IsaacSim Bridge Add-in
Das IsaacSim Bridge Add-in für RoboDK ermöglicht es dem Benutzer, seine IsaacSim-Szene mit RoboDK zu verbinden, wodurch die Verbindung zu einem realen Roboter vereinfacht oder Roboterprogramme entsprechend den jeweiligen Anforderungen generiert werden können. Die IsaacSim-Erweiterung implementiert auch den RRT Motion Planner, um den Export einer kollisionsfreien Bahn aus IsaacSim in ein RoboDK-Programm zu erleichtern.
RoboDK erweitert die Funktionen zur Nachbearbeitung für Industrieroboter in Isaac Sim und generiert produktionsreife Roboterprogramme für 1200 Industrieroboter von 80 Roboterherstellern.
Installieren Sie
Bitte installieren Sie das Isaac Sim Bridge-Add-in aus der Add-in-Bibliothek. Das IsaacSim Bridge-Add-in ist in der RoboDK-Software standardmäßig nicht aktiviert.
Um die Erweiterung in IsaacSim zu installieren, müssen Sie zunächst die RoboDK-Python-API-Module installieren. Befolgen Sie dazu bitte die folgenden Schritte:
1.Öffnen Sie den IsaacSim Selector.
2.Klicken Sie auf „Im Terminal öffnen“.
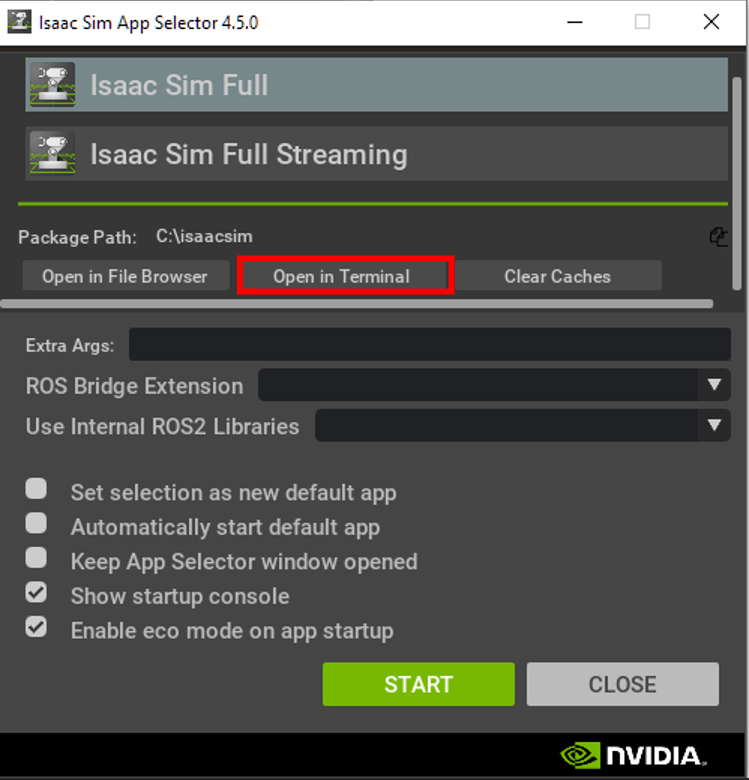
Führen Sie den folgenden Befehl aus: pip install RoboDK
Nach der Installation des RoboDK-Pakets können Sie die Erweiterung in IsaacSim installieren, indem Sie die folgenden Schritte ausführen.
1.Installieren Sie das Add-in in RoboDK.
2.Öffnen Sie den Speicherort des Add-Ins in Ihrem Dateimanager.
3.Kopieren Sie den Ordner „RoboDK.Bridge“. Dieser enthält die Erweiterung für IsaacSim.
4.Fügen Sie ihn in den Ordner „extsUser“ Ihrer IsaacSim-Installation ein.
5.Starten Sie IsaacSim und öffnen Sie den Erweiterungsmanager.
