Roboter-Bearbeitung in RoboDK
Sobald der Roboterbearbeitungspfad in RoboDK importiert wurde, sollten Sie sehen, dass der Roboterbearbeitungspfad an die Formreferenz Ihrer RoboDK-Station angehängt ist. Vergewissern Sie sich unter
Sie können auch den Wert der An- und Abfahrbewegungen vor und nach dem Schneidepfad anpassen. Ein Wert von 100 mm sollte in diesem Beispiel in Ordnung sein. Wenn die Gefahr von Kollisionen besteht, können Sie die Werte innerhalb des Arbeitsbereichs des Roboters beliebig erhöhen.
Im nächsten Schritt überprüfen Sie, ob die Reihenfolge, in der die Pfadabschnitte ausgeführt werden, korrekt ist, indem Sie
Hinweis: Sie können eine Simulation in RoboDK ganz einfach beschleunigen, indem Sie die Leertaste gedrückt halten oder die Schaltfläche
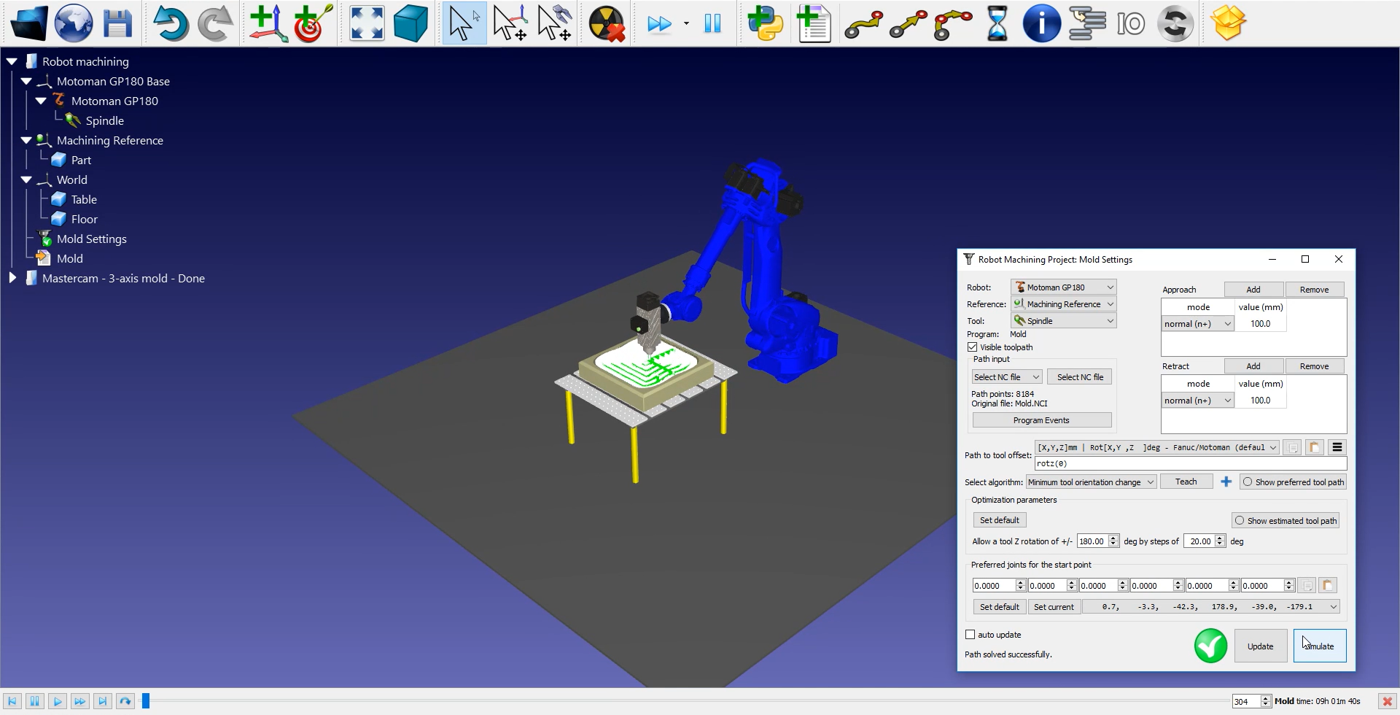
Hinweis: Sie können die Ausrichtung Ihres Werkzeugs entlang des Pfades anpassen. In diesem Beispiel ist die einzige Änderung, die Sie wünschen könnten, eine Drehung des Werkzeugs um seine Z-Achse, aber die Standardausrichtung wird empfohlen.
