Das Components Add-in für RoboDK fügt die notwendigen Werkzeuge hinzu, um visuelle Komponenten (3D-Objekte und Mechanismen) in RoboDK Software zu erstellen.
Mit dem RoboDK Components Add-in können Sie auch Abmessungen und Konfigurationsparameter für die von Ihnen erstellten Komponenten definieren. Eine Vorschau ist verfügbar, um zu prüfen, ob das Ergebnis korrekt ist
Sie können jede beliebige Farbe und Transparenz für die Komponenten einstellen, die Sie erstellen möchten.
In diesem Abschnitt werden die grundlegenden Funktionen des Components Add-in erläutert.
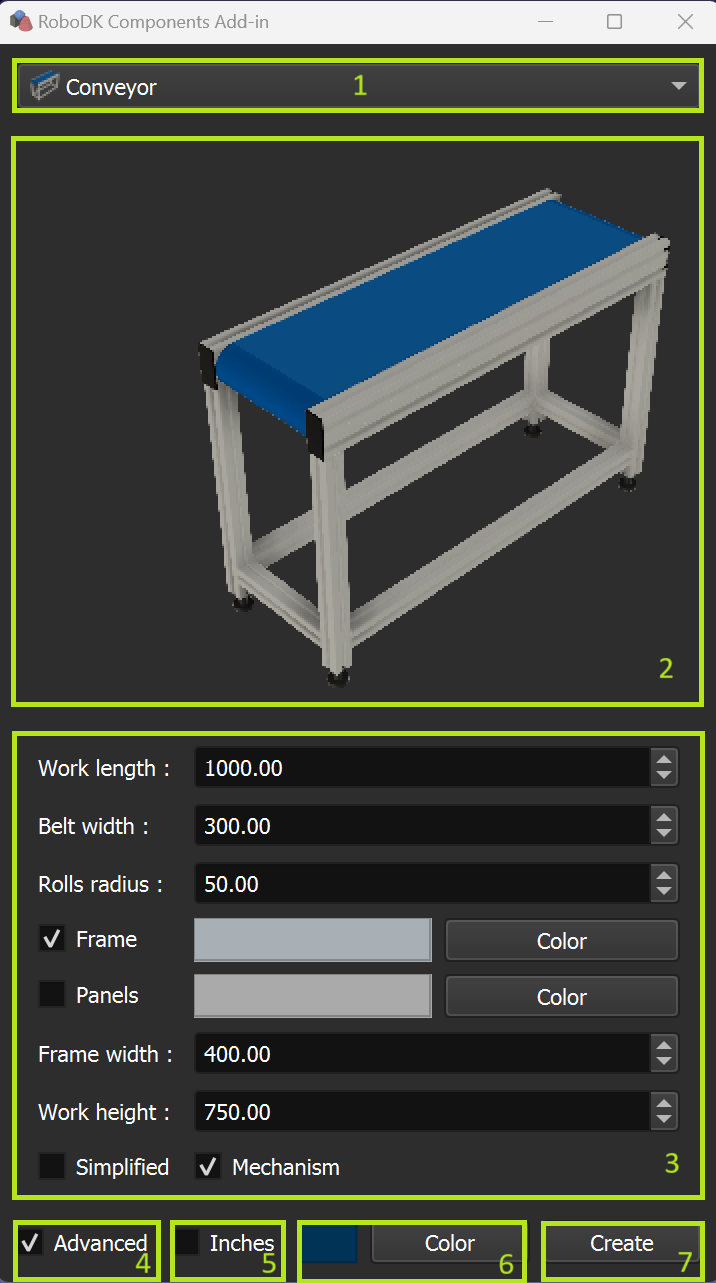
Das Fenster Komponenten Add-in enthält die folgenden Funktionselemente:
1.Listenbereich für die Auswahl der Komponenten
2.Komponente Skizze
3.Bereich Ausgewählte Komponentenparameter
4.Kontrollkästchen Sichtbarkeit der erweiterten Optionen
5.Kontrollkästchen zur Verwendung von Zoll (standardmäßig werden Millimeter verwendet)
6.Auswahl von Farbe und Transparenz
7.Erstellung von Komponenten
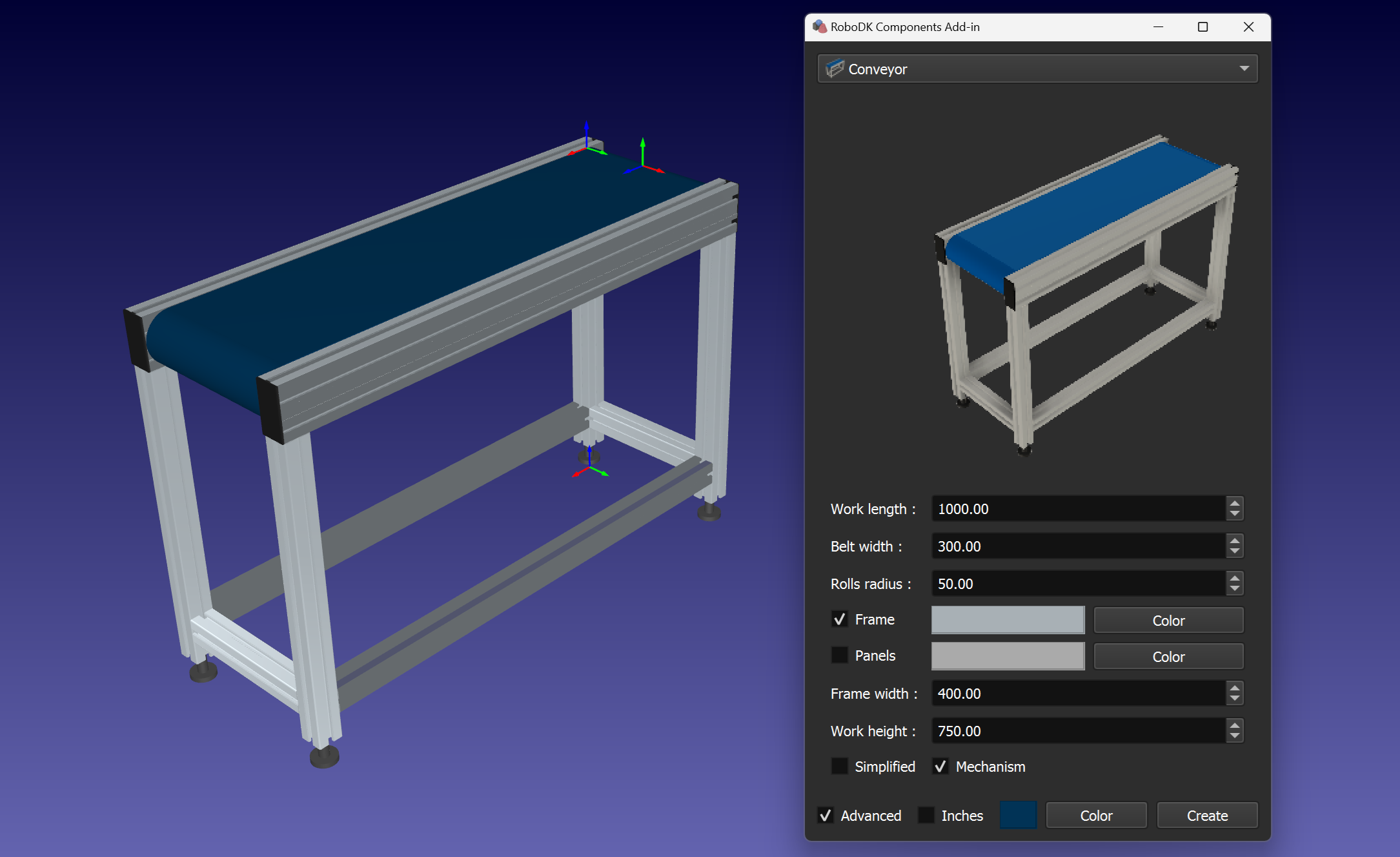
Förderer
Sie können einen Förderer erstellen, indem Sie die Abmessungen des Förderers angeben.
Tipp: Verwenden Sie das Kontrollkästchen Rahmen mit den entsprechenden Größenwerten und das Dialogfeld Farbe, um einen Förderbandrahmen hinzuzufügen.
Tipp: Verwenden Sie das Kontrollkästchen Felder und das dazugehörige Dialogfeld Farbe, um die Rahmenfelder mit der angegebenen Farbe und Transparenz hinzuzufügen.
Tipp: Verwenden Sie das Kontrollkästchen Vereinfacht, um zwischen vereinfachtem und realistischem Rahmen umzuschalten.
