H-bot
Sie können einen parametrischen H-Roboter erstellen, indem Sie Parameter für den X-Strahl, Y-Strahl, Schlitten und Z-Strahl festlegen.
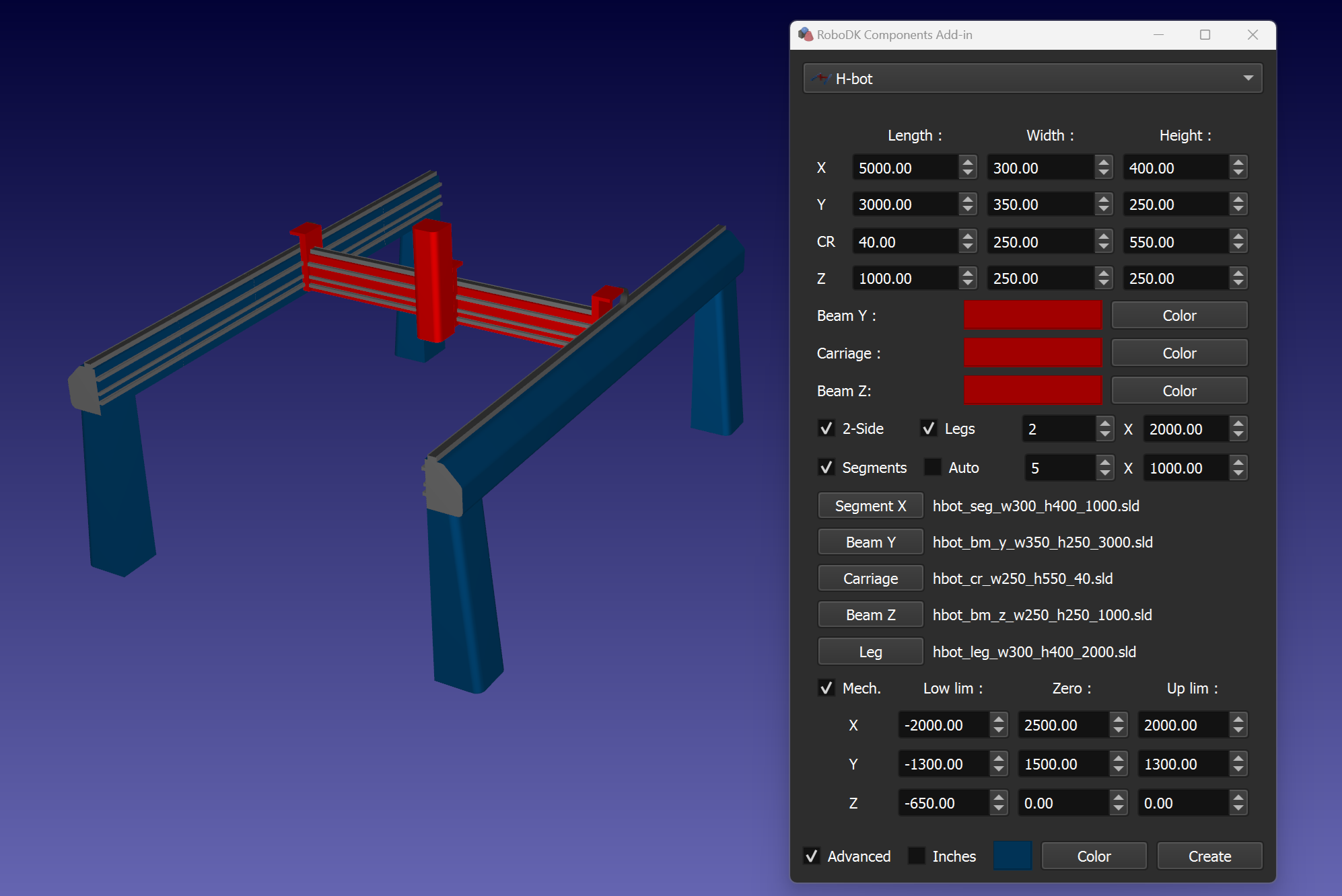
Tipp: Sie können ein H-Boot mit einem segmentierten X-Träger erstellen, indem Sie die Modelle Segment, Beam Y, Beam Z und Carriage verwenden. Es ist notwendig, die entsprechenden Modelldateien mit den Schaltflächen Segment X, Träger Y, Schlitten und Träger Z einzustellen. Achten Sie darauf, dass Sie die richtigen Werte für die Abmessungen und die richtige Anzahl von Segmenten verwenden. Verwenden Sie das Kontrollkästchen Segmente, um das entsprechende H-Boot-Modell zu erstellen.
Tipp: Verwenden Sie das Kontrollkästchen Mechanismus, um einen H-Bot-Mechanismus zu erstellen. Sie können zusätzlich die Bewegungsgrenzen und die Nullposition der Achsen mit den entsprechenden Parametern festlegen.
Hinweis: Bitte überprüfen Sie die Verschiebung der Segmente, des Trägers und des Schlittens, wenn Sie die Option Segmente verwenden. Es gibt mehrere Beispiele im Ordner Models. Der Ordner mit den Modellbeispielen ist standardmäßig C:\RoboDK\Addins\com.robodk.app.shape\Components\models\hbot\.
Tipp: Verwenden Sie das Kontrollkästchen Automatisch, um die Parameter auf der Grundlage der Messungen des Begrenzungsrahmens des Modells festzulegen. Kleine Details des Modells können das Messergebnis beeinflussen. Sie können die Option Auto nach der Messung deaktivieren und die Parameter manuell einstellen.
Tipp: Verwenden Sie das Kontrollkästchen Beine, um die erforderliche Anzahl von Basissäulen mit der angegebenen Höhe hinzuzufügen.
Tipp: Verwenden Sie das Kontrollkästchen 2-Seiten, um einen gespiegelten X-Träger hinzuzufügen.