Kollisionserkennung
Wählen Sie Werkzeuge Kollisionen prüfen➔
Befolgen Sie diese Schritte, um ein Programm sicher auf Kollisionen zu prüfen:
1.Klicken Sie mit der rechten Maustaste auf ein Programm.
2.Wählen Sie Pfad und Kollisionen prüfen (Umschalt+F5). Mit dieser Option wird schnell geprüft, ob der Pfad durchführbar ist (wie Pfad prüfen - F5), und dann validiert, dass es keine Kollisionen gibt.
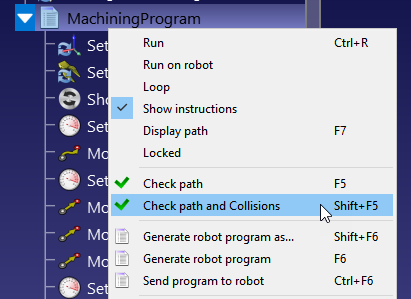
Hinweis: Wenn Sie es vorziehen, die Simulation eines Programms fortzusetzen, auch wenn eine Kollision erkannt wird, können Sie zum Menü Extras➔Optionen➔ Bewegung gehen und die Option Roboterbewegungen stoppen, wenn eine Kollision erkannt wird, deaktivieren.
Kollisionskarte
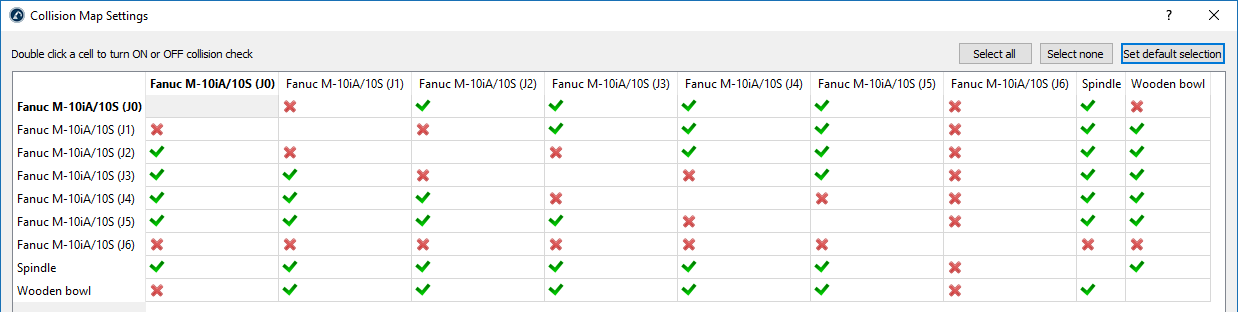
Es ist möglich, festzulegen, ob die Interaktion zwischen einem beliebigen Objektpaar auf Kollisionen geprüft werden soll, indem Sie Werkzeuge➔
Standardmäßig prüft RoboDK Kollisionen zwischen allen beweglichen Objekten in der Station, einschließlich aller Roboterverbindungen, Objekte und Werkzeuge. Als Ausnahme werden aufeinander folgende Robotergelenke nicht auf Kollisionen geprüft, da sie sich immer berühren können.
Schnellere Kollisionserkennung
Die Geschwindigkeit der Kollisionserkennung hängt stark von den folgenden Faktoren ab:
1.Die Anzahl der in der Kollisionskarte definierten Prüfpaare. Eine Kollisionskarte mit weniger Prüfungen ist schneller.
2.Der für die Kollisionsprüfung verwendete Roboterschritt. Der Kollisionsschritt kann im Menü Extras➔Optionen➔Bewegung geändert werden. Lineare Bewegungen verwenden den Schritt in Millimetern und Gelenkbewegungen verwenden den Schritt in Grad. Ein größerer Schritt ermöglicht eine schnellere Kollisionsprüfung, aber das Ergebnis kann weniger genau sein.
3.Computerleistung: Mehr Computerleistung (schnellere CPU) und mehr Verarbeitungs-Threads ermöglichen Ihnen eine schnellere Kollisionsprüfung.
4.Die Komplexität der 3D-Dateien. Geometrien mit einem höheren Detaillierungsgrad, wie z. B. abgerundete Bereiche, erfordern in der Regel mehr Rechenleistung. Die Vereinfachung dieser Geometrien und die Reduzierung der Anzahl der Dreiecke hilft Ihnen, die Kollisionsprüfung zu beschleunigen.