Tipp: Verwenden Sie das Kontrollkästchen Mechanismus, um einen Fördermechanismus zu erstellen.
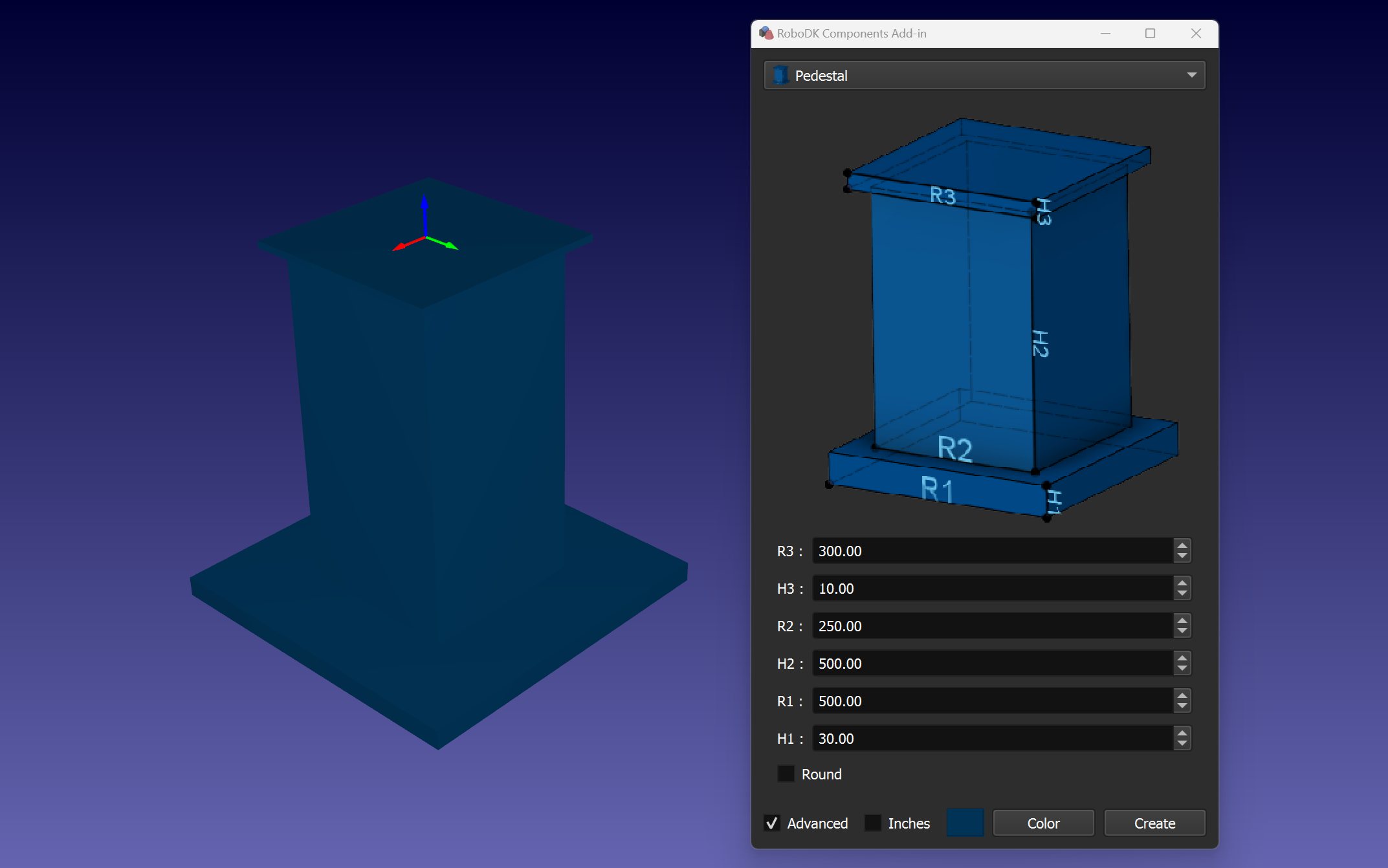
Pedestal
Sie können einen Sockel erstellen, indem Sie die Abmessungen (R1, R2, R3, H1, H2, H3) angeben.
Tipp: Verwenden Sie das Kontrollkästchen Rund, um einen zylindrischen Keller zu erstellen.
Tipp: Ein zusätzlich erstellter Rahmen namens Pedestal N Plane Frame kann nützlich sein, um die benötigten Objekte in der Mitte der oberen Ebene des Untergeschosses zu platzieren.
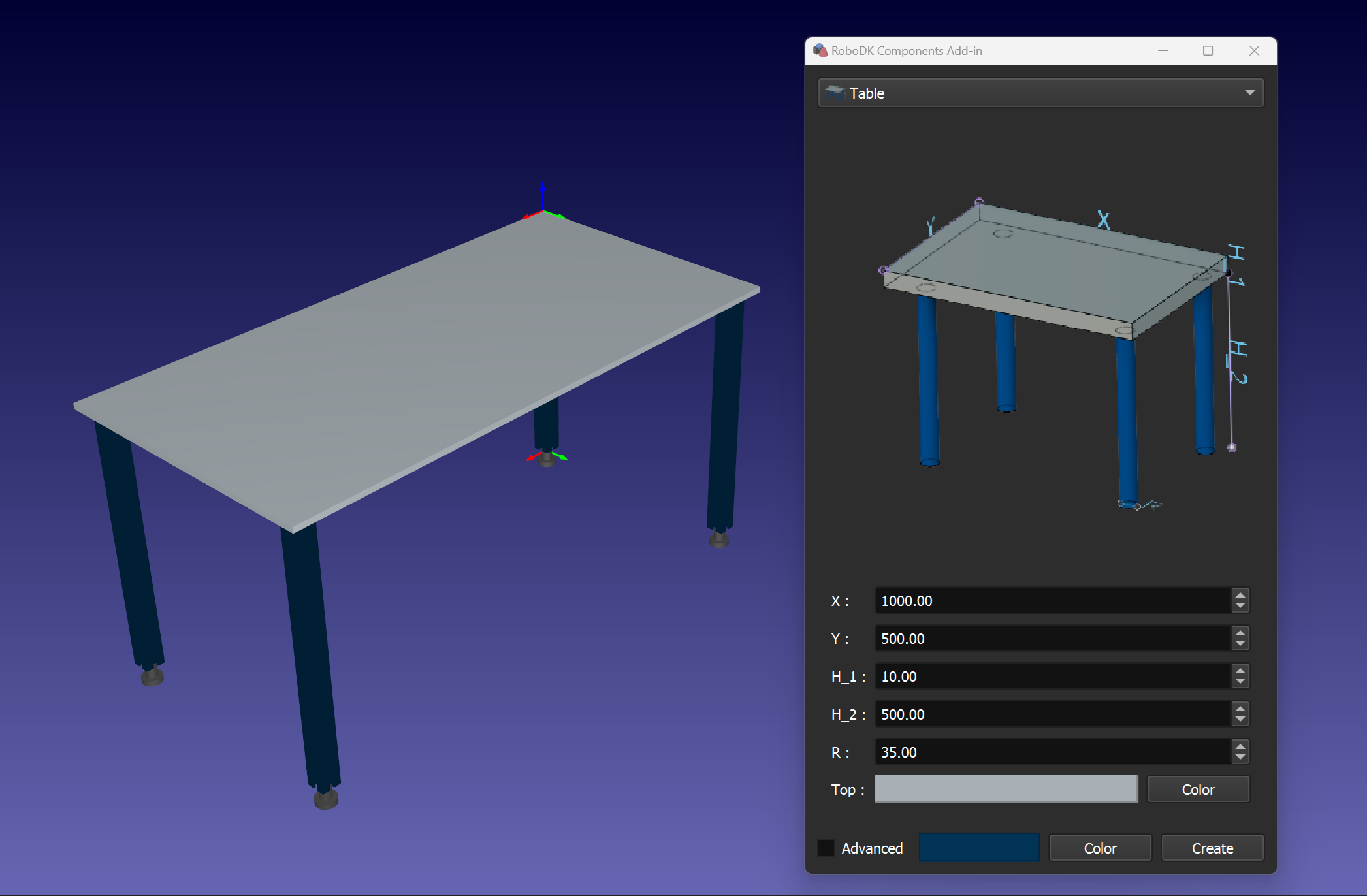
Tabelle
Sie können eine Tabelle erstellen, indem Sie die Dimensionen (X, Y, R, H1, H2) angeben.
Tipp: Verwenden Sie das Dialogfeld Farbe, um die Farbe und Transparenz der Tischoberfläche festzulegen.
