Werkzeugweg für die Bearbeitung in Mastercam
Öffnen Sie Ihr 3D-Objekt in Mastercam und starten Sie die Schnittsimulation. In diesem Beispiel handelt es sich bei dem 3D-Objekt um ein Formteil aus Metall mit einem bereits mit Mastercam-Werkzeugen erstellten Schneidpfad
Um dieses Beispiel zu vereinfachen, wurde die Anzahl der Durchgänge, die zur Bearbeitung dieses Teils erforderlich sind, stark reduziert. In Wirklichkeit würden Sie viel mehr Linien oder Schneidpfade in der Form haben, so dass Sie das Werkzeug nicht wirklich in Aktion sehen können.
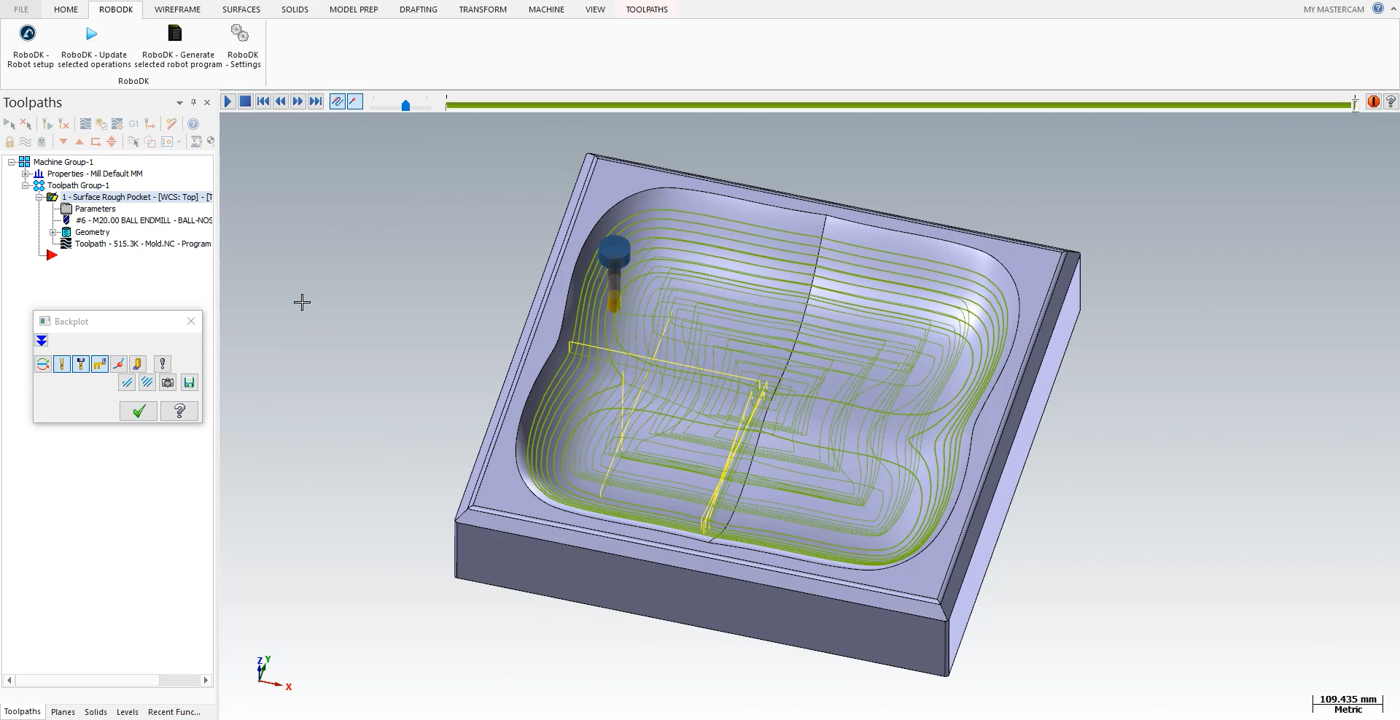
Die Mastercam-Schnittsimulation zeigt Ihnen jede Bewegung, die das Werkzeug während des Programms ausführen muss.
