Drehscheibe (3x)
Sie können einen 3-Achsen-Positionierer erstellen, indem Sie Parameter wie den Flanschradius, seitliche und horizontale Versätze, die Höhe und die Farben für die Basis, den Träger und die Flansche angeben.
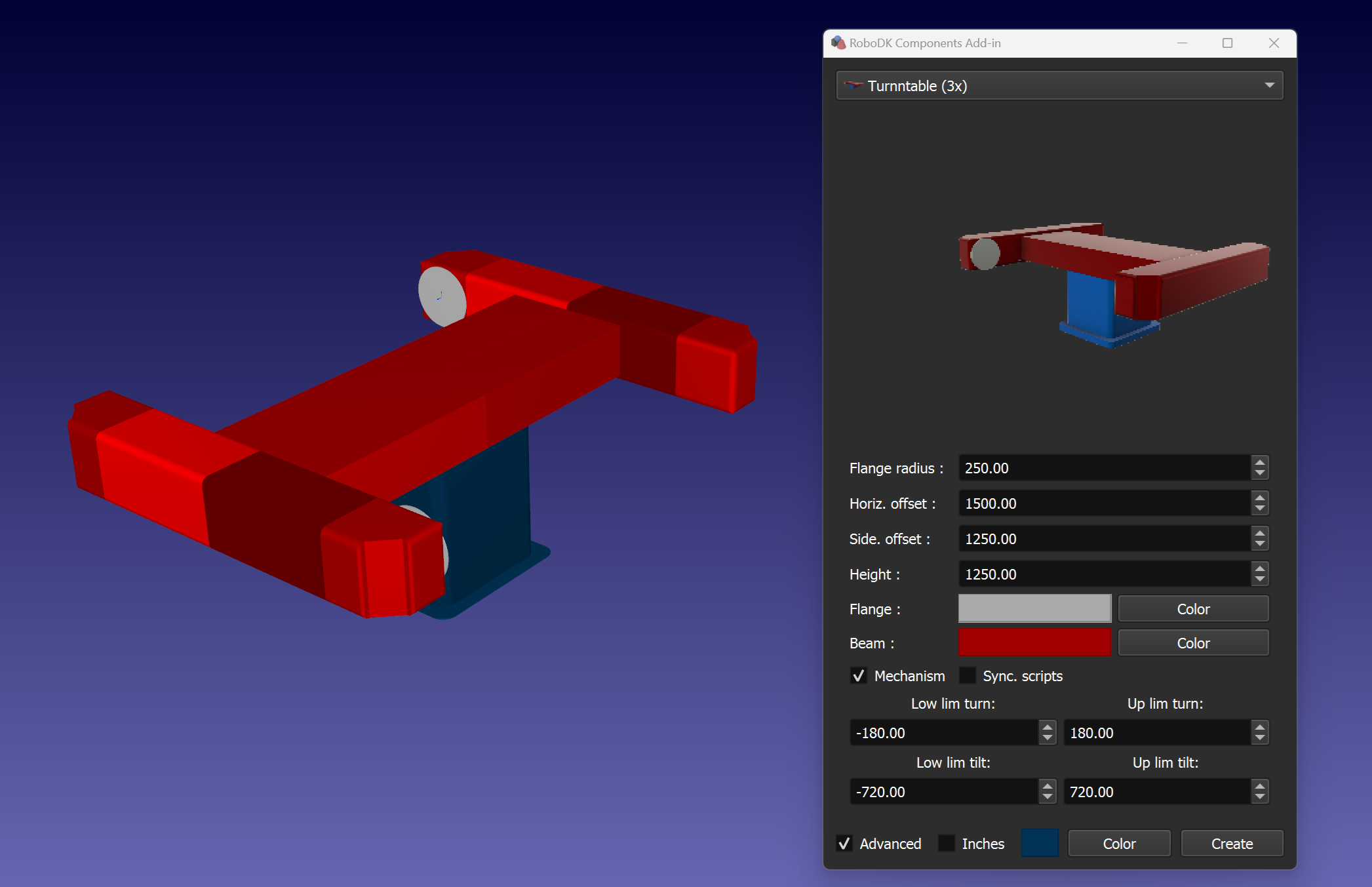
Tipp: Verwenden Sie das Kontrollkästchen Mechanismus, um einen 3-Achsen-Positioniermechanismus zu erstellen. Sie können zusätzlich die Bewegungsgrenzen mit den entsprechenden Parametern festlegen.
Tipp: Verwenden Sie das Kontrollkästchen Sync. Skripte, um zusätzliche Python-Skripte zu erstellen, die den Roboter mit der gewünschten horizontalen Achse synchronisieren, indem Sie das entsprechende Skript ausführen.
Hinweis: Standardmäßig ist C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ der Ordner, der die Beispiele für Synchronisationsskripte enthält.