Roadmap erzeugen
Die "Konstruktionsphase" des Bewegungsplaners wird durch den folgenden Prozess erreicht, der eine Roadmap des Arbeitsbereichs des Roboters generiert:
1.Öffnen Sie den Bereich Kollisionsfreier Bewegungsplaner, indem Sie entweder zum Menü Dienstprogramme➔Kollisionsfreier Bewegungsplaner Kollisionsfreie Karte➔erstellen gehen oder auf den kleinen Pfeil neben Kollisionen prüfen
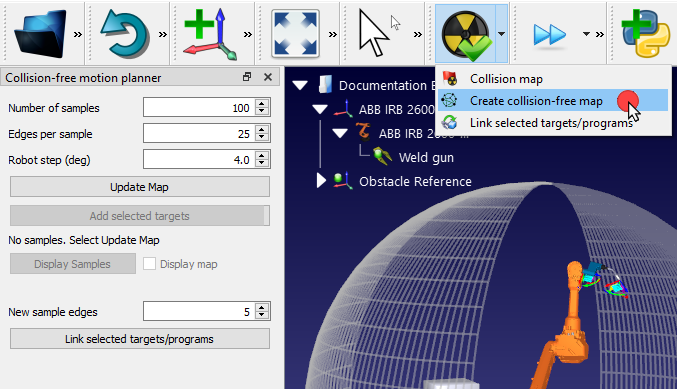
2.Geben Sie neue Parameter ein oder behalten Sie die Standardeinstellungen bei.
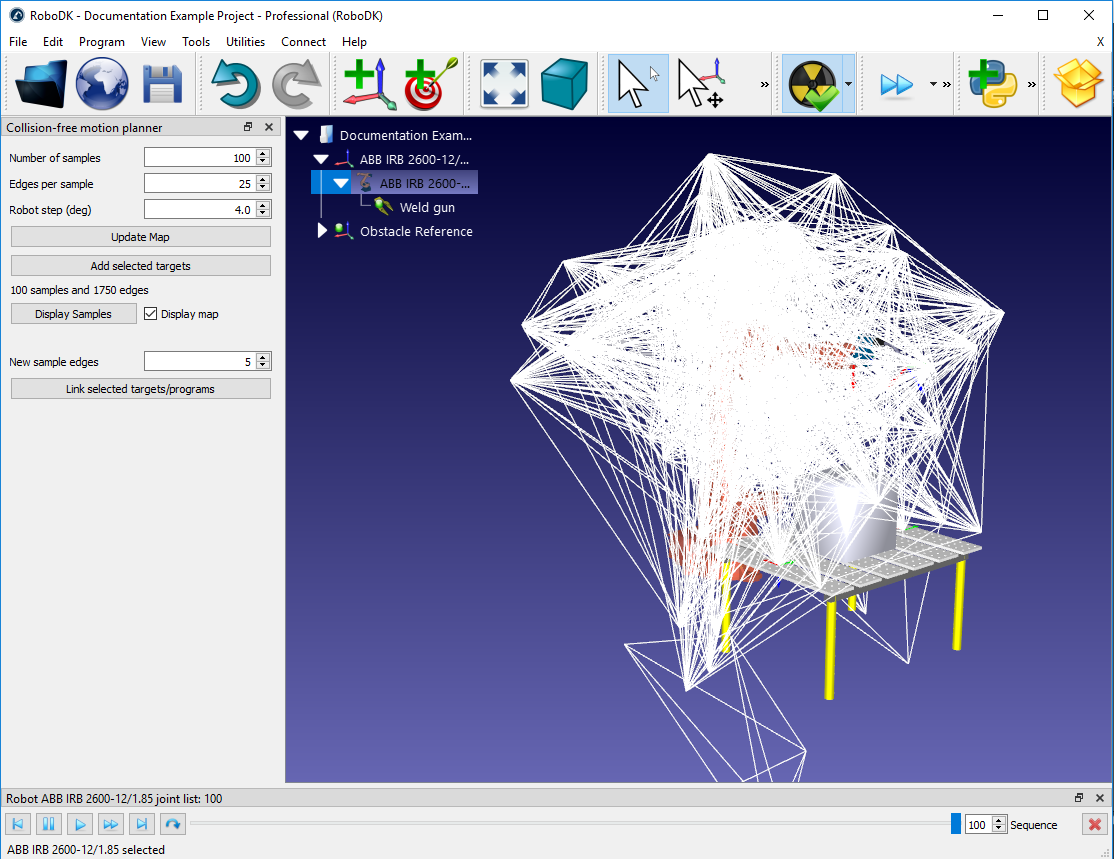
3.Klicken Sie auf Karte aktualisieren, um die Roadmap zu generieren.
Der PRM-Algorithmus generiert dann unter Verwendung der gewählten Parameter eine Roadmap. Wenn sie fertig ist, kann die generierte Roadmap angezeigt werden, indem Sie das Kästchen Karte anzeigen markieren. Wenn Sie auf Muster anzeigen klicken, bewegt sich der Roboter durch alle Muster innerhalb des Arbeitsbereichs.