Tipp: Ein zusätzlich erstellter Rahmen namens Table N Plane Frame kann nützlich sein, um die benötigten Objekte auf der Tischoberfläche zu platzieren.
Tipp: Verwenden Sie das Kontrollkästchen Vereinfacht, um zwischen vereinfachten und realistischen Tischbeinen umzuschalten.
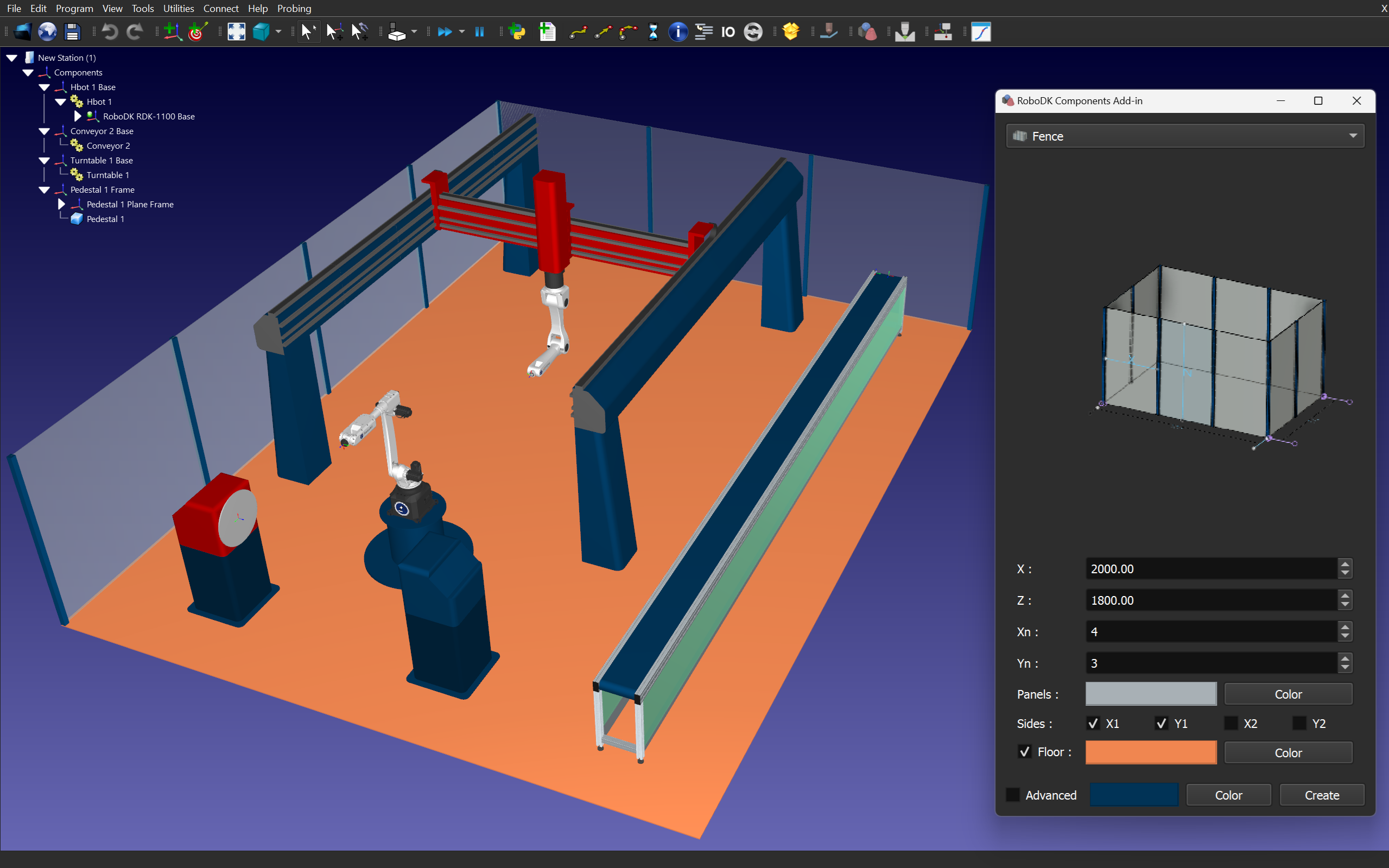
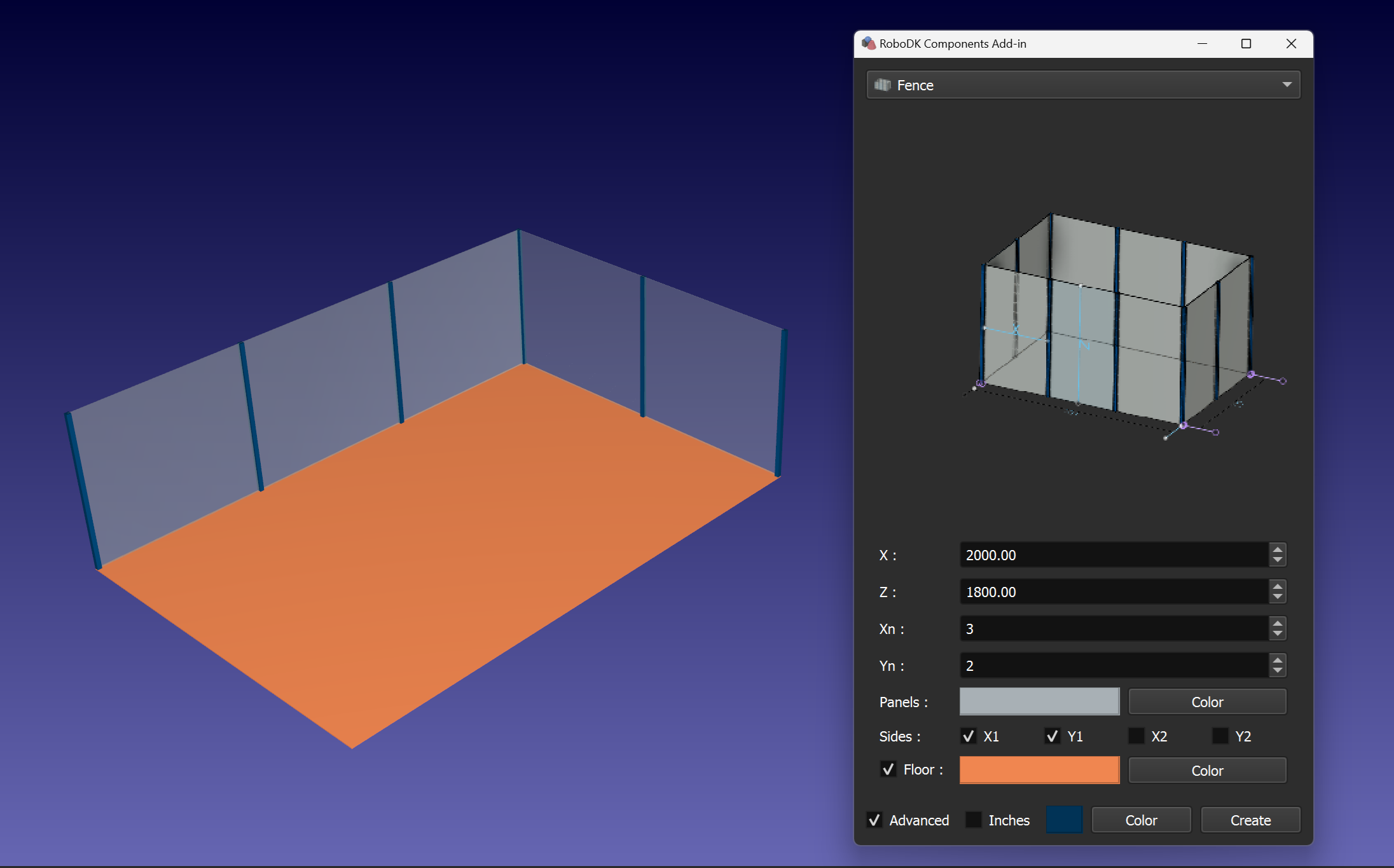
Zaun
Sie können einen Zaun erstellen, indem Sie die Abmessungen der Felder (X, Z) und die Anzahl der Abschnitte (Xn, Yn) angeben.
Tipp: Verwenden Sie das Dialogfeld Farbe, um die Farbe und Transparenz der Zaunfelder festzulegen.
Tipp: Verwenden Sie das Kontrollkästchen Boden und das zugehörige Dialogfeld Farbe, um den Boden mit der angegebenen Farbe und Transparenz hinzuzufügen.
Tipp: Sie können die Zaunkonfiguration ändern, indem Sie die Kontrollkästchen X1, X2, Y1 und Y2 betätigen.