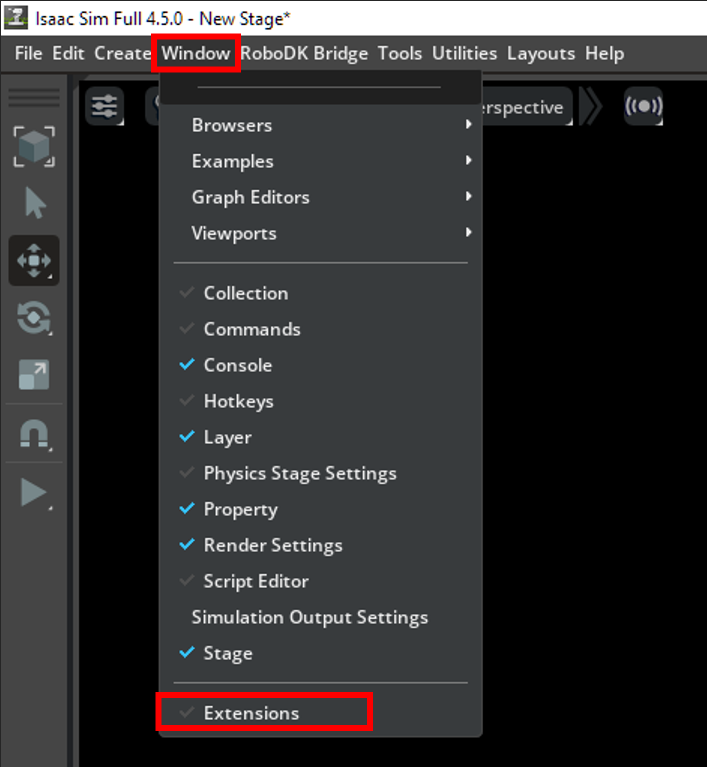
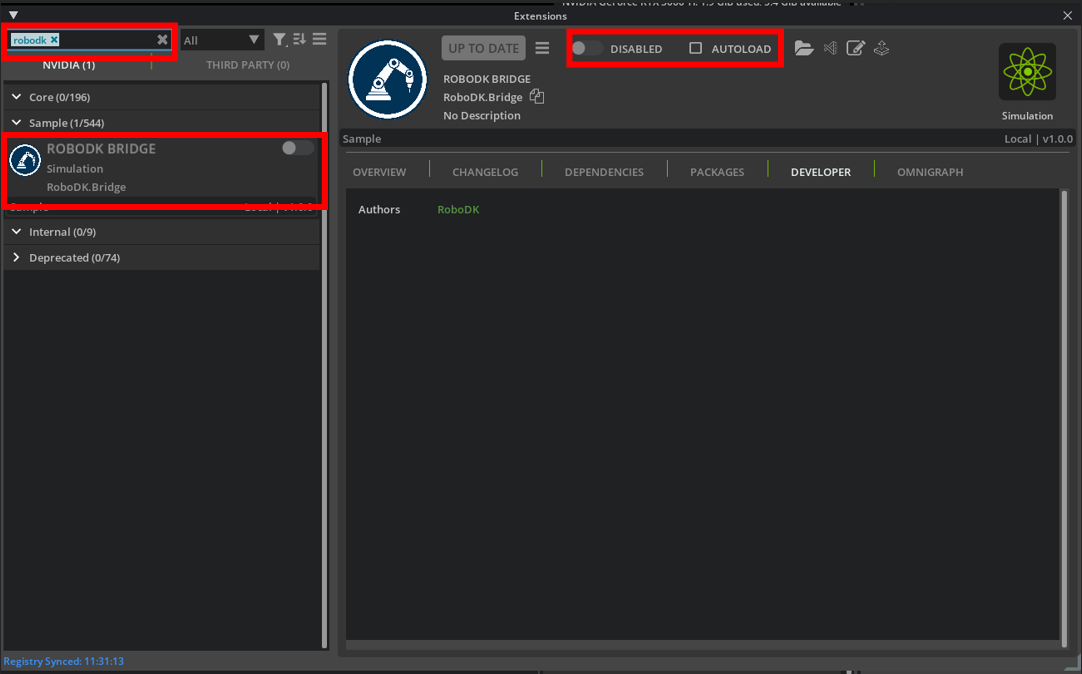
6.Suchen Sie in der Suchleiste nach RoboDK.
7.Aktivieren Sie die Erweiterung und optional auch das automatische Laden.
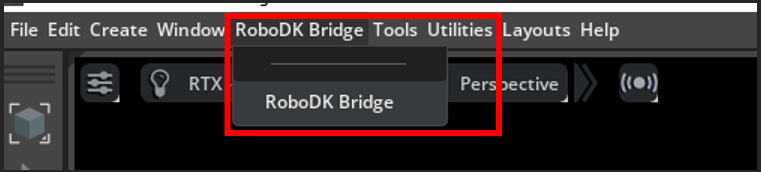
8.Die RoboDK-Brücke sollte nun in Ihrer Symbolleiste in IsaacSim angezeigt werden und kann geöffnet werden.
