Einrichten der simulierten Kamera
Um die Assets der Station genau über den Video-Feed zu legen, muss eine simulierte Kamera erstellt werden. Diese simulierte Kamera verwendet die Kameraposition und die Flugbahn, die mit Hilfe der Referenzmarken berechnet wurden, um die RoboDK-Station aus dem gleichen Winkel, der gleichen Entfernung und der gleichen Flugbahn wie das Eingangsvideo aufzunehmen.
Diese simulierte Kameraauflösung muss mit dem Eingangsvideo übereinstimmen, damit die Skalierung der Marker korrekt ist. Die Schritte zum Hinzufügen einer virtuellen Kamera zur Station werden im Folgenden beschrieben:
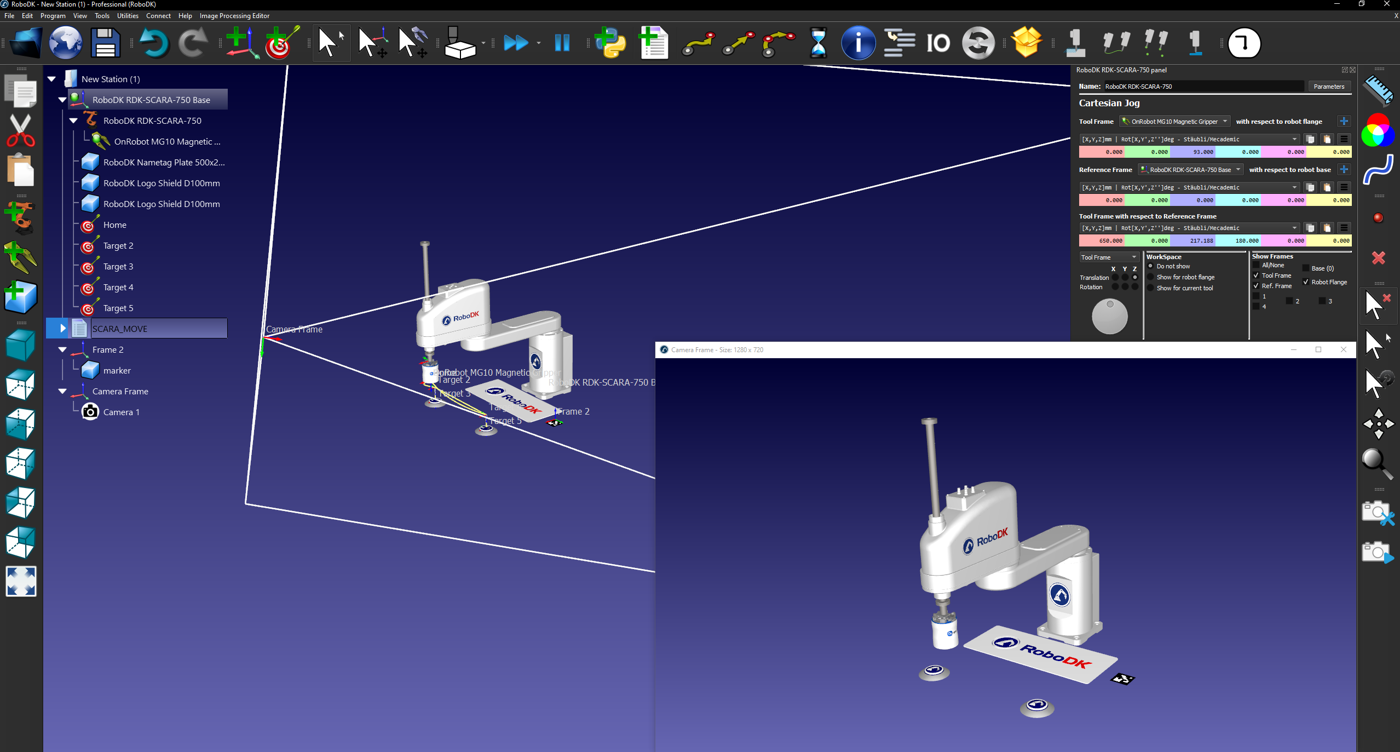
1.Fügen Sie eine Kamera zu Ihrer Station hinzu, indem Sie in der Symbolleiste Bildbearbeitungseditor à RoboDK Kamera hinzufügen wählen.
2.Klicken Sie mit der rechten Maustaste auf die Kamera oder den Kamera-Feed und wählen Sie "Kameraeinstellungen".
3.Passen Sie die Einstellungen der virtuellen Kamera an die Auflösung des Eingangsvideos an.
4.Richten Sie den Referenzrahmen so aus, dass die simulierte Kamera den virtuellen Aruco-Marker sehen kann.
Um die besten Ergebnisse zu erzielen, sollten Sie bei der Aufnahme des physischen Eingangsvideos die folgenden Punkte beachten:
1.Stellen Sie den Marker auf eine ebene Fläche in einer gut beleuchteten Umgebung. Um optimale Ergebnisse zu erzielen, berücksichtigen Sie die Größe und den Abstand der Objekte in der virtuellen Station in Bezug auf den Marker und die Aufnahmeumgebung.
2.Konsistente Kameraeinstellungen (echte und simulierte Kameras müssen die gleichen Auflösungseinstellungen haben).
3.Lesbare Aruco-IDs (Die Kamera muss die IDs lesbar halten. Was Sie vermeiden sollten: Schnelles/verwackeltes Filmmaterial, niedrige Kameraauflösung, großer Abstand der Marker zur Kamera).
4.Stellen Sie sicher, dass das Video im Format .mp4 oder .avi vorliegt.