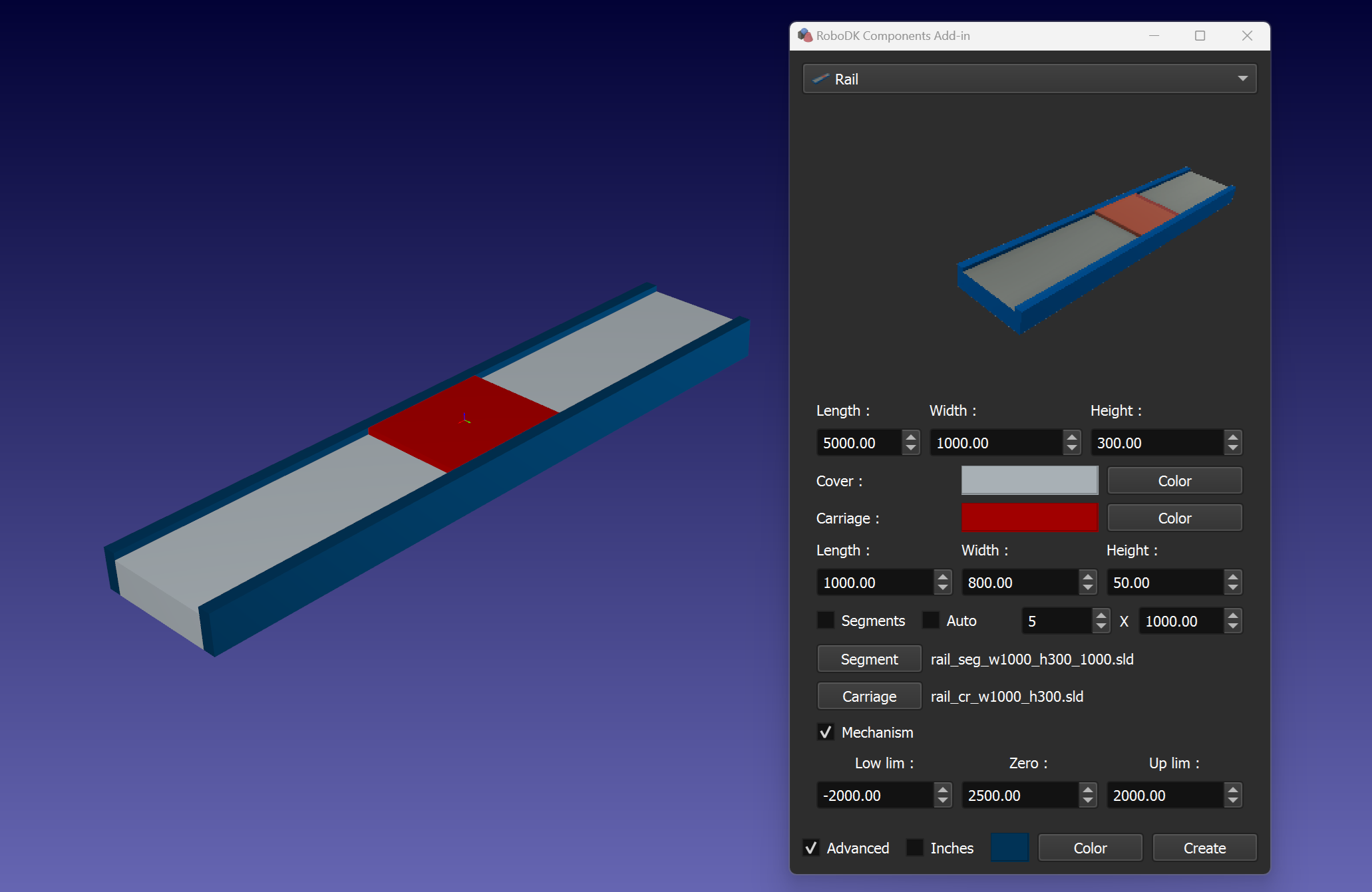
Schiene
Sie können eine Schiene erstellen, indem Sie Parameter wie Länge, Breite, Höhe und Farbe für die Schienenbasis und den Wagen angeben.
Tipp: Sie können segmentierte Schienen erstellen, indem Sie Modelle der Basissegmente und des Wagens verwenden. Dazu müssen Sie die entsprechenden Modelldateien über die Schaltflächen Segmente und Schlitten einstellen. Achten Sie darauf, dass Sie die richtigen Maßwerte und die richtige Anzahl von Segmenten verwenden. Verwenden Sie das Kontrollkästchen Segmente, um das entsprechende Schienenmodell zu erstellen.
Tipp: Verwenden Sie das Kontrollkästchen Mechanismus, um einen Schienenmechanismus zu erstellen. Sie können zusätzlich die Bewegungsgrenzen und die Nullposition des Schlittens mit den entsprechenden Parametern festlegen.
Hinweis: Bitte überprüfen Sie die Verschiebung der Segmente und Wagenmodelle, wenn Sie die Option Segmente verwenden. Es gibt mehrere Beispiele im Ordner Models. Der Ordner mit den Modellbeispielen ist standardmäßig C:\RoboDK\Addins\com.robodk.app.shape\Components\models\rail\.
Tipp: Verwenden Sie das Kontrollkästchen Automatisch, um die Parameter auf der Grundlage der Messungen des Begrenzungsrahmens des Modells festzulegen. Kleine Details des Modells können das Messergebnis beeinflussen. Sie können die Option Auto nach der Messung deaktivieren und die Parameter manuell einstellen.
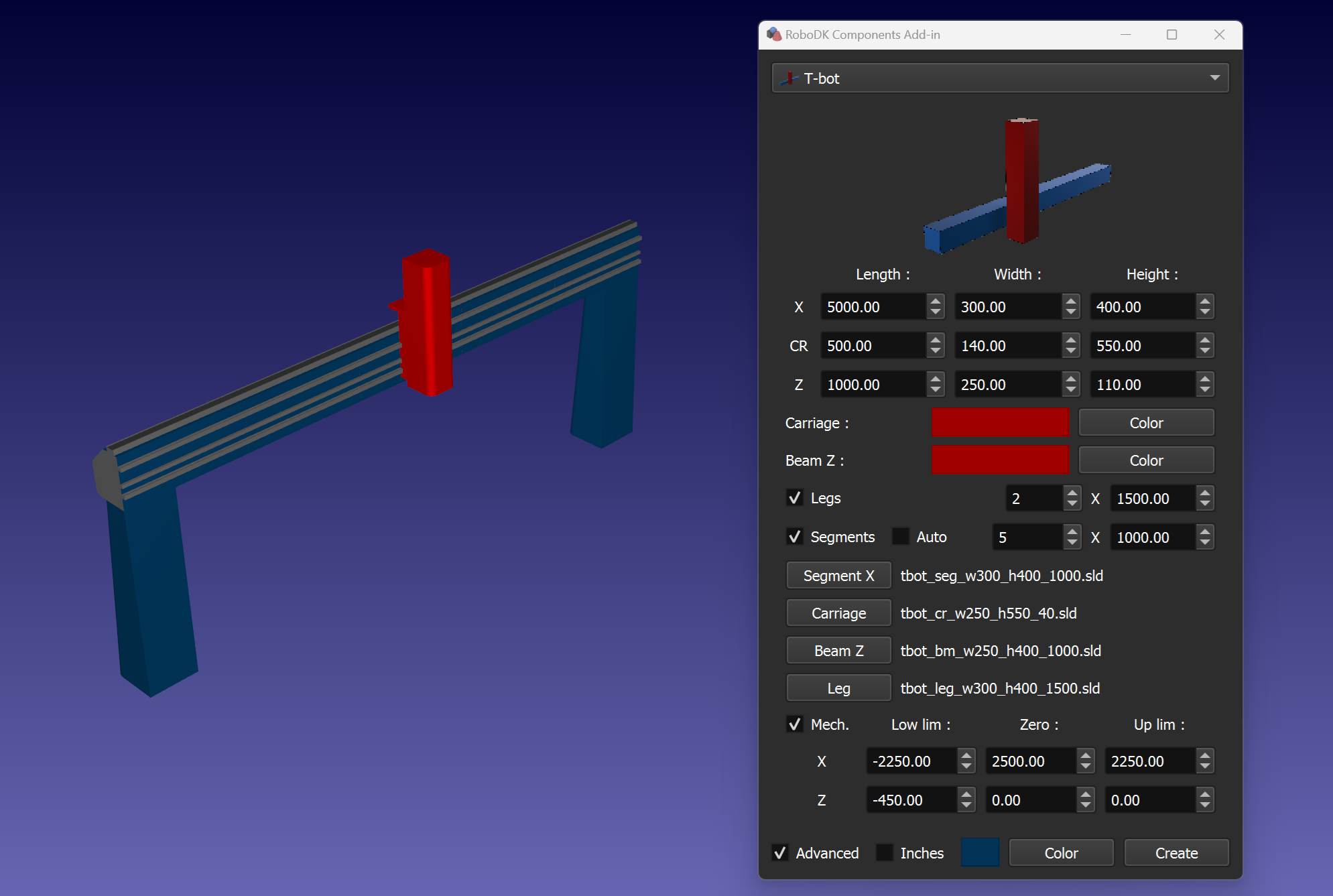
T-bot
Sie können einen parametrischen T-Bot erstellen, indem Sie Parameter für den X-Strahl, den Schlitten und den Z-Strahl festlegen.
