上的虚拟键盘完成这些步骤。
2.(可选)连接一个键盘与外部显示器(DVI)
如果连接了外部显示器,需要重启机器人控制器。
如果连接了显示器、鼠标与键盘,此时屏幕上会出现KukaUser用户的Windows登陆界面。输入以下信息:
用户名: kukauser (或者KukaUser)
密码: 68kuka1secpw59

3.可以使用KUKA按钮![]() 在KUKA HMI程序的左上角打开主菜单:
在KUKA HMI程序的左上角打开主菜单:
a.![]() KUKA➔Configuration➔User group➔选择Administrator(密码:kuka)
KUKA➔Configuration➔User group➔选择Administrator(密码:kuka)
b.![]() KUKA➔Start-up➔Service➔Minimize HMI(Windows登陆界面将会出现)
KUKA➔Start-up➔Service➔Minimize HMI(Windows登陆界面将会出现)
4.将KUKAVARPROXY文件夹拷贝至Windows桌面(或者保存于控制器PC的其他位置)
5.为KUKAVARPROXY服务器(HMI)解锁端口号7000:
a.选择HMI
b.![]() KUKA➔Start-up➔Network configuration➔Advanced
KUKA➔Start-up➔Network configuration➔Advanced
c.NAT➔Add port➔Port number 7000
d.设置准许协议:tcp/udp
6.在机器人控制器上运行KUKAVARPROXY.EXE程序(在Windows中运行)
7.(推荐)以下步骤将于机器人控制器重启时自动运行驱动器:
a.为KUKAVARPROXY.EXE文件建立一个快捷方式
b.选择Windows START➔All programs➔Right click startup➔Open
c.将快捷方式粘贴在startup文件夹中
此时KUKAVARPROXY服务器设置完成。此程序可以一直安全运行,它负责KUKA控制器与远程PC之间全局变量的交换。
下面的步骤设置负责机器人运动的主程序:
1.将以下全局变量添加至声明中:
找到并修改文件“KRC\R1\STEU\$config.dat”(或者KRC2控制器中的“KRC\R1\System\$config.dat”)。可以通过Windows C盘下的路径“C:\KRC\ROBOTER\KRC\”找到文件夹“KRC\R1\”:
INT COM_ACTION=0
INT COM_ACTCNT=0
REAL COM_ROUNDM=0
REAL COM_VALUE1=0
REAL COM_VALUE2=0
REAL COM_VALUE3=0
REAL COM_VALUE4=0
DECL E6AXIS COM_E6AXIS
DECL FRAME COM_FRAME
DECL POS COM_POS
2.将RoboDK提供的SRC程序(RoboDKsynch.src)拷贝至文件夹KRC\R1。
3.手动运行“RoboDKsynch.src”程序。此时机器人将作为服务器响应来自PC电脑的运动指令。
假如KUKAVARPROXY程序在机器人控制器上运行,而RoboDKsynch.src程序不运行,RoboDK仍然可以在任何时候读取机器人的关节值。