Fräser-Werkzeugbibliothek
Die Fräswerkzeugbibliothek ist eine Sammlung von Maschinenfräswerkzeugen oder Schaftfräsern. Diese Werkzeuge oder Fräser werden am Hauptwerkzeug des Roboters (z. B. Spindel) angebracht.
Wählen Sie CAM – Fräswerkzeugbibliothek oder das entsprechende Symbol in der CAM-Symbolleiste, um die Bibliothek der Fräser anzuzeigen.

Das Fenster der Bibliothek enthält drei Registerkarten zur Angabe von Werkzeugen, Doren und Haltern in Tabellenform.
Wenn Ihre RoboDK-Station bereits Roboterwerkzeuge (Fräser) enthält, werden diese im Fenster „Fräserwerkzeugbibliothek” angezeigt. Wenn sich keine Fräser in der Station befinden, können Sie diese direkt im Fenster „Fräserwerkzeugbibliothek” über die Schaltfläche „Hinzufügen” auf der Registerkarte „Werkzeug” erstellen.
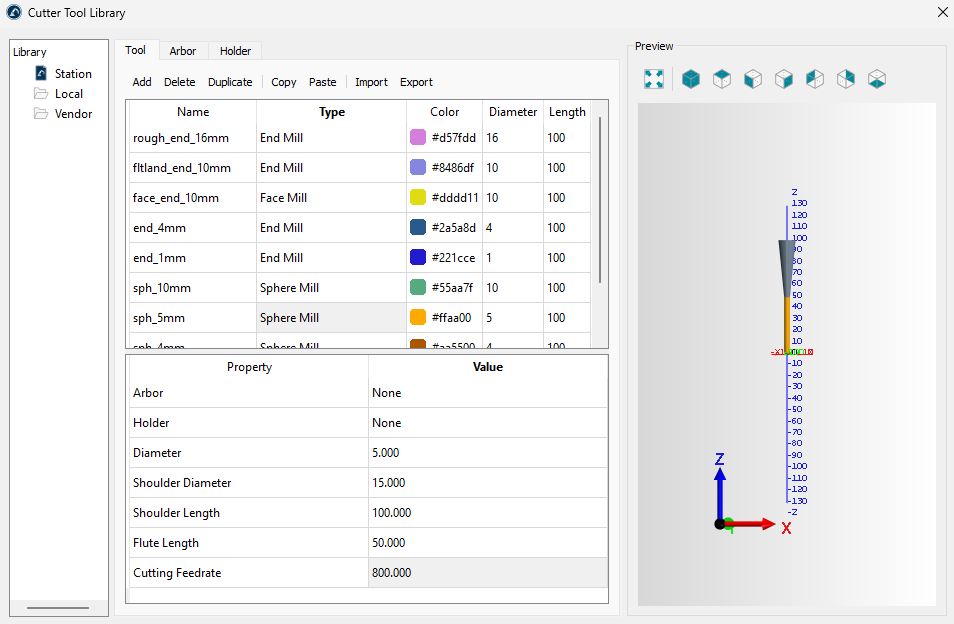
Oben auf der Registerkarte „Werkzeug“ müssen Sie den Werkzeugtyp festlegen. Hier können Sie auch das Werkzeug umbenennen oder die Farbe der Schneide festlegen. Um die entsprechenden Felder zu ändern, doppelklicken Sie darauf.
Im unteren Bereich der Registerkarte „Werkzeug“ werden die Parameter des aktuellen Werkzeugs bearbeitet. Für verschiedene Werkzeugtypen stehen unterschiedliche Parametersätze zur Verfügung. Ein Schaftfräser verfügt beispielsweise nur über drei Hauptparameter: Durchmesser, Schulterlänge, Nutlänge und Geschwindigkeit beim Schneiden.
Hinweis: Die Schulterlänge umfasst die Länge des Teils zum Schneiden (Nutenlänge).
Hinweis: Der Wert für die Geschwindigkeit beim Schneiden wird bei der Auswahl eines Werkzeugs auf das entsprechende Feld in den CAM-Projekteinstellungen angewendet.
Die Werkzeugdorne und Werkzeughalter werden in den entsprechenden Registerkarten des Fensters „Fräswerkzeugbibliothek“ definiert.
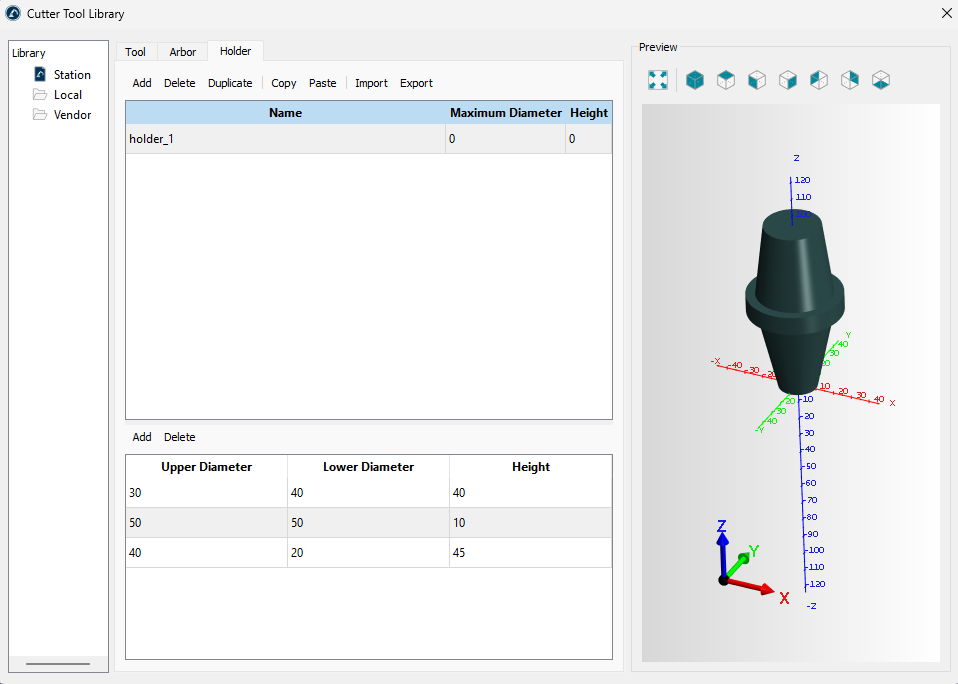
Ein Werkzeugschaft oder -halter wird üblicherweise durch eine Reihe von miteinander verbundenen Kegeln dargestellt. Im unteren Teil der Registerkarte „Dorn“ oder „Halter“ können Sie die geometrischen Parameter der Kegel festlegen, aus denen ein Schaft bzw. ein Halter besteht. Mehrere Werkzeuge können gleichzeitig denselben Halter oder Schaft verwenden.
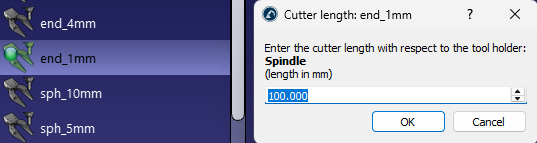
Ein Roboterwerkzeug zum Schneiden ist in RoboDK ebenfalls ein Fräser. Wenn Sie über einen Fräser verfügen, können Sie den TCP entlang der Z-Achse des Halters anpassen:
Hinweis: Sie können das Modell des aktiven Schneidwerkzeugs abrufen und es als Modell zum RoboDK-Stationsbaum hinzufügen. Klicken Sie dazu mit der rechten Maustaste auf den Roboter und wählen Sie den Befehl „CAM-Werkzeuggitter abrufen”.