Tipp: Sie können einen T-Bot mit einem segmentierten X-Träger erstellen, indem Sie die Modelle Segment, Beam Z und Carriage verwenden. Sie müssen die entsprechenden Modelldateien über die Schaltflächen Segment X, Carriage und Beam Z einstellen. Achten Sie darauf, dass Sie die richtigen Werte für die Abmessungen und die richtige Anzahl von Segmenten verwenden. Verwenden Sie das Kontrollkästchen Segmente, um das entsprechende T-Bot-Modell zu erstellen.
Tipp: Verwenden Sie das Kontrollkästchen Mechanismus, um einen T-Bot-Mechanismus zu erstellen. Sie können zusätzlich die Bewegungsgrenzen und die Nullposition der Achsen mit den entsprechenden Parametern festlegen.
Hinweis: Bitte überprüfen Sie die Verschiebung der Segmente, des Trägers und des Schlittens, wenn Sie die Option Segmente verwenden. Es gibt mehrere Beispiele im Ordner Models. Der Ordner mit den Modellbeispielen ist standardmäßig C:\RoboDK\Addins\com.robodk.app.shape\Components\models\tbot\.
Tipp: Verwenden Sie das Kontrollkästchen Automatisch, um die Parameter auf der Grundlage der Messungen des Begrenzungsrahmens des Modells festzulegen. Kleine Details des Modells können das Messergebnis beeinflussen. Sie können die Option Auto nach der Messung deaktivieren und die Parameter manuell einstellen.
Tipp: Verwenden Sie das Kontrollkästchen Beine, um die erforderliche Anzahl von Basissäulen mit der angegebenen Höhe hinzuzufügen.
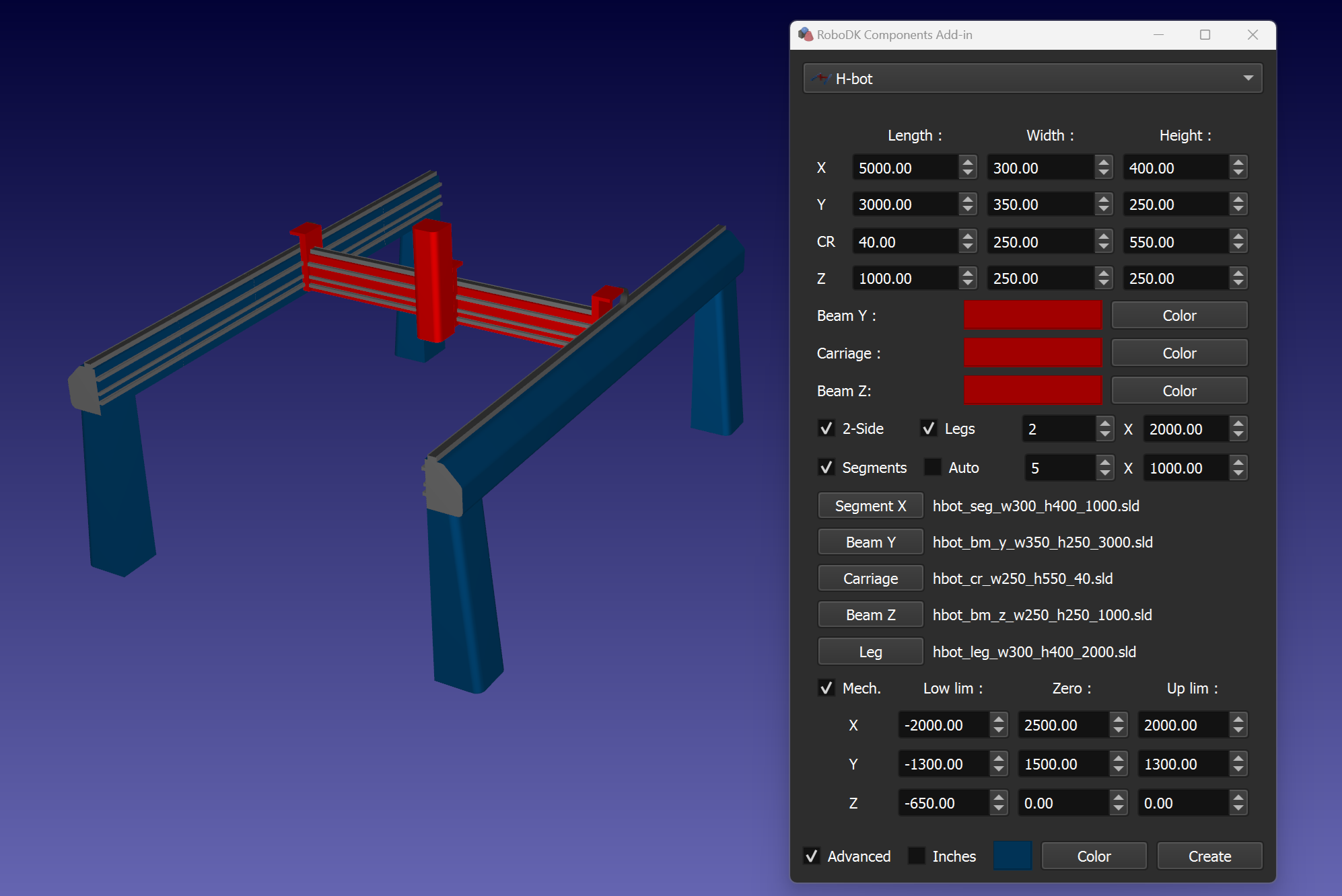
H-bot
Sie können einen parametrischen H-Roboter erstellen, indem Sie Parameter für den X-Strahl, Y-Strahl, Schlitten und Z-Strahl festlegen.
Tipp: Sie können ein H-Boot mit einem segmentierten X-Träger erstellen, indem Sie die Modelle Segment, Beam Y, Beam Z und Carriage verwenden. Es ist notwendig, die entsprechenden Modelldateien mit den Schaltflächen Segment X, Träger Y, Schlitten und Träger Z einzustellen. Achten Sie darauf, dass Sie die richtigen Werte für die Abmessungen und die richtige Anzahl von Segmenten verwenden. Verwenden Sie das Kontrollkästchen Segmente, um das entsprechende H-Boot-Modell zu erstellen.
Tipp: Verwenden Sie das Kontrollkästchen Mechanismus, um einen H-Bot-Mechanismus zu erstellen. Sie können zusätzlich die Bewegungsgrenzen und die Nullposition der Achsen mit den entsprechenden Parametern festlegen.
Hinweis: Bitte überprüfen Sie die Verschiebung der Segmente, des Trägers und des Schlittens, wenn Sie die Option Segmente verwenden. Es gibt mehrere Beispiele im Ordner Models. Der Ordner mit den Modellbeispielen ist standardmäßig C:\RoboDK\Addins\com.robodk.app.shape\Components\models\hbot\.
Tipp: Verwenden Sie das Kontrollkästchen Automatisch, um die Parameter auf der Grundlage der Messungen des Begrenzungsrahmens des Modells festzulegen. Kleine Details des Modells können das Messergebnis beeinflussen. Sie können die Option Auto nach der Messung deaktivieren und die Parameter manuell einstellen.
Tipp: Verwenden Sie das Kontrollkästchen Beine, um die erforderliche Anzahl von Basissäulen mit der angegebenen Höhe hinzuzufügen.
Tipp: Verwenden Sie das Kontrollkästchen 2-Seiten, um einen gespiegelten X-Träger hinzuzufügen.
