Verwendung des Controllers
Sie sollten Ihren Controller zunächst mit dem Gerät verbinden, auf dem Sie RoboDK verwenden. Das Add-in ordnet bestimmte Roboterbewegungen und Einstellungen den Standard-Gamepad-Eingaben zu. Die Standardzuordnung wurde für einen Xbox One-Controller erstellt.
Hinweis: Das Game-Controller-Add-in unterstützt mehrere Controller. Sie können Ihren realen Roboter auch mithilfe von RoboDK-Drivern steuern.
Bewegungssteuerung
Klicken Sie auf das Symbol „Game Controller starten“ in der Symbolleiste oder gehen Sie zu „Verbinden“ – „Game Controller“ – „Game Controller starten“. Dadurch wird das Add-in gestartet und es wird automatisch versucht, den angeschlossenen Controller zu erkennen. Klicken Sie erneut auf das Symbol „Game Controller starten“, um das Add-in zu beenden.
Hinweis: Statusaktualisierungen werden in der Statusleiste von RoboDK angezeigt, die sich am unteren Bildschirmrand befindet.
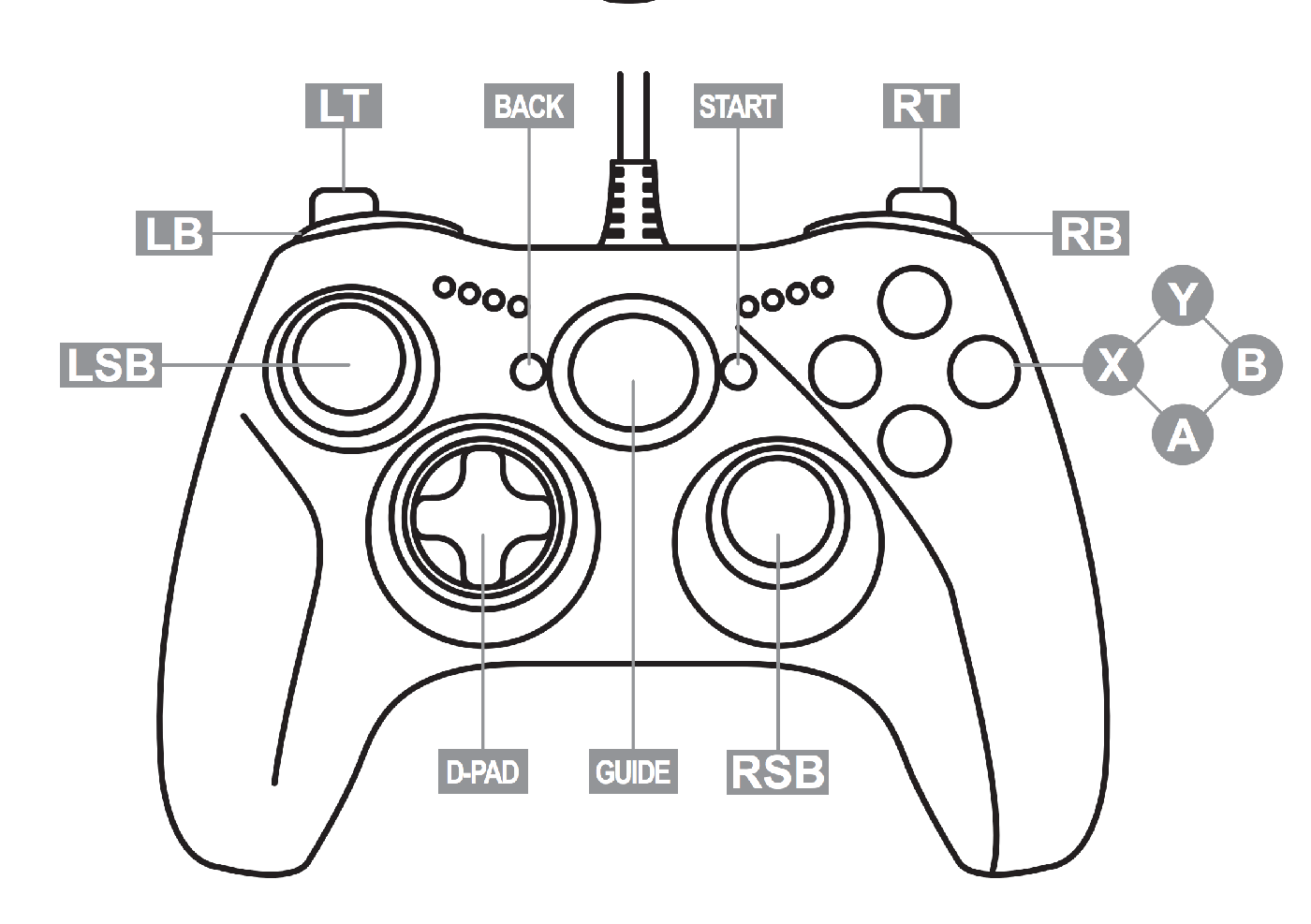
Um den Roboter zu bewegen, müssen Sie eine Achse auswählen und die Bewegung über das Steuerkreuz ausführen.
1.X-Achse auswählen: Halten Sie die X-Taste auf Ihrem Controller gedrückt.
2.Y-Achse auswählen: Halten Sie die Y-Taste auf Ihrem Controller gedrückt.
3.Z-Achse auswählen: Halten Sie die B-Taste auf Ihrem Controller gedrückt.
4.Bewegen: Halten Sie eine Achstaste gedrückt und bewegen Sie den Roboter mit dem Steuerkreuz nach oben oder unten entlang der ausgewählten Achse.
Umschalter
Das Game-Controller-Add-in bietet einige Umschalt-Tasten, um das Verhalten anzupassen.
Weitere Optionen zur Steuerung der Bewegung Ihres Roboters sind:
1.Translation vs. Rotation: Drücken Sie die linke Stick-Taste (LSB), um zwischen der linearen Bewegung des Roboters (mm) und seiner Rotation (Grad) umzuschalten. Standardmäßig verwenden wir die Translation (mm).
2.MoveJ vs. MoveL: Drücken Sie die rechte Stick-Taste (RSB), um zwischen Gelenkbewegung (MoveJ) und linearer Bewegung (MoveL) umzuschalten. Die Standard-Bewegungsanweisung ist MoveJ.
3.Schrittweite: Verwenden Sie das Steuerkreuz nach links oder rechts, um die Schrittweite der Bewegung zu verringern oder zu erhöhen.
4.Ausgangsposition: Drücken Sie beide Bumper (LB + RB) gleichzeitig, während Sie die Sicherheitsvorrichtung aktivieren, um den Roboter in seine Ausgangsposition zurückzubringen.