Bearbeitungsprogramm in RhinoCAM
In diesem Abschnitt wird gezeigt, wie Sie einen Bearbeitungsauftrag aus der Mecsoft RhinoCAM-Software in RoboDK exportieren können. Eine APT-Datei wird verwendet, um den Werkzeugweg in RoboDK zu laden und automatisch über eine benutzerdefinierte BAT-Datei zu senden.
Folgen Sie diesen Schritten in RhinoCAM, um den Bearbeitungsauftrag in RoboDK zu exportieren:
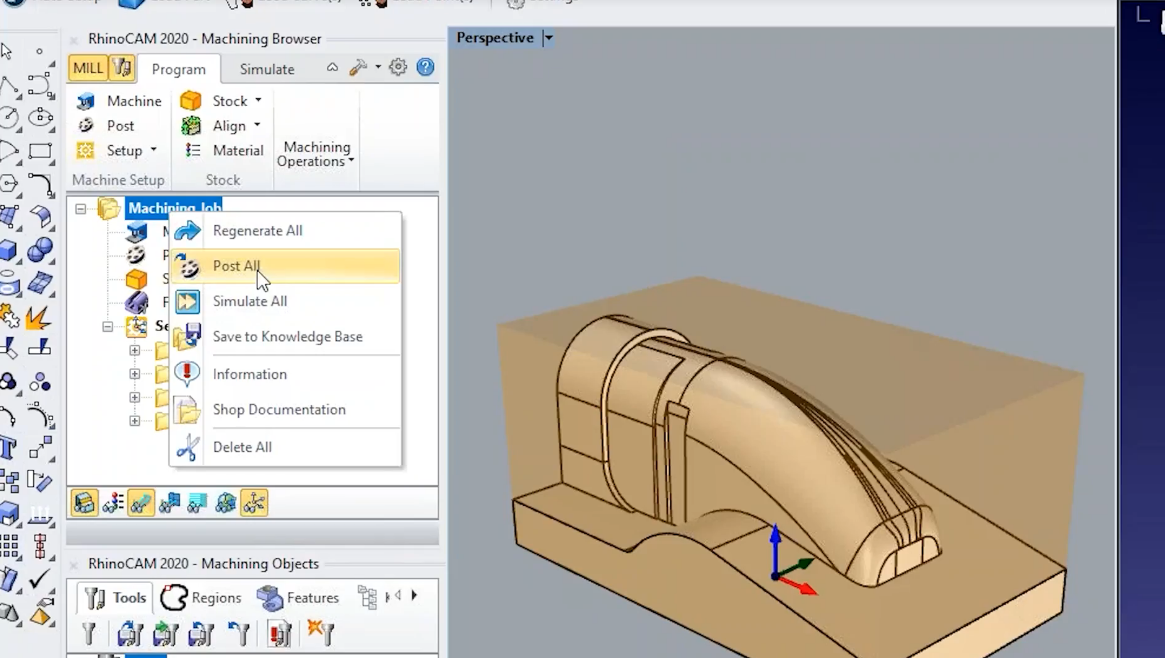
1.Klicken Sie mit der rechten Maustaste auf Ihr Bearbeitungsprojekt aus RhinoCAM.
2.Wählen Sie Post All, um die Bearbeitungsprogramme zu generieren und alles automatisch in RoboDK zu laden.
Sie sehen, dass RoboDK das Roboter-Bearbeitungsprogramm automatisch in dieselben 4 Bearbeitungsschritte aufteilt, die wir in der CAM-Software erstellt haben.
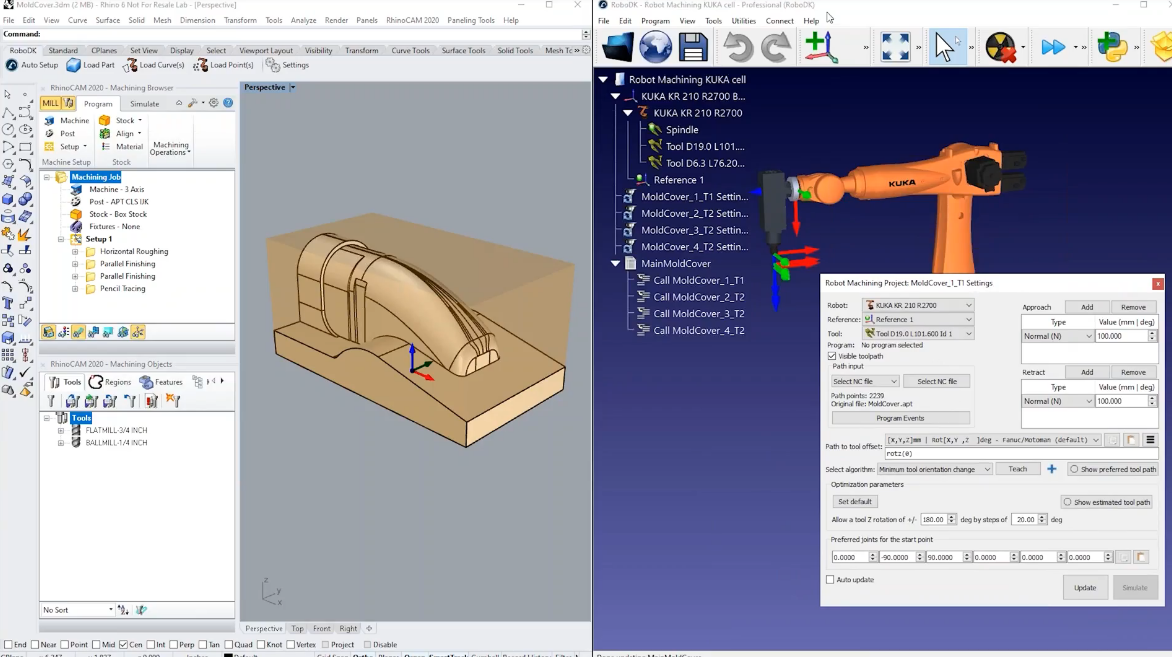
Das Roboterbearbeitungsprojekt wird mit einer Standard-Roboterzelle erstellt, die wir anpassen können. In diesem Beispiel verwenden wir einen KUKA Roboter und eine Standardspindel, bei der das Werkzeug (oder TCP) den Werkzeughalter darstellt.
Wenn Sie APT-Programme laden, fügt RoboDK standardmäßig die Werkzeuge hinzu, die Sie in Ihrem Bearbeitungsprojekt definiert haben. Die Werkzeuge werden zu Ihrem aktiven TCP hinzugefügt, wenn Sie die APT-Datei laden. Die richtigen Werkzeuge werden auch in Ihrem Roboter-Bearbeitungsprojekt vorausgewählt.