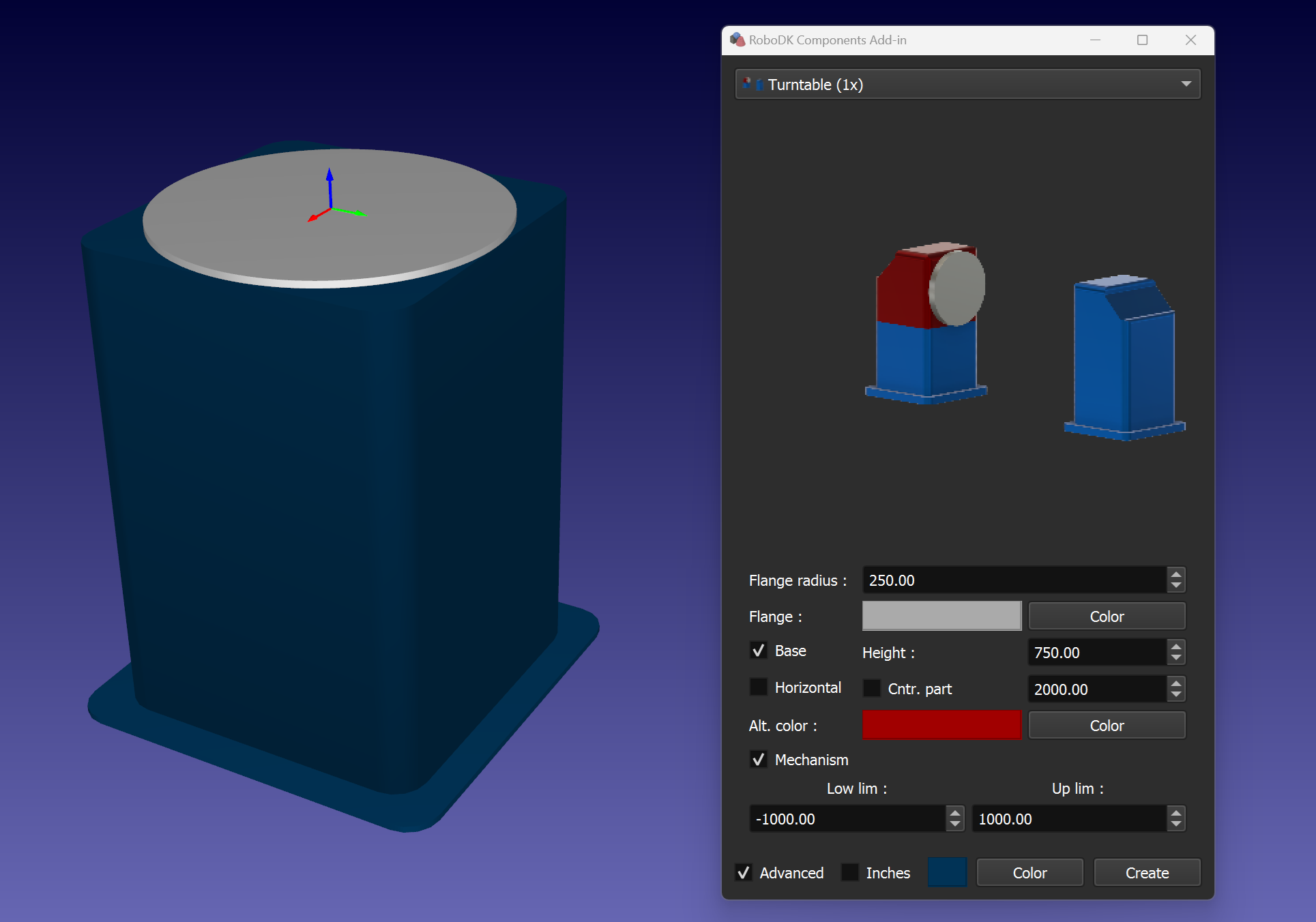
Drehteller (1x)
Sie können eine Drehscheibe erstellen, indem Sie Parameter wie den Flanschradius, die Höhe der Basis und die Farben für die Basis und den Flansch angeben.
Tipp: Verwenden Sie das Kontrollkästchen Basis und den Parameter Höhe, um den Körper des Positionierers zu erstellen.
Tipp: Sie können einen horizontalen oder vertikalen Positionierer erstellen, indem Sie das Kontrollkästchen Horizontal aktivieren. Zusätzlich können Sie das Kontrollkästchen Gegenstück und den entsprechenden Offset-Parameter verwenden, wenn ein Gegenstück erforderlich ist.
Tipp: Verwenden Sie das Kontrollkästchen Mechanismus, um einen Drehtischmechanismus zu erstellen. Sie können zusätzlich die Bewegungsgrenzen mit den entsprechenden Parametern festlegen.
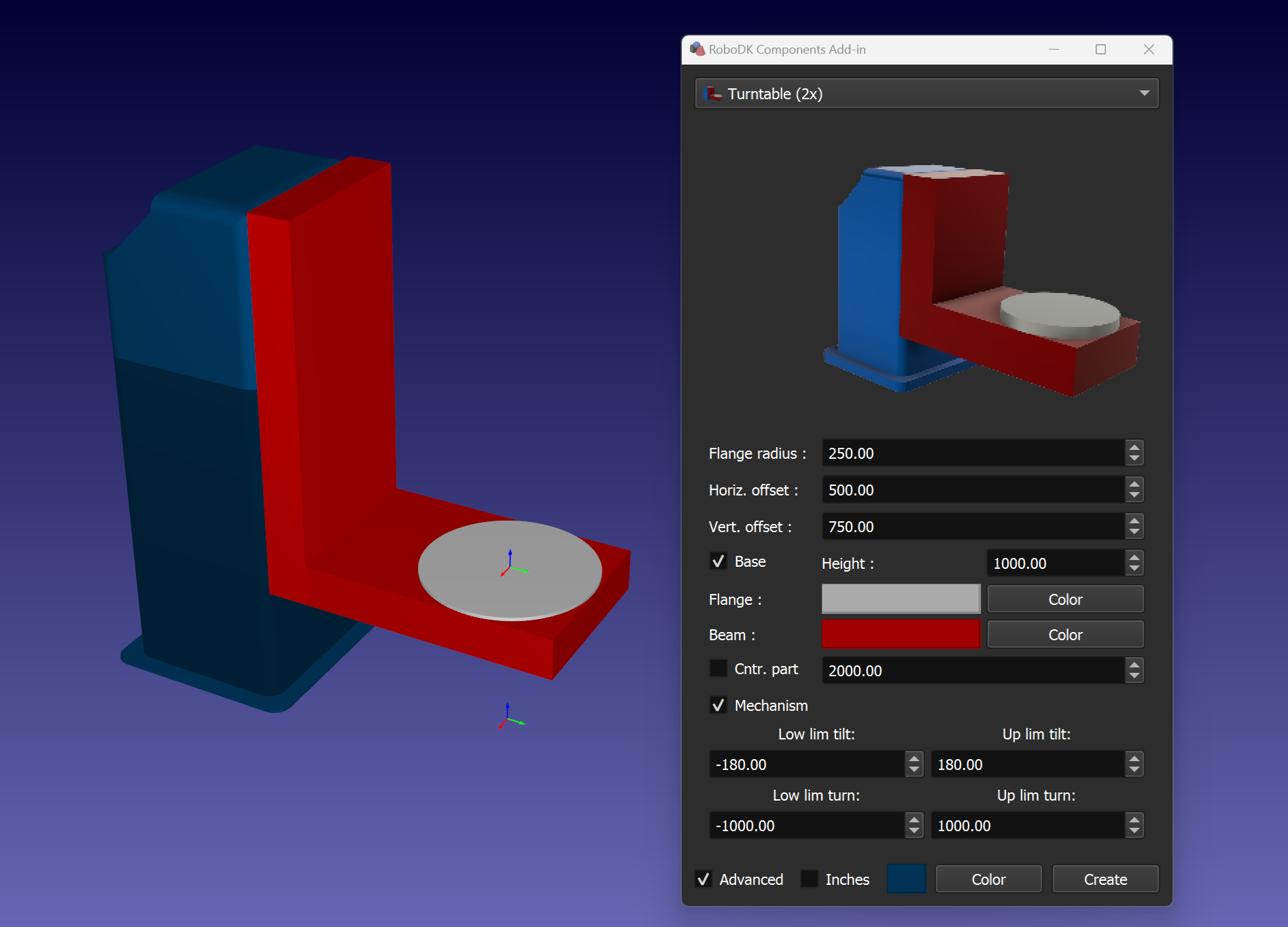
Drehscheibe (2x)
Sie können einen kippbaren Drehtisch erstellen, indem Sie Parameter wie den Flanschradius, den vertikalen und horizontalen Versatz, die Basishöhe und die Farben für die Basis, den Träger und den Flansch angeben.
Tipp: Verwenden Sie das Kontrollkästchen Basis und den Parameter Höhe, um die Basis des Positionierers zu erstellen.
