Roboter-Bearbeitungspfad erstellen
Sie können die Simulation der Roboterbearbeitung in RoboDK erstellen, sobald Sie die APT-Datei geladen haben, indem Sie Aktualisieren wählen. So können Sie sehen, ob der Roboter den Fertigungsvorgang durchführen kann.
Bei diesem Beispiel handelt es sich um eine einfache 3-Achsen-Bearbeitung, bei der die Standardeinstellungen ein gültiges Ergebnis liefern. Mit dem Projekt Roboterbearbeitung können Sie steuern, wie sich der Roboter entlang des Bearbeitungspfads verhält.
Sie können diese Schritte ausführen, um die verbleibenden Roboterbearbeitungen zu aktualisieren:
1.Wählen Sie eine oder mehrere Roboterbearbeitungen aus (wenn Sie die Umschalttaste gedrückt halten, können Sie mehrere Elemente in der Baumstruktur erzeugen).
2.Klicken Sie mit der rechten Maustaste auf den/die ausgewählten Artikel.
3.Wählen Sie Programme aktualisieren.
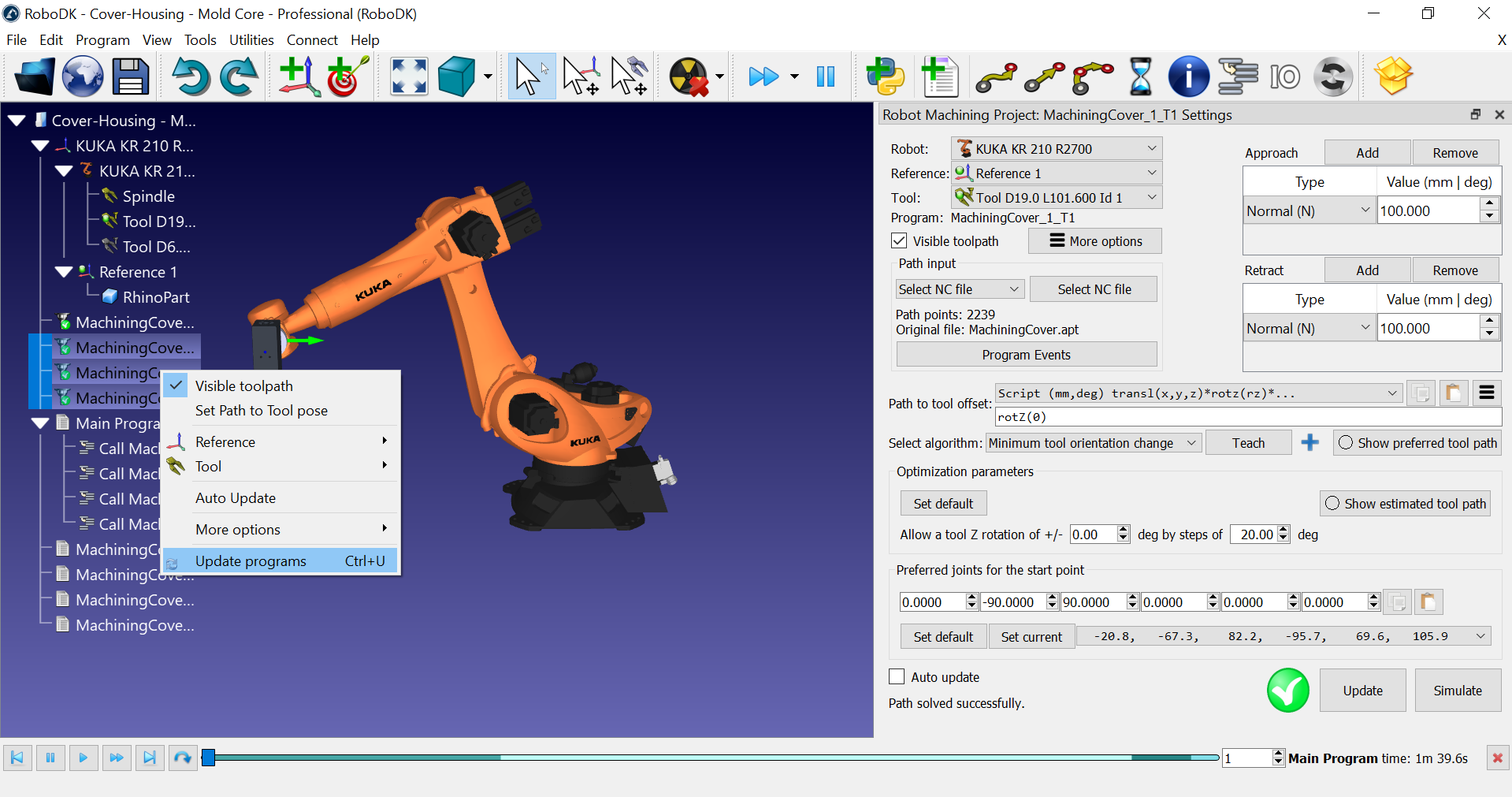
Während RoboDK den Bearbeitungspfad des Roboters berechnet, erstellt es für jeden Bearbeitungsvorgang ein neues Roboterprogramm. Die weißen Symbole stellen Roboterprogramme dar. Diese Programme werden von RoboDK automatisch erstellt. Sie können jedes Programm einzeln simulieren, indem Sie es in der Baumstruktur doppelklicken.
RoboDK erstellt auch automatisch ein Hauptprogramm, das Sie ausführen können, um alle Roboterbearbeitungen der Reihe nach zu simulieren.