Importieren Sie die Markierung
Sie sollten die Markierung in RoboDK importieren, um anzugeben, wo sich die Markierung in Bezug auf den Roboter und andere Objekte befindet.
Befolgen Sie diese Schritte, um den Marker richtig zu platzieren:
1.Erstellen Sie in Ihrer RoboDK Station einen neuen Referenzrahmen.
2.Klicken Sie mit der rechten Maustaste auf den neuen Referenzrahmen und wählen Sie "Element hinzufügen...".
3.Suchen und wählen Sie die mit dem Fiducial Marker Generator erstellte PNG-Markierung.
4.Passen Sie den Maßstab der virtuellen Markierung an die Größe der realen Markierung an:
Beispiel: Der Charuco Diamond Marker ist standardmäßig 106,186 mm x 106,186 mm groß. Wenn die Größe der gedruckten Markierung 280 mm x 280 mm beträgt, muss ein Skalierungsfaktor von 2,63688 → ( 280 / 106,186 ) angewendet werden. Dies können Sie tun, indem Sie auf das Markierungsobjekt doppelklicken und Mehr Optionen à Maßstab anwenden wählen.
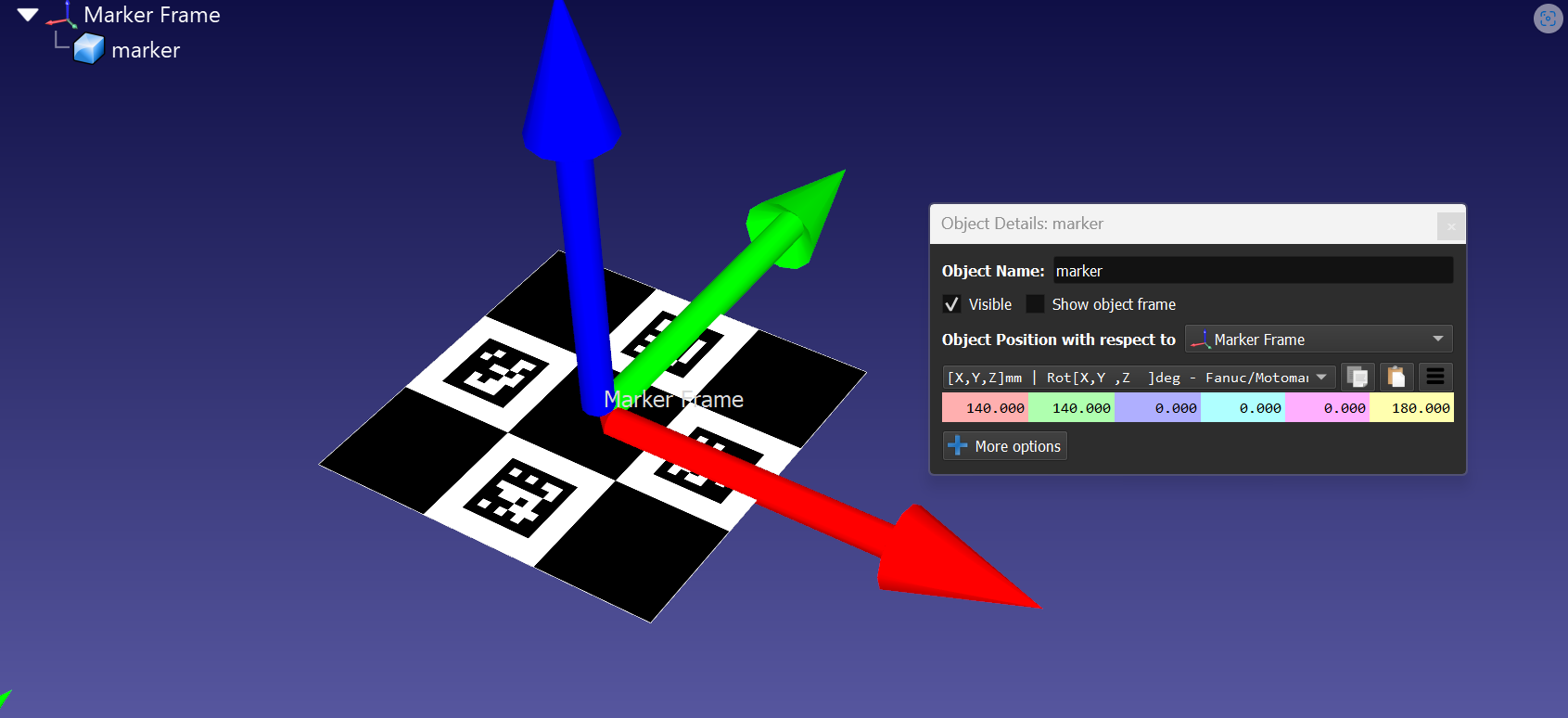
5.Richten Sie die Mitte der Markierung am Ursprung des Referenzrahmens aus, wobei die Y-Achse auf die obere ID zeigt.
Beispiel: Um die Markierung zu verschieben, doppelklicken Sie auf das Markierungsobjekt und ändern Sie die Position des Objekts in Bezug auf den Markierungsrahmen. In unserem Beispiel musste die Markierung um 140 mm in X-Richtung verschoben, um 140 mm in Y-Richtung verschoben und um 180° um die Z-Achse gedreht werden. In der Abbildung unten sehen Sie ein Beispiel für die richtige Position.
6.Platzieren Sie den Markierungsrahmen in der Station, um die Stationsobjekte relativ zur Markierung auszurichten.