Folgen Sie den nächsten Schritten, um Ihr Teil in RoboDK zu laden:
1.Wählen Sie die Registerkarte RoboDK und wählen Sie RoboDK - Robotereinrichtung.
2.Wählen Sie Teil laden.
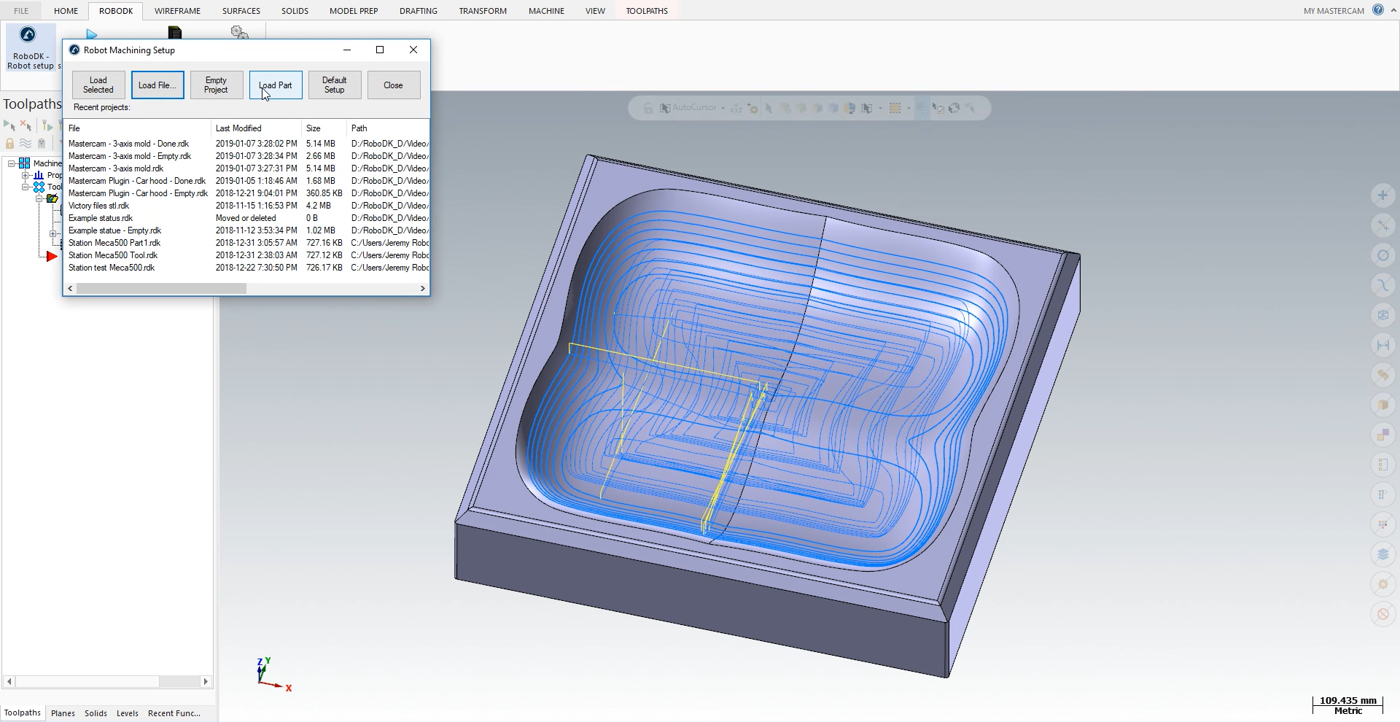
Sie sollten das Teil auf dem aktiven Referenzrahmen (Bearbeitungsreferenz) auf dem Tisch der RoboDK Station geladen sehen.
Der nächste Schritt besteht darin, den Schneidpfad aus Mastercam in RoboDK zu importieren.
1.Wählen Sie in Mastercam die Registerkarte RoboDK.
2.RoboDK auswählen - Ausgewählte Vorgänge aktualisieren.
3.Gehen Sie zu RoboDK.