Universal Robots优傲机器人
可以使用RoboDK通过两种方式给优傲(UR)机器人编程:
1.使用用户图形界面(URP文件):
用户通过机器人示教器的触屏编写URP程序。一个URP程序可以有一个或多个SCRIPT文件作为子程序。在运行程序时,机器人控制器将URP程序转化为SCRIPT程序并执行。
2.脚本编程(SCRIPT文件):
脚本程序使用UR Script编程语言。就像任何其他编程语言,UR Script有变量、类型、流程控制声明,函数等等。另外,UR Script还有专门控制I/O与机器人运动的内置变量与函数。
RoboDK是一款为工业机器人设计的仿真器与离线编程软件。RoboDK可以为UR机器人生成SCRIPT与URP文件。另外,当机器人与电脑连接时,可以使用RoboDK直接运行机器人程序execute programs on the robot。
可以在RoboDK仿真器中导入SCRIPT文件,仿真已有的SCRIPT程序、修改后重新导出该程序。
UR机器人示教器的图形用户界面软件叫做PolyScope(如下图所示)。更多信息请参考URScript 编程语言手册。
可以在RoboDK仿真器中输入机器人IP地址,并直接在真机上运行机器人程序。还可以通过FTP传输程序到机器人。
可以通过UR机器人示教器主屏幕上的About菜单,查看机器人的IP地址。

通过Ethernet将机器人连接至电脑(直接连接或者通过网络)。使用Ping可以测试网络连接是否成功。
机器人驱动器为离线编程(生成离线程序后传输至机器人并运行)提供新的可能。使用机器人驱动器,可以直接使用真机机器人运行仿真(在线编程)。更多信息请参考Robot Drivers部分。
当PC电脑与机器人建立连接后,可以在RoboDK直接在真机上运行机器人程序。
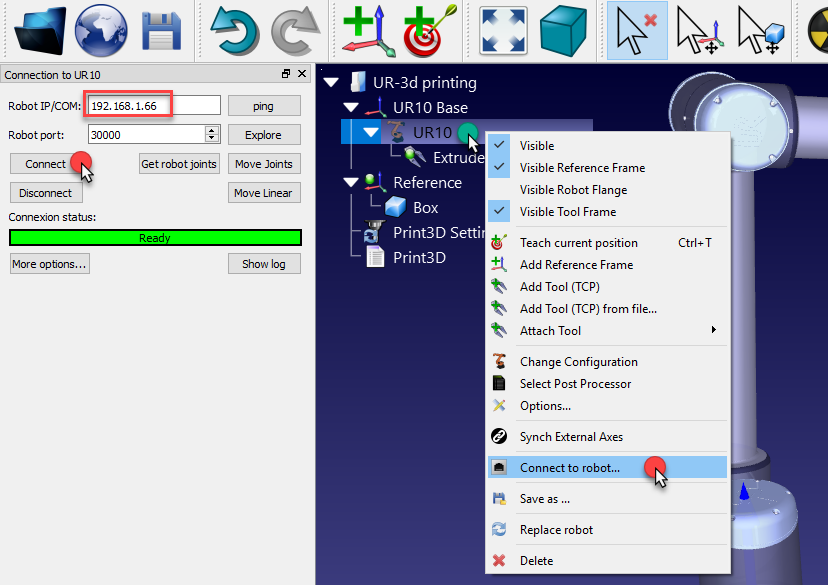
1.在RoboDK中右键点击机器人
2.选择:![]() Connect to robot…
Connect to robot…
3.输入机器人IP地址
4.选择Connect
如果连接成功,将出现绿色的Ready信息。
在连接菜单中可以使用Get robot joints, Move Joints与Move Linear等指令移动机器人。
可以使用两种办法通过PC电脑,直接运行机器人程序:
1.使用Run on robot在机器人真机上逐条运行指令并在RoboDK中得到反馈(在线编程):
此方法使用机器人作为服务器,RoboDK逐条发送指令到机器人控制器上,如同发送于仿真器中执行。此选项可用于调试程序。
a.右键点击仿真程序(如下图中的Print3D程序)
b.选择Run on robot
c.双击该程序并开始运行(或者右键单击后选择Run)
当选中此选项后,每次双击仿真程序都将连接到机器人真机(或者右键单击后选择Run)。
这些操作在RoboDK API部分也有介绍,还可以将机器人编程集成于其他应用中。RoboDK的应用编程接口(API)可用于Python,C#及其他编程语言环境。

2.使用Send program to robot生成完整的机器人程序,发送至机器人并在真机上开始运行(机器人离线编程):
a.右键点击仿真程序(如下图中的Print3D程序)
b.选择Send program to robot (Ctrl+F6)
在RoboDK安装自带Library中有一个用于实时监控UR机器人状态的宏。选择:
1.选择File➔Open
2.打开位于C:/RoboDK/Library/Macros/的宏UR_ActivateMonitoring.py文件。工作站中将自动添加该 Python项目。
3.确保机器人连接参数中正确设置了机器人的IP地址。
4.双击宏并开始实时监控。
仿真器会自动更新机器人的位置,并随着机器人真机的运动添加机器人目标。可以实时查看机器人速度,加速度,马达电流等。
当机器人程序在RoboDK中调试成功后,可以生成SCRIPT,URP等程序。这些程序可以在UR机器人控制器上运行。按照以下步骤在RoboDK中根据仿真生成一个SCRIPT与一个URP程序:
1.右键点击仿真程序(如下图中的Print3D程序)
2.选择Generate robot program F6
当机器人程序生成后,该程序将自动在文本编辑器中显示。可以通过Tools➔Options➔Program菜单修改这个操作。

可以通过FTP或者USB盘传输SCRIPT与URP文件。
以下内容介绍了在机器人上运行SCRIPT程序的步骤。运行URP程序则不需要这些步骤:
1.在示教器的主屏幕上选择Program Robot
2.选择Empty Program
3.选择Structure标签
4.选择Advanced标签
5.选择Script code
6.选择File(如图所示)
7.选择RoboDK生成的脚本文件
8.选择播放图标运行程序
9.选择File➔Save 保存修改内容
10.最后,运行程序




机器人与电脑建立连接后,可以使用USB盘或者FTP将RoboDK生成的SCRIPT程序(可以通过F6键生成程序)传输到机器人。
我们建议使用系统的默认路径,或者在RoboDK的安装文件夹内安装FileZilla Client,这样RoboDK可以自动检测到该FTP程序:
C:\RoboDK\FileZilla FTP Client\
使用FTP传输:
1.右键单击机器人
2.选择Connect to robot...
3.选择Explore。软件自动打开FileZilla Client(用于FTP传输)
4.选择File➔Site Manager...
5.选择Universal Robot sample,在Predefined Sites中
6.选择Duplicate,将复制UR机器人的设置
7.输入机器人的IP地址(本范例中,192.168.1.66)
8.选择Connect.
9.传输已生成的SCRIPT文件
通常,SCRIPT程序将保存在机器人控制器的 /Programs/ 文件夹中。

本部分内容可选,用于提高离线编程中的位置准确性。本部分介绍如何在RoboDK中输入针对每台UR机器人的唯一运动参数,以便更准确地仿真与生成机器人程序。
UR机器人的运动参数根据每台机器人的出厂标定结果,包括6个长度参数,这些参数显示了实际机器人与仿真标准数据的差异。针对机器人的编程方式,这些数据有可能很重要。
每台UR机器人的准确运动参数可以通过以下几个步骤在RoboDK中设置:
1.在机器人控制器上的URControl文件夹中找到urcontrol.conf.[UR3/UR5/UR10]文件。此文件可以使用USB盘或者通过FTP传输(如previous部分介绍)的方式获得。
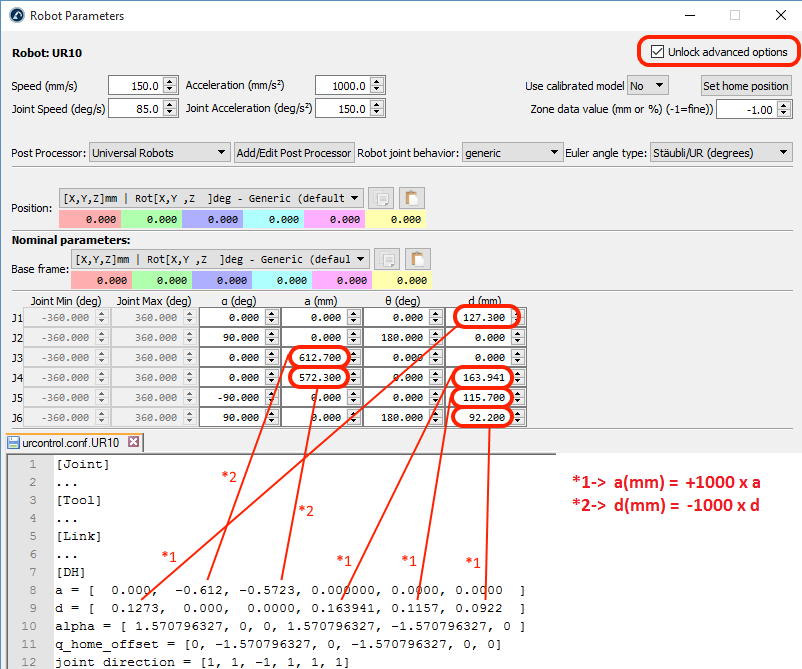
2.在文本编辑器中打开该文件,并找到[DH] 数据,如图所示。
3.在RoboDK中双击机器人,选择“Parameters”,打开机器人参数窗口。
4.点击“Unlock advanced options”,可以编辑UR机器人的6个长度参数。
5.将urcontrol.conf.ur10文件中的6个数值输入RoboDK中的DH表格中,如图中的红色标识部分。
完成以上步骤后,右键单击机器人并选择Save as .robot,这些参数将与机器人文件一起保存。
每台UR机器人的运动参数都有差别,这是由于出厂前针对每台机器人的标定,对机器人实际物理参数做出了补偿。其他品牌例如库卡(KUKA),ABB,安川(Motoman)与发那科(Fanuc)等提供Absolute Accuracy选项,用户可付费购买厂家标定服务。一般来说,Absolute Accuracy标定服务将补偿40个或更多标定参数。