Tipp: Sie können das Kontrollkästchen Zählerteil und den entsprechenden Offset-Parameter verwenden, wenn ein Zählerteil erforderlich ist.
Tipp: Verwenden Sie das Kontrollkästchen Mechanismus, um einen Kipp-Drehtisch-Mechanismus zu erstellen. Sie können zusätzlich die Bewegungsgrenzen mit den entsprechenden Parametern festlegen.
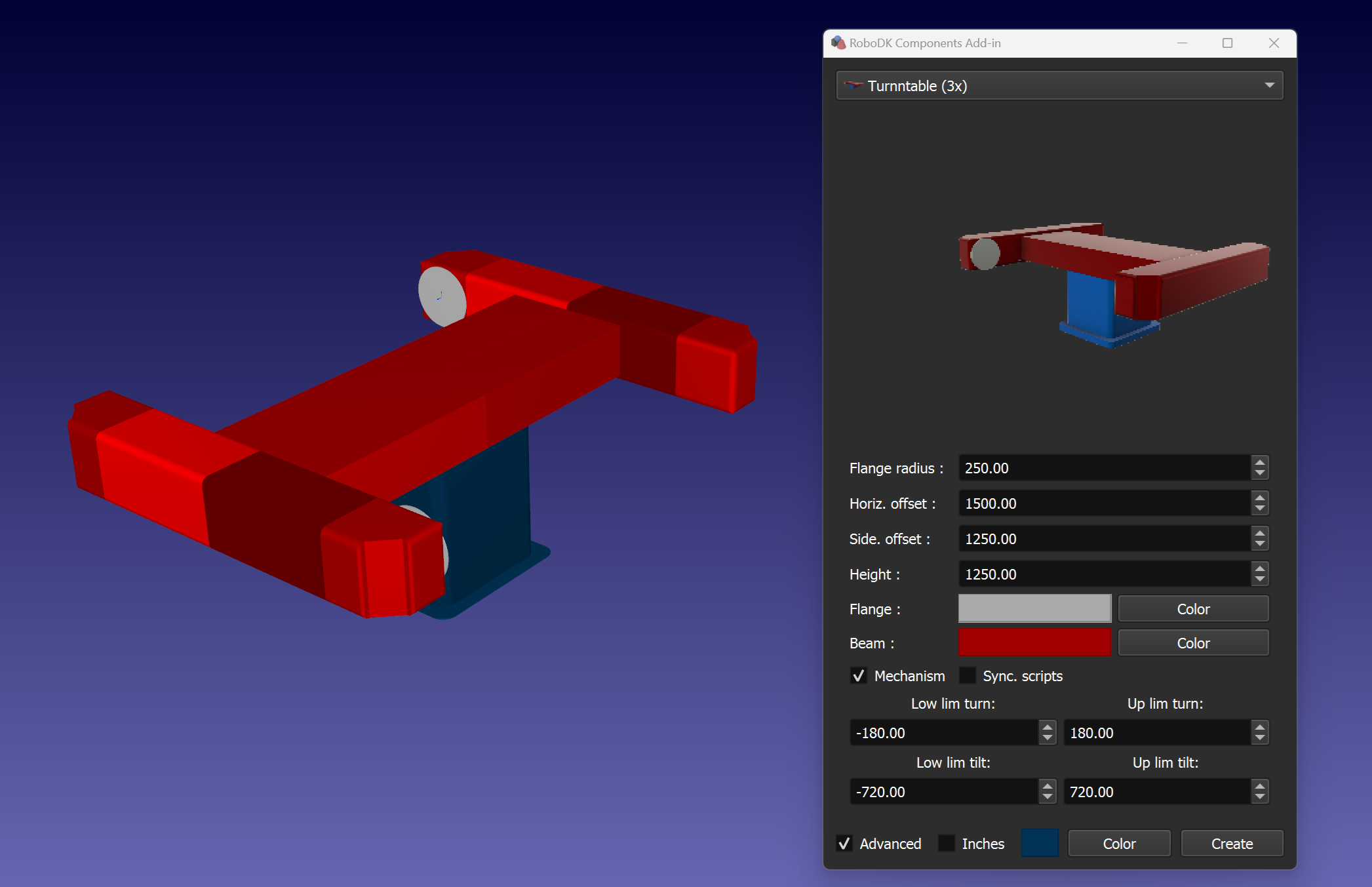
Drehscheibe (3x)
Sie können einen 3-Achsen-Positionierer erstellen, indem Sie Parameter wie den Flanschradius, seitliche und horizontale Versätze, die Höhe und die Farben für die Basis, den Träger und die Flansche angeben.
Tipp: Verwenden Sie das Kontrollkästchen Mechanismus, um einen 3-Achsen-Positioniermechanismus zu erstellen. Sie können zusätzlich die Bewegungsgrenzen mit den entsprechenden Parametern festlegen.
Tipp: Verwenden Sie das Kontrollkästchen Sync. Skripte, um zusätzliche Python-Skripte zu erstellen, die den Roboter mit der gewünschten horizontalen Achse synchronisieren, indem Sie das entsprechende Skript ausführen.
Hinweis: Standardmäßig ist C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ der Ordner, der die Beispiele für Synchronisationsskripte enthält.
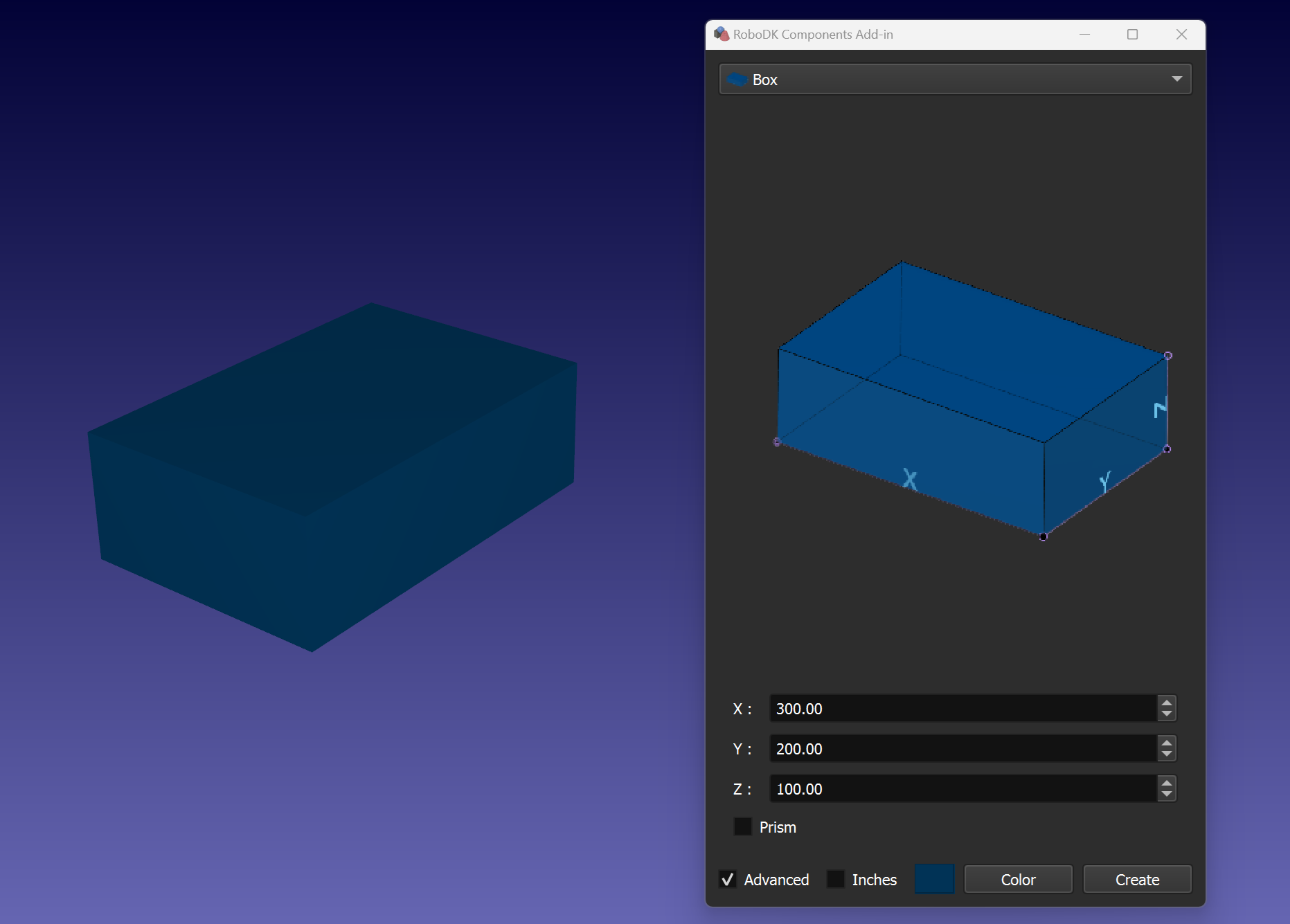
Box
Sie können einen Rahmen erstellen, indem Sie die Abmessungen (X, Y, Z) angeben.
Tipp: Verwenden Sie das Kontrollkästchen Prisma, um ein Prisma zu erstellen.
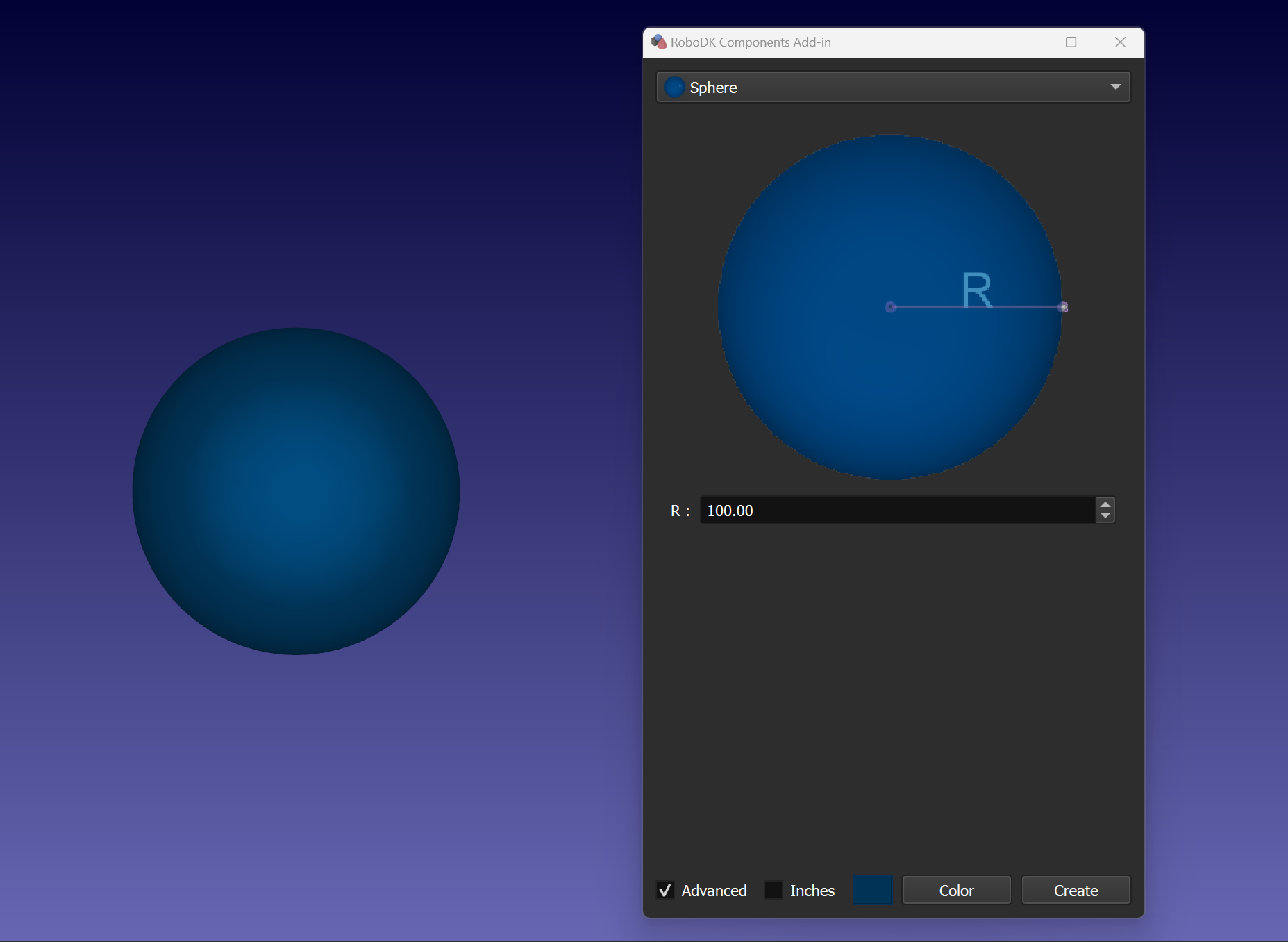
Sphäre
Sie können eine Kugel erstellen, indem Sie den Radius (R) angeben.
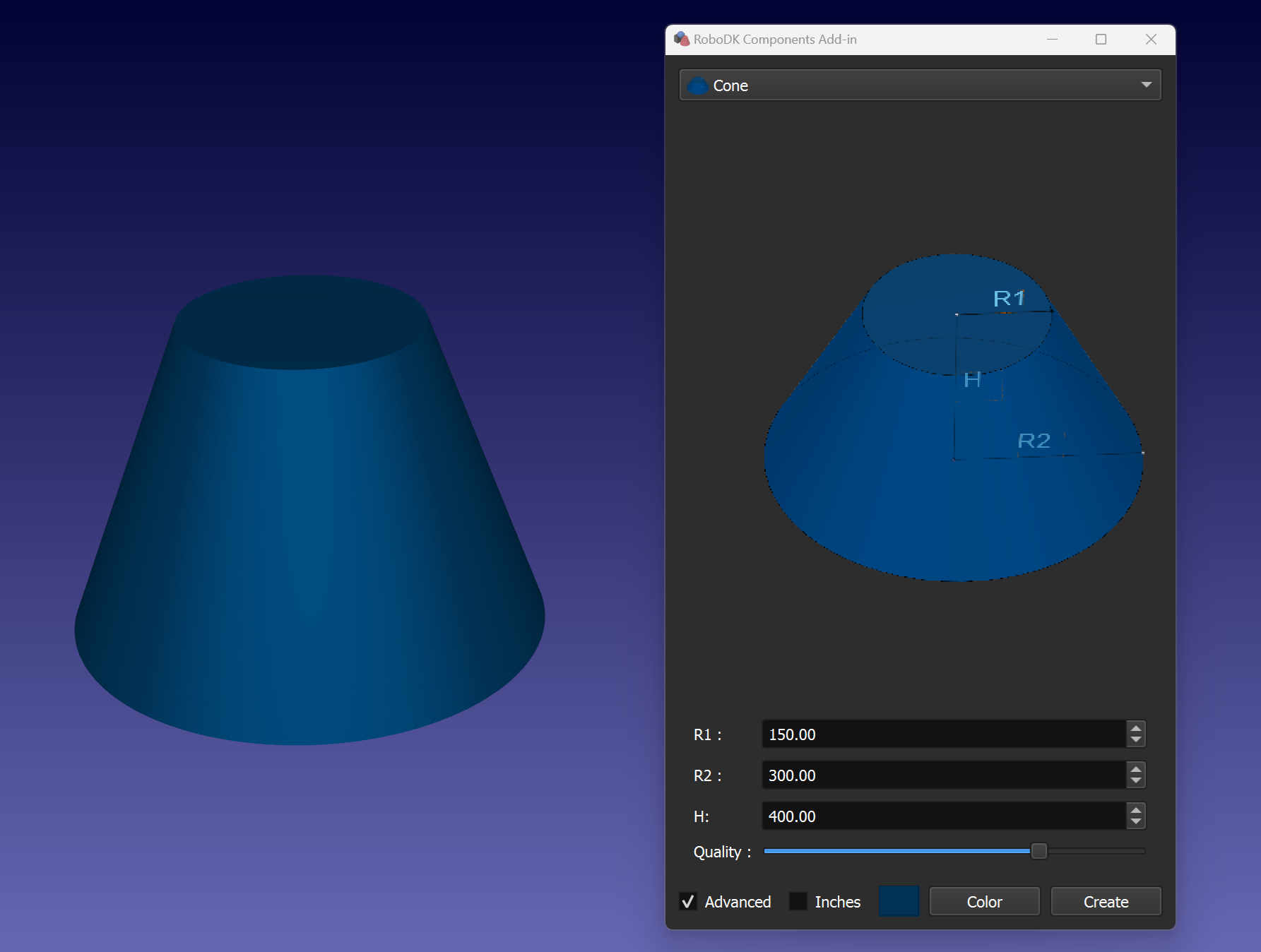
Kegel
Sie können einen Kegel erstellen, indem Sie die Abmessungen (R1, R2, H) und Qualitätsparameter angeben.
Tipp: Wenn R1 gleich R2 ist, wird ein Zylinder erstellt.