Folgen Sie diesen Schritten, um die Ausrichtung des Werkzeugs anzupassen:
1.Doppelklicken Sie auf die
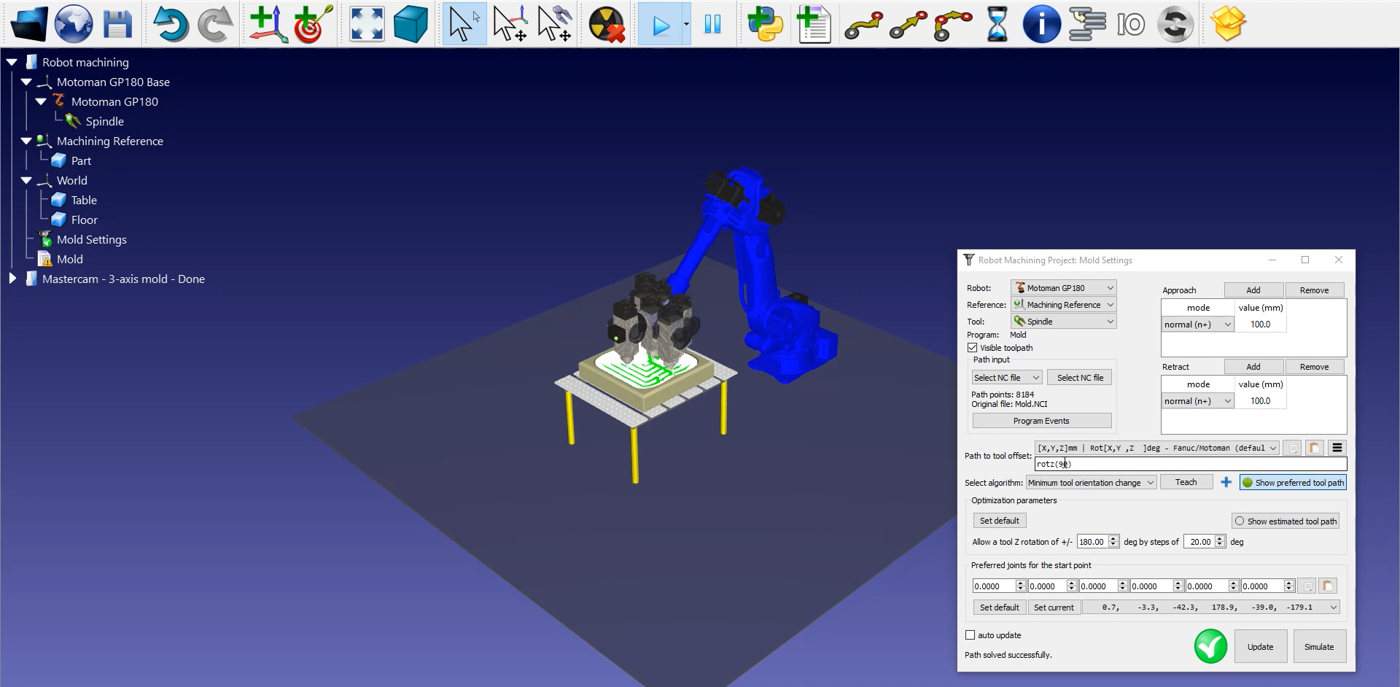
2.Wählen Sie Bevorzugten Werkzeugpfad anzeigen. Es erscheinen einige Geisterwerkzeuge, wie in der Abbildung unten gezeigt. Diese stellen die Position Ihres Werkzeugs entlang des Pfades dar.
3.Ändern Sie den Wert für rotz (0), indem Sie Ihr Rad bis zu 90 Grad nach oben drehen. Sie werden sehen, wie sich der Rotzwert ändert und die Position des Geistertolls sich mit ihm ändert.
4.Wählen Sie Aktualisieren➔ Simulieren.
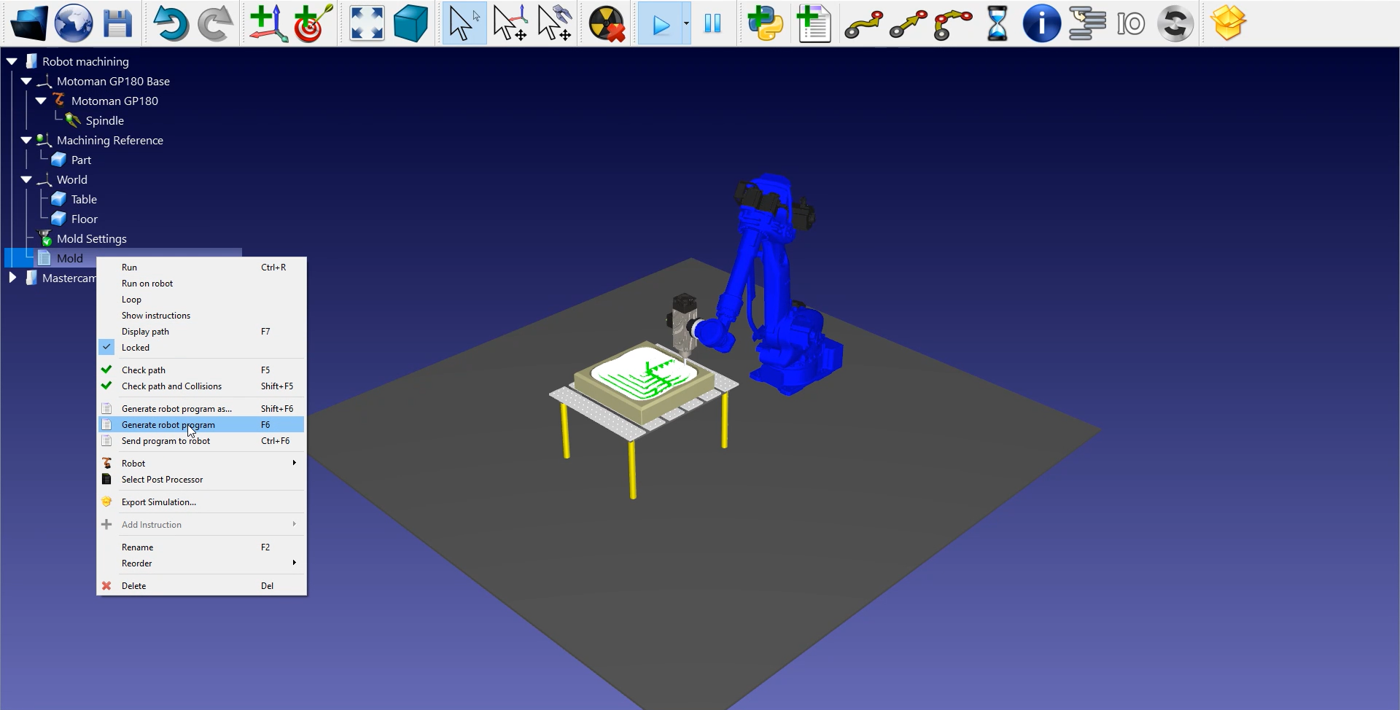
Um Ihr Roboterprogramm zu erstellen, müssen Sie den richtigen Postprozessor verwenden. Doppelklicken Sie auf den Roboter
Klicken Sie schließlich mit der rechten Maustaste auf
Die Motoman JBI-Datei ist nun bereit, auf Ihre Robotersteuerung übertragen zu werden.