Universal Robots优傲机器人
本部分内容可选,用于提高离线编程中的位置准确性。本部分介绍如何在RoboDK中输入针对每台UR机器人的唯一运动参数,以便更准确地仿真与生成机器人程序。
UR机器人的运动参数根据每台机器人的出厂标定结果,包括6个长度参数,这些参数显示了实际机器人与仿真标准数据的差异。针对机器人的编程方式,这些数据有可能很重要。
每台UR机器人的准确运动参数可以通过以下几个步骤在RoboDK中设置:
1.在机器人控制器上的URControl文件夹中找到urcontrol.conf.[UR3/UR5/UR10]文件。此文件可以使用USB盘或者通过FTP传输(如previous部分介绍)的方式获得。
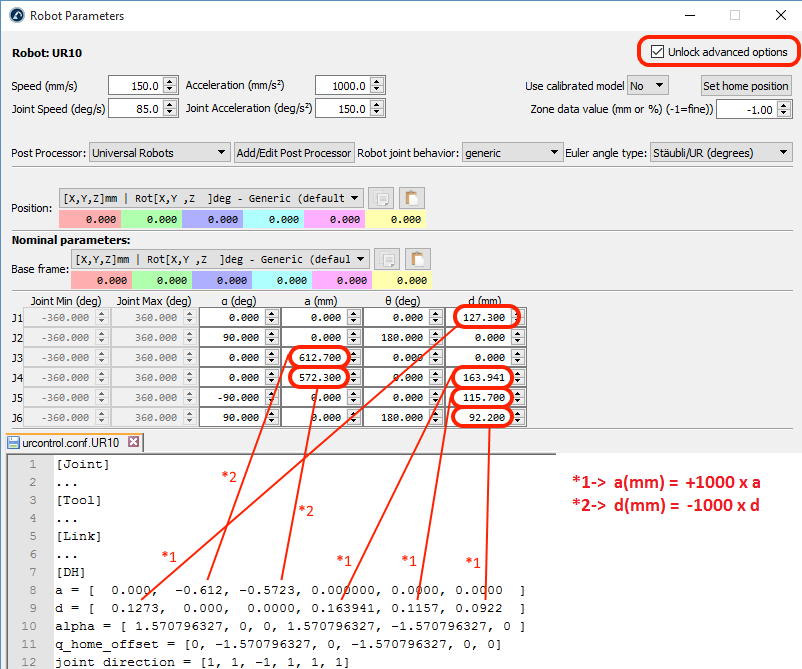
2.在文本编辑器中打开该文件,并找到[DH] 数据,如图所示。
3.在RoboDK中双击机器人,选择“Parameters”,打开机器人参数窗口。
4.点击“Unlock advanced options”,可以编辑UR机器人的6个长度参数。
5.将urcontrol.conf.ur10文件中的6个数值输入RoboDK中的DH表格中,如图中的红色标识部分。
完成以上步骤后,右键单击机器人并选择Save as .robot,这些参数将与机器人文件一起保存。
每台UR机器人的运动参数都有差别,这是由于出厂前针对每台机器人的标定,对机器人实际物理参数做出了补偿。其他品牌例如库卡(KUKA),ABB,安川(Motoman)与发那科(Fanuc)等提供Absolute Accuracy选项,用户可付费购买厂家标定服务。一般来说,Absolute Accuracy标定服务将补偿40个或更多标定参数。