Neue Ziele zur Karte hinzufügen
Jedes neue Ziel kann der PRM-Roadmap hinzugefügt werden, ohne dass die gesamte Karte neu erstellt werden muss. Das bedeutet, dass die Roadmap nur dann vollständig neu generiert werden muss, wenn dem Arbeitsbereich neue Objekte hinzugefügt oder bestehende Objekte verschoben werden.
Wenn der Roadmap ein neues Ziel hinzugefügt wird, versucht der PRM-Algorithmus, dieses mit einer Reihe von bestehenden Punkten, die sich bereits in der Roadmap befinden, durch eine Reihe neuer Kanten zu verbinden. Es ist möglich, für neue Ziele eine andere Standardanzahl von Kanten festzulegen als die für die anfängliche Konstruktion der Roadmap gewählte Anzahl.
Die maximale Anzahl von Kanten für neue Ziele kann nach folgendem Verfahren festgelegt werden
1.Öffnen Sie den Bereich Kollisionsfreier Bewegungsplaner, indem Sie entweder zum Menü Dienstprogramme➔Kollisionsfreier Bewegungsplaner Kollisionsfreie Karte➔erstellen gehen oder auf den kleinen Pfeil neben Kollisionen prüfen
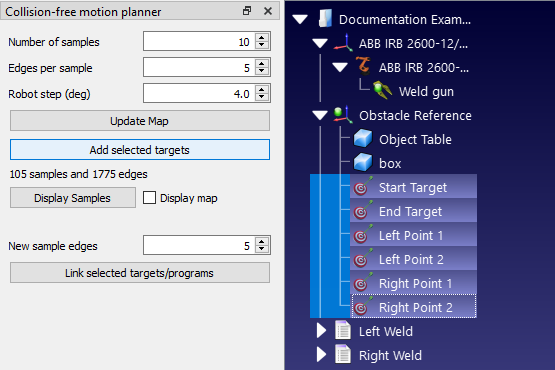
2.Geben Sie die Anzahl der Kanten in das Feld Neue Probenkanten ein. Die Voreinstellung ist 5.
Es gibt zwei Möglichkeiten, der Roadmap neue Ziele hinzuzufügen:
1.Wählen Sie die Ziele im Stationsbaum aus. Mehrere benachbarte Ziele können auf einmal ausgewählt werden, indem Sie auf das höchste Ziel klicken, die Umschalttaste gedrückt halten und dann auf das niedrigste Ziel klicken. Mehrere nicht benachbarte Ziele können ausgewählt werden, indem Sie die Strg-Taste gedrückt halten. Klicken Sie dann im kollisionsfreien Bewegungsplaner-Panel auf Ausgewählte Ziele hinzufügen.
2.Verwenden Sie einfach die gleiche Methode, um ausgewählte Ziele zu verknüpfen oder ausgewählte Programme zu verknüpfen, die in den vorhergehenden Abschnitten (Ziele verknüpfen und Programme verknüpfen) beschrieben wurden. Jedes Ziel, das nicht bereits in der Roadmap vorhanden ist, wird automatisch hinzugefügt.