Anpassen der Werkzeugausrichtung
Die meisten Bearbeitungs- oder Fertigungsvorgänge beinhalten eine 5-Achsen-Beschränkung. Während die Position des Werkzeugs (TCP) und der Schneideachse definiert ist, haben Sie einen zusätzlichen Freiheitsgrad zu definieren, wenn Sie einen 6-achsigen Roboterarm verwenden. Dieser Freiheitsgrad ermöglicht es uns, die Schneidachse zu drehen und automatisch Singularitäten und Achsenbegrenzungen zu vermeiden.
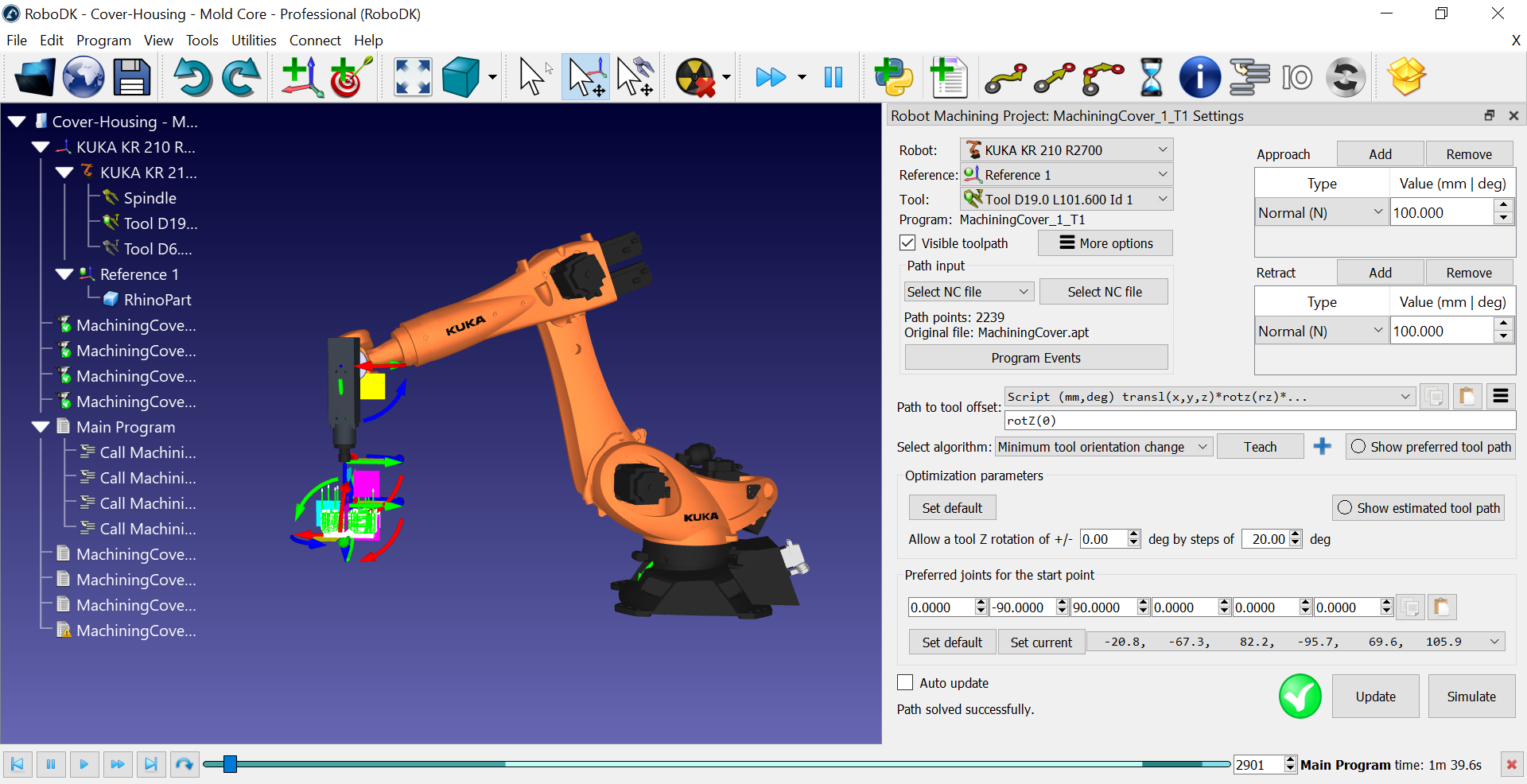
Am einfachsten können Sie die Werkzeugausrichtung anpassen, indem Sie im Roboterbearbeitungsprojekt die Schaltfläche Einlernen wählen. Indem Sie Teach wählen, teilen Sie RoboDK mit, dass Sie der aktuellen Werkzeugausrichtung folgen möchten, so dass die Einstellungen an diese Ausrichtung angepasst werden.
Wenn Sie die Option Bevorzugten Werkzeugpfad anzeigen wählen, können wir eine Vorschau der Werkzeugausrichtung anzeigen, der der Roboter zu folgen versucht.
Sie können Aktualisieren und Simulieren wählen, um das Ergebnis zu sehen.
Die Optimierungsparameter ermöglichen es dem Roboter, die Werkzeugausrichtung automatisch zu ändern, wenn der Roboter die bevorzugte Ausrichtung nicht erreichen kann. Dieser Parameter ist wichtig, wenn Sie ein großes Teil haben, wenn Sie in der Nähe einer Singularität oder an den Grenzen des Roboterarbeitsbereichs arbeiten. Wenn Sie eine rote Markierung sehen, bedeutet dies, dass der Roboter die Operation nicht durchführen kann.
Wenn Sie Geschätzten Werkzeugpfad anzeigen wählen, sollten Sie die erreichbaren Positionen in Grün sehen. Dies gibt Ihnen einen Hinweis darauf, wie die Ausrichtung aussehen wird, damit der Pfad machbar ist. Das bedeutet, dass wir den zusätzlichen Freiheitsgrad nutzen, um automatisch Roboter-Singularitäten und Achsenbegrenzungen zu vermeiden.