Roboterschneiden in RoboDK
Sobald der Roboter-Schneidepfad in RoboDK importiert wurde, sollten Sie sehen, dass der Schneidepfad an die Formreferenz Ihrer RoboDK Station angehängt ist. Vergewissern Sie sich in den
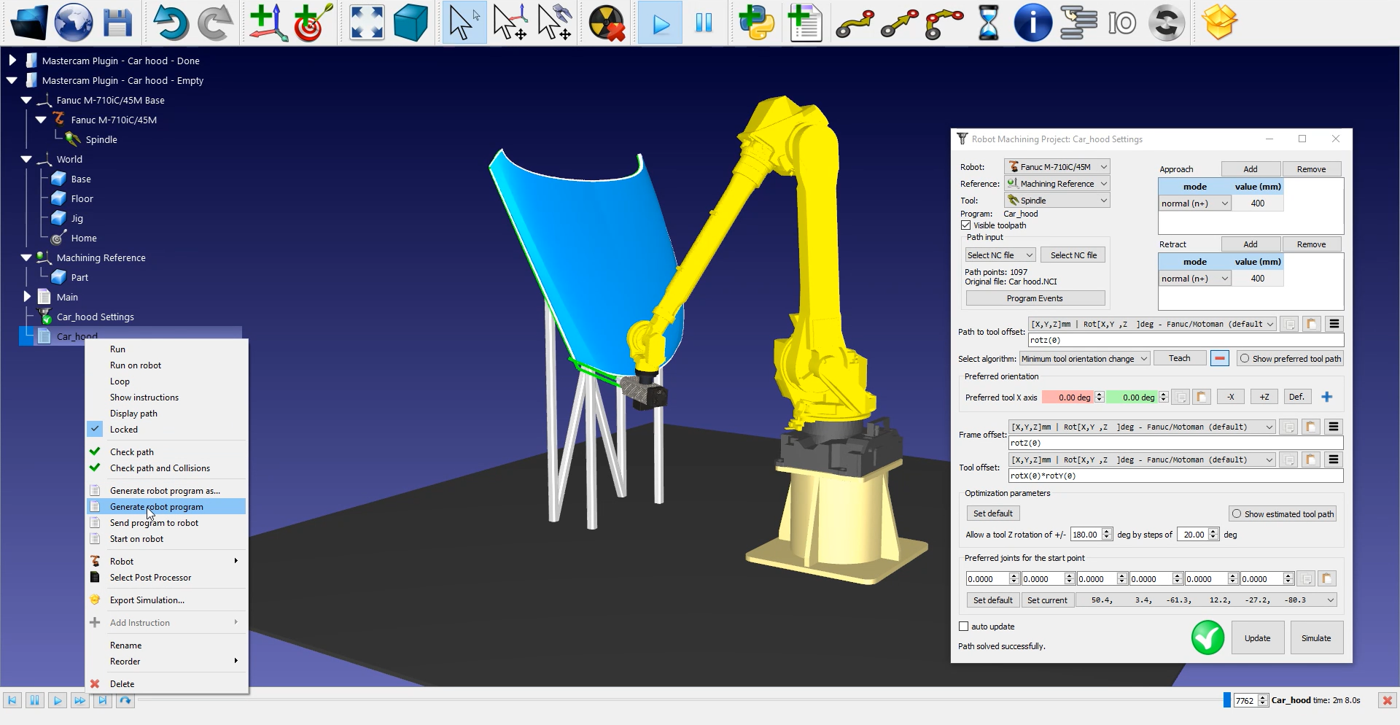
Sie können auch den Wert der Anfahr- und Rückzugsbewegungen vor und nach dem Schneidepfad einstellen. Eine Annäherung/Rückzug von 400 mm sollte in diesem Beispiel sicher sein. Diese Bewegungen sind jetzt 4 Mal länger als die Standard-Annäherung/Rückzug und helfen, eine Kollision mit dem Teil zu vermeiden.
Sie können auch die Ausrichtung des Teils im unteren Bereich des Menüs anpassen.
Im nächsten Schritt überprüfen Sie, ob die Reihenfolge, in der die Streckenabschnitte ausgeführt werden, korrekt ist, indem Sie
Hinweis: Sie können eine Simulation in RoboDK ganz einfach beschleunigen, indem Sie die Leertaste gedrückt halten oder die Schaltfläche

Hinweis: Sie können auch die Schaltfläche Ereignisse programmieren verwenden, um E/As zu aktivieren oder zu deaktivieren, z.B. die Rotation Ihrer Spindel.
Um Ihr Roboterprogramm zu erstellen, müssen Sie den richtigen Postprozessor verwenden. Doppelklicken Sie auf den Roboter
Klicken Sie abschließend mit der rechten Maustaste auf
Die Fanuc LS- und/oder TP-Dateien sind nun bereit, auