Game Controller
Einführung in das Game-Controller-Add-in
Das Game-Controller-Add-in für RoboDK ist ein effizientes Werkzeug, mit dem Sie einen Roboter manuell über ein Standard-Gamepad (z. B. einen Xbox-Controller) steuern können. Dieses Add-in eignet sich ideal zum schnellen Einlernen von Zielen, zum Testen der Reichweite des Roboters oder zum Demonstrieren von Roboterbewegungen in einer simulierten oder realen Umgebung.
Installation
Sie können das Game Controller Add-in über die RoboDK Online-Bibliothek installieren. Eine weitere Möglichkeit, dies über die RoboDK-Software selbst zu tun, besteht darin, unter „Tools“ – „Add-in Manager“ das Game Controller Add-in zu aktivieren.
Hinweis: Die zweite Methode funktioniert möglicherweise in einigen älteren Versionen der Software nicht. Stellen Sie sicher, dass Sie die neueste Version installiert haben
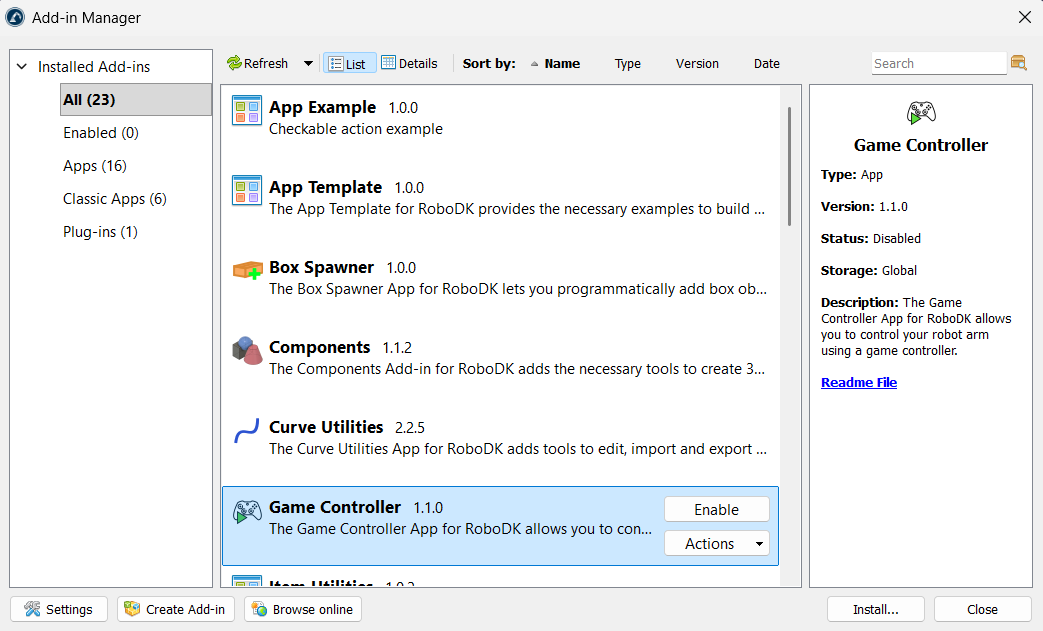
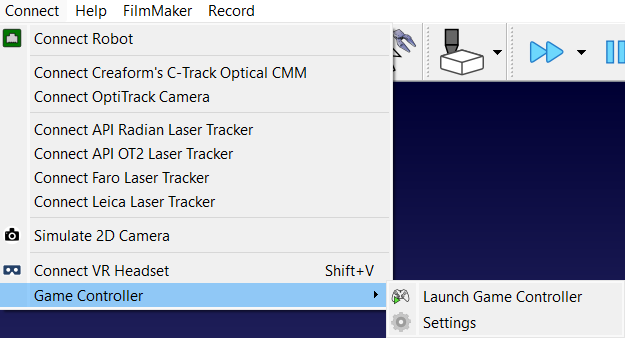
Nach der Installation finden Sie die Optionen für den Game Controller im Menü „Connect“. Außerdem finden Sie das Symbol „Launch Game Controller“ in der Symbolleiste.
Verwendung des Controllers
Sie sollten Ihren Controller zunächst mit dem Gerät verbinden, auf dem Sie RoboDK verwenden. Das Add-in ordnet bestimmte Roboterbewegungen und Einstellungen den Standard-Gamepad-Eingaben zu. Die Standardzuordnung wurde für einen Xbox One-Controller erstellt.
Hinweis: Das Game-Controller-Add-in unterstützt mehrere Controller. Sie können Ihren realen Roboter auch mithilfe von RoboDK-Drivern steuern.
Bewegungssteuerung
Klicken Sie auf das Symbol „Game Controller starten“ in der Symbolleiste oder gehen Sie zu „Verbinden“ – „Game Controller“ – „Game Controller starten“. Dadurch wird das Add-in gestartet und es wird automatisch versucht, den angeschlossenen Controller zu erkennen. Klicken Sie erneut auf das Symbol „Game Controller starten“, um das Add-in zu beenden.
Hinweis: Statusaktualisierungen werden in der Statusleiste von RoboDK angezeigt, die sich am unteren Bildschirmrand befindet.
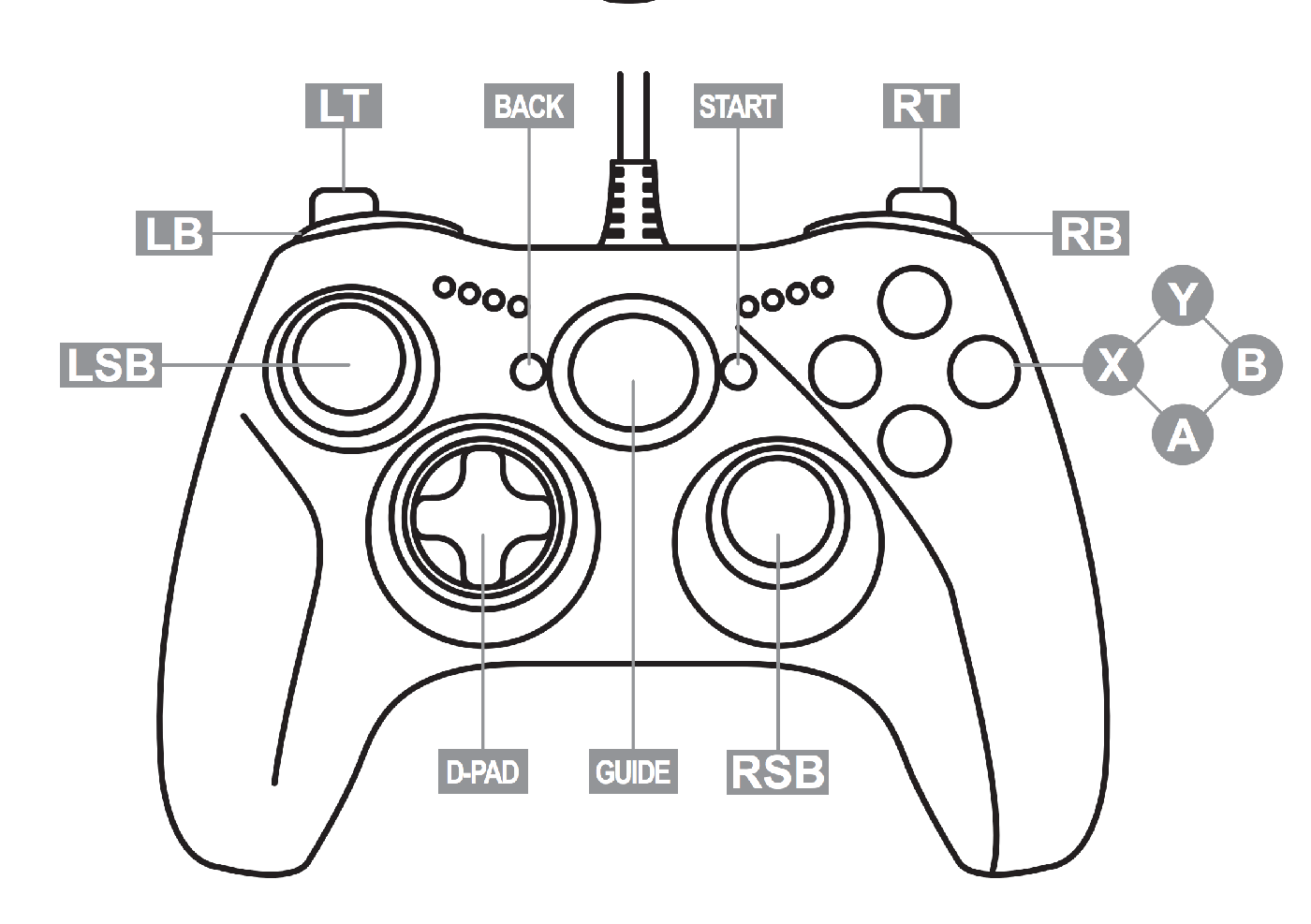
Um den Roboter zu bewegen, müssen Sie eine Achse auswählen und die Bewegung über das Steuerkreuz ausführen.
1.X-Achse auswählen: Halten Sie die X-Taste auf Ihrem Controller gedrückt.
2.Y-Achse auswählen: Halten Sie die Y-Taste auf Ihrem Controller gedrückt.
3.Z-Achse auswählen: Halten Sie die B-Taste auf Ihrem Controller gedrückt.
4.Bewegen: Halten Sie eine Achstaste gedrückt und bewegen Sie den Roboter mit dem Steuerkreuz nach oben oder unten entlang der ausgewählten Achse.
Umschalter
Das Game-Controller-Add-in bietet einige Umschalt-Tasten, um das Verhalten anzupassen.
Weitere Optionen zur Steuerung der Bewegung Ihres Roboters sind:
1.Translation vs. Rotation: Drücken Sie die linke Stick-Taste (LSB), um zwischen der linearen Bewegung des Roboters (mm) und seiner Rotation (Grad) umzuschalten. Standardmäßig verwenden wir die Translation (mm).
2.MoveJ vs. MoveL: Drücken Sie die rechte Stick-Taste (RSB), um zwischen Gelenkbewegung (MoveJ) und linearer Bewegung (MoveL) umzuschalten. Die Standard-Bewegungsanweisung ist MoveJ.
3.Schrittweite: Verwenden Sie das Steuerkreuz nach links oder rechts, um die Schrittweite der Bewegung zu verringern oder zu erhöhen.
4.Ausgangsposition: Drücken Sie beide Bumper (LB + RB) gleichzeitig, während Sie die Sicherheitsvorrichtung aktivieren, um den Roboter in seine Ausgangsposition zurückzubringen.
Sicherheitsfunktionen
Das Add-in enthält einen obligatorischen Sicherheitsmechanismus, um unbeabsichtigte Bewegungen zu verhindern.
Zu den unbeabsichtigten Bewegungen gehören die folgenden:
1.Sicherheitsauslöser: Sie müssen den rechten Trigger (RT) gedrückt halten, um eine Bewegung des Roboters zu ermöglichen. Wenn der Trigger losgelassen wird, bewegt sich der Roboter nicht und die App zeigt folgende Meldung an:
Bitte drücken Sie den Sicherheitsauslöser!
2.Konfigurationswarnung: Das Skript prüft, ob die neue Bewegung eine Änderung der Roboterkonfiguration verursacht (z. B. Handgelenksdrehung). Wird eine Änderung festgestellt, wird die Bewegung blockiert und die folgende Warnung angezeigt, um unerwartetes Verhalten zu verhindern:
Roboterkonfiguration geändert. Dies kann zu unerwarteten Bewegungen führen! Bitte bewegen Sie den Roboter über RoboDK oder versuchen Sie es mit einem anderen Befehl.
3.Erreichbarkeitsprüfung: Das System validiert die Bewegung mithilfe der inversen Kinematik (IK). Wenn das Ziel außer Reichweite oder in der Nähe einer Singularität liegt, werden die folgenden Meldungen angezeigt:
Ziel unerreichbar. Versuchen Sie es mit MoveJ oder einem anderen Befehl.
Keine Roboterlösung! Die neue Position ist zu weit entfernt, außerhalb der Reichweite oder nahe einer Singularität.
Geräte- und Roboterhandhabung
Das Add-in enthält Logik zur Verwaltung mehrerer Geräte oder Roboter innerhalb der Station:
1.Mehrere Steuerungen: Wenn mehr als eine Steuerung an den PC angeschlossen ist, zeigt das Add-in eine Meldung an, dass mehrere Steuerungen gefunden wurden, und verwendet standardmäßig die zuerst erkannte.
2.Mehrere Roboter: Wenn die Station mehr als einen Roboter enthält, fordert das Add-in den Benutzer auf, einen Roboter aus einer Liste auszuwählen. Ist nur ein Roboter vorhanden, wird dieser automatisch ausgewählt, ohne den Benutzer zu fragen.
Hinweis: Wenn kein Controller gefunden wird oder wenn die Verbindung zum Controller während des Betriebs unterbrochen wird, zeigt das Add-in eine Meldung an und wird beendet. Ebenso müssen Sie, falls sich kein Roboter in der Station befindet, einen laden, bevor Sie das Programm ausführen.
Simulation vs. echter Roboter
Das Add-in kann sowohl für die Offline-Simulation als auch für die Live-Robotersteuerung verwendet werden:
1.Simulationsmodus: Der Standardmodus zum sicheren Testen von Bewegungen innerhalb der RoboDK-Station.
2.Echter Roboter-Modus: Um einen physischen Roboter anzusteuern, verbinden Sie ihn über „Connect-Connect Robot“. Das Add-in fragt Sie, ob Sie den echten Roboter betreiben möchten, anstatt im Simulationsmodus zu bleiben. Wenn Sie auf „Ja“ klicken, werden Sie aufgefordert, die IP-Adresse des Roboters einzugeben; anschließend können Sie auf „Verbinden“ klicken.
Hinweis: Stellen Sie sicher, dass die Robotergeschwindigkeiten in den Roboterparametern auf ein sicheres Niveau eingestellt sind, bevor Sie fortfahren.
Hinweis: Wenn kein Controller gefunden wird oder die Verbindung zum Controller während des Betriebs unterbrochen wird, zeigt das Add-in eine Meldung an und wird beendet. Ebenso müssen Sie, falls sich kein Roboter in der Station befindet, einen laden, bevor Sie das Programm ausführen.
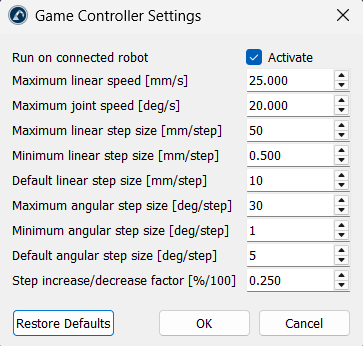
Einstellungen
Weitere Einstellungen zur Anpassung finden Sie unter „Connect-Game Controller-Settings“.