IsaacSim-Bridge-Funktionen
Dieser Abschnitt zeigt die grundlegenden Funktionen des IsaacSim Bridge Add-Ins in IsaacSim.
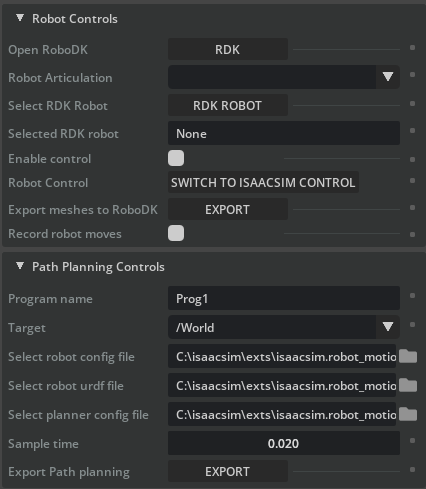
Das Fenster „IsaacSim Bridge Extension“ enthält folgende Funktionselemente:
1.Robotersteuerung
a.RoboDK öffnen: Öffnet RoboDK, wenn es nicht geöffnet ist, oder stellt eine Verbindung zur aktuell ausgeführten Instanz von RoboDK her, wenn es geöffnet ist. Dies ist erforderlich, damit die Erweiterung funktioniert.
b.Roboterartikulation: Wählen Sie die innerhalb von IsaacSim zu verwendende Artikulation aus.
c.RDK-Roboter auswählen: Wählen Sie den Roboter innerhalb der RoboDK-Station aus, der verwendet werden soll.
d.Ausgewählter RDK-Roboter: Zeigt den Namen des ausgewählten Roboters an.
e.Steuerung aktivieren: Aktiviert die Roboterkommunikation zwischen der IsaacSim-Szene und der RoboDK-Station.
f.Robotersteuerung: Wählen Sie den Referenzroboter aus, der als zuzuordnender Roboter verwendet werden soll. Wenn die Option „Zu IsaacSim-Steuerung wechseln“ angezeigt wird, fungiert RoboDK als Master und die Roboterartikulation innerhalb von IsaacSim folgt der Pose des ausgewählten RoboDK-Roboters.
g.Exportieren von Meshes nach RoboDK: Konvertieren Sie Mesh-Objekte in der IsaacSim-Szene in 3D-Mesh-Dateien und laden Sie diese in die RoboDK-Station. Der Ursprung des konvertierten Objekts befindet sich an der Basis der Station, wird jedoch so versetzt, dass die aktuelle Position mit seiner Position in der IsaacSim-Szene übereinstimmt. Jedes der Mesh-Objekte aus IsaacSim wird zu einem eigenen Objekt in der RoboDK-Station und kann verschoben werden.
h.Roboterbewegungen aufzeichnen: Zeichnet alle Bewegungen des IsaacSim-Roboters auf und fügt sie zu einem Programm in RoboDK hinzu. Dies ist nützlich, wenn Sie ein Programm in IsaacSim haben, das Sie nach RoboDK exportieren möchten.
2.Steuerung der Wegplanung
a.Programmname: Programmname, der beim Exportieren nach RDK verwendet werden soll.
b.Ziel: Dropdown-Menü mit XForms, die als Ziel für den RRT-Pfadplaner verwendet werden sollen.
c.Roboterkonfigurationsdatei auswählen: Wählen Sie die Roboterkonfigurationsdatei aus, die für die Bahnplanung verwendet werden soll. Das Dateiformat muss yaml sein.
d.Roboter-URDF-Datei auswählen: Wählen Sie die Roboterdefinitionsdatei aus, die für die Bahnplanung verwendet werden soll. Das Dateiformat muss urdf sein.
e.Planerkonfigurationsdatei auswählen: Wählen Sie die Planerkonfigurationsdatei aus, die für die Bahnplanung verwendet werden soll. Das Dateiformat muss yaml sein.
f.Abtastzeit: Wählen Sie die Abtastzeit aus, die bei der Erstellung der Bahn verwendet werden soll. Eine kürzere Abtastzeit führt zu mehr MoveJ-Anweisungen im Programm mit kleineren Schritten dazwischen.
g.Pfadplanung exportieren: Verwendet RRT, um eine Bahn zwischen der aktuellen Roboter-Pose und dem ausgewählten Ziel zu berechnen und ein Roboter-Programm mit einer Liste von Anweisungen zu erstellen, die die Bahn vervollständigen.