Verbinden Sie den Roboter
Verwenden Sie den Abwärtspfeil auf der Schaltfläche „Roboter verbinden“, um ein Menü mit verfügbaren Robotern aufzurufen und die Simulation mit einem davon zu verbinden. Wenn die Schaltfläche ausgewählt ist (der Roboter ist verbunden), wird durch Drücken der Schaltfläche die Verbindung des Roboters zur Simulation getrennt.
Die Verknüpfung zwischen dem Roboter und der Simulation kann auch über das Kontextmenü im Stationsbaum vorgenommen werden.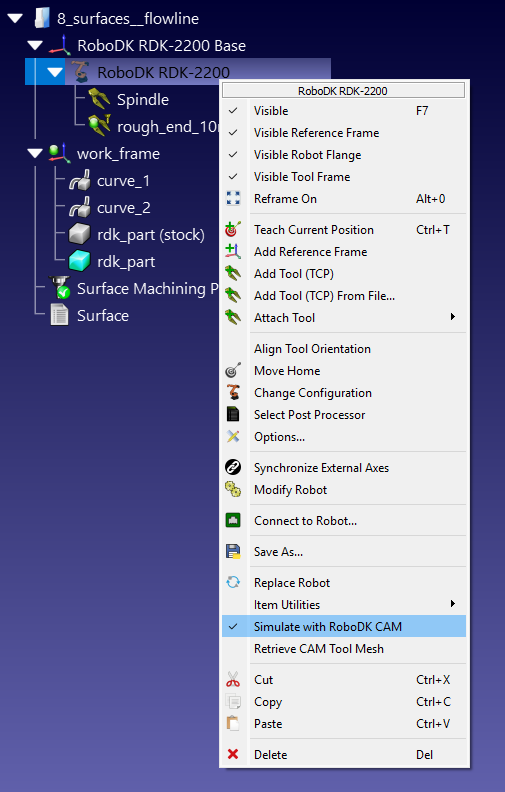
Sobald der Roboter mit der Simulation verknüpft ist, werden alle Roboterbewegungen im RoboDK-Fenster vom Simulator als Bewegungen eines Werkzeugs wiederholt. Unabhängig davon, woher diese Bewegung stammt: aus einem RoboDK-Programm, einem Python-Skript oder einer manuellen Bewegung mit der Maus.
Hinweis: Der Befehl zum Verbinden des Roboters ist auch im Menü „CAM-Link Robot“ verfügbar.