Bezugssysteme
Ein Bezugssystem definiert die Position eines Elements in Bezug auf ein anderes Element mit einer bestimmten Position und Ausrichtung. Ein Element kann ein Gegenstand/Objekt, ein Roboter oder ein anderes Bezugssystem sein. Alle Offline-Programmieranwendungen erfordern das Definieren eines Bezugssystems, um die Position von Objekten in Bezug zu einen Roboter zu lokalisieren und die Simulation somit entsprechend zu aktualisieren.
Ziehen Sie jedes Bezugssystem oder jedes Objekt innerhalb der Stationsstruktur per Drag & Drop, um eine bestimmte Beziehung zu definieren, z. B. das Verschachteln von Bezugssystemen, was in der folgenden Abbildung dargestellt ist.
Es ist üblich, die Position von einem oder mehreren Bezugssystemen in Relation auf den Roboter durch Berühren von 3 Punkten zu definieren. Dies ermöglicht das Platzieren von Objekten im virtuellen Raum. Die Prozedur kann mit dem Roboter-Teach-Pendant oder RoboDK ausgeführt werden (weiterführende Informationen finden Sie im Abschnitt Bezugssystem kalibrieren).
Mit RoboDK ist es möglich, die Translations- und Rotationswerte manuell einzugeben, einschließlich verschiedener Reihenfolgen der Rotationen der Euler-Winkel.
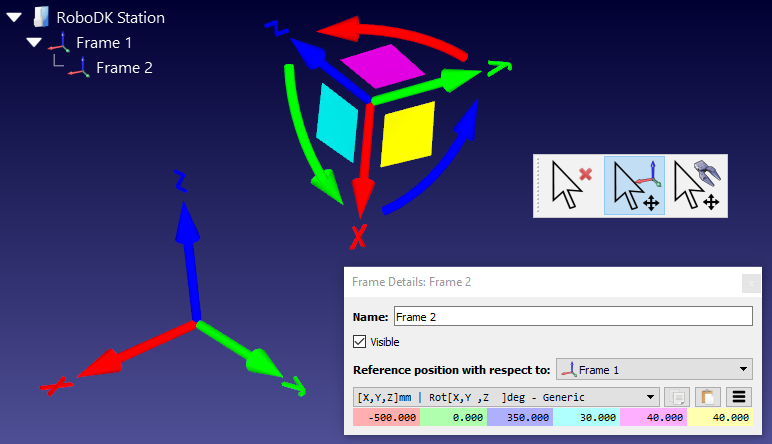
Standardmäßig zeigt RoboDK eine solche Beziehung als XYZ-Position und die zugehörigen Euler-Winkel im X➔Y➔Z-Format an. Dies bedeutet, dass die Rotation in der folgenden Reihenfolge erfolgt:
1.Eine Rotation um die X Achse wird vollzogen (hellblau).
2.Eine Rotation um die statische Y Achse wird vollzogen (pink).
3.Eine Rotation um die statische Z Achse wird vollzogen (gelb).
Fanuc- und Motoman-Controller verwenden das zuvor beschriebene Schema, andere Roboterhersteller behandeln die Rotationsreihenfolge jedoch auf andere Weise.
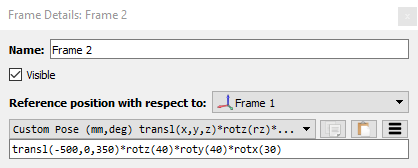
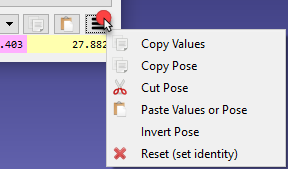
Es ist möglich, unter verschiedenen Schemata aus der Dropdown-Liste des Fensters Bezugssystem Details auszuwählen (Doppelklick auf ein Bezugssystem).
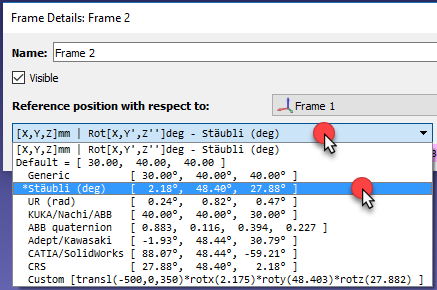
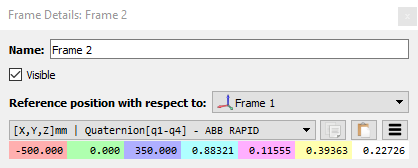
Zum Beispiel verwenden Stäubli-Roboter die Reihenfolge X➔Y'➔Z '', KUKA- und Nachi-Roboter hingegen verwenden Z➔Y'➔X ''. ABB-Steuerungen andererseits verwenden Quaternion, die zur Definition der Rotation 4 Werte benötigen:
Es ist des Weiteren möglich, ein benutzerdefiniertes Format manuell einzugeben. Beispielsweise wird der folgende Befehl angezeigt, wenn die Option benutzerdefiniert ausgewählt ist