Hand-Augen-Kalibrierung
Bei der Hand-Auge-Kalibrierung wird die Position der Kamera in Bezug auf den Roboterflansch oder das Werkzeug kalibriert.
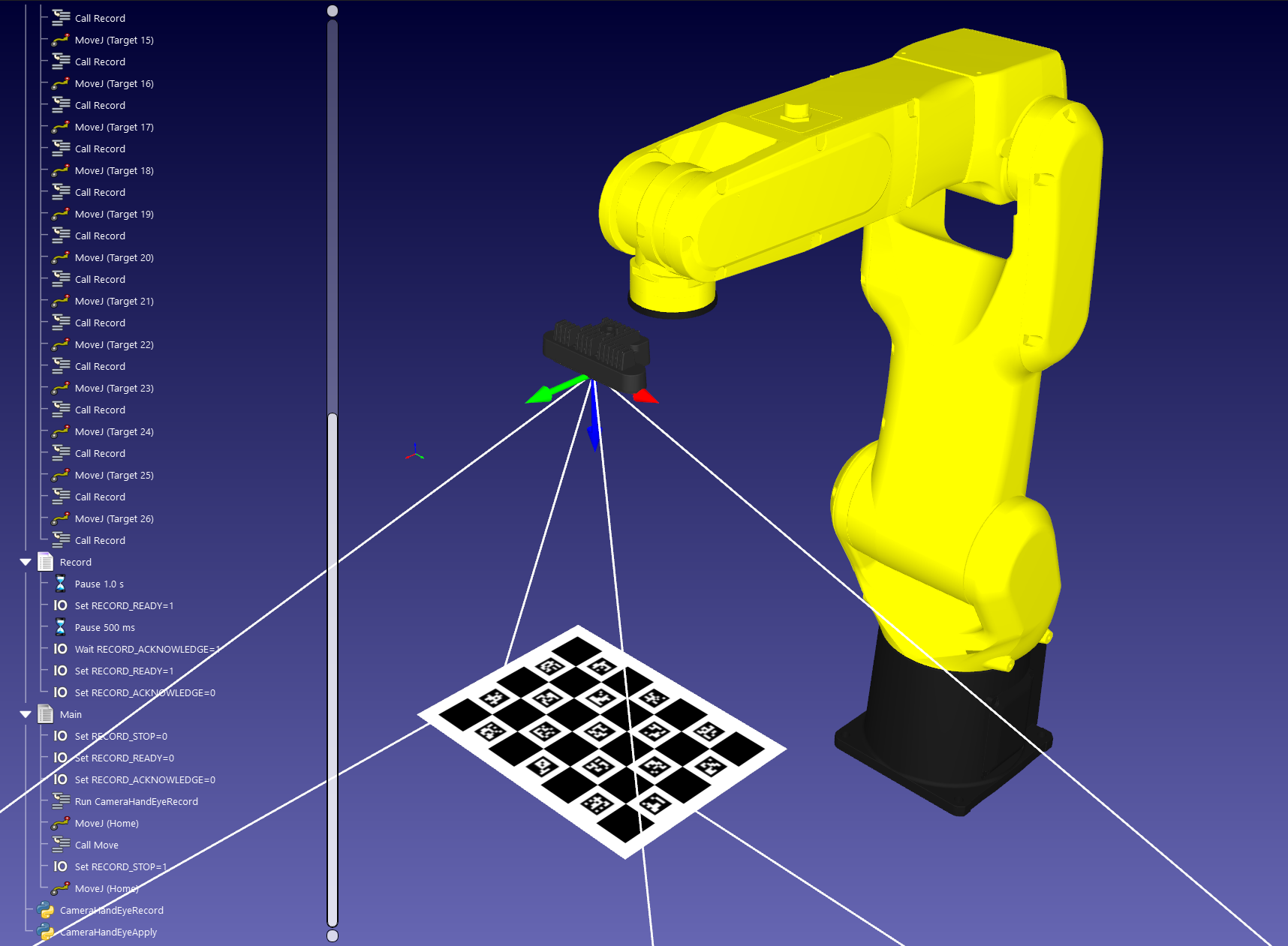
Mit RoboDK können Sie den Prozess der Hand-Augen-Kalibrierung simulieren. Sie können das gleiche Verfahren verwenden, um echte Kameras in Bezug auf den Roboterflansch oder das Werkzeug zu kalibrieren.
Ein vollständig funktionierendes Beispiel finden Sie im Abschnitt Beispiele der RoboDK API für Python: https://robodk.com/doc/en/PythonAPI/examples.html#camera-hand-eye-calibration.