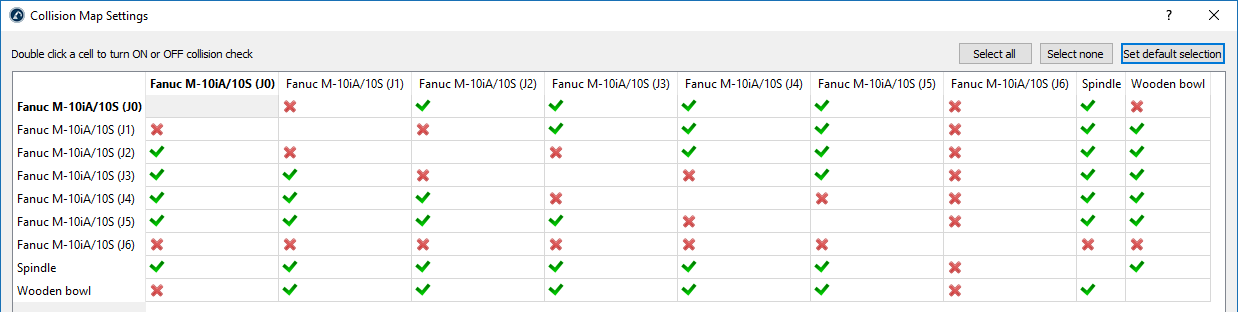
Es ist möglich, festzulegen, ob die Interaktion zwischen einem beliebigen Objektpaar auf Kollisionen geprüft werden soll, indem Sie Werkzeuge➔ Kollisionskarte wählen. Dies öffnet ein neues Fenster, in dem alle Beziehungen und der Zustand der Kollisionsprüfung angezeigt werden. Doppelklicken Sie auf eine Zelle, um die Kollisionsprüfung für diese Beziehung zu aktivieren oder zu deaktivieren. Wählen Sie Standardauswahl festlegen, um automatisch eine konservative Auswahl einzurichten.
Standardmäßig prüft RoboDK Kollisionen zwischen allen beweglichen Objekten in der Station, einschließlich aller Roboterverbindungen, Objekte und Werkzeuge. Als Ausnahme werden aufeinander folgende Robotergelenke nicht auf Kollisionen geprüft, da sie sich immer berühren können.
Tipp: Doppelklicken Sie auf den Fall in der Diagonale, um Kollisionen für ein bestimmtes Objekt mit allen anderen Objekten zu prüfen/abzuwählen.
Tipp: Wenn die Simulation wegen der Kollisionsprüfung verlangsamt wird, kann es besser sein, die Anzahl der Prüfungen zu reduzieren, um weniger Rechnerleistung für die Kollisionsprüfung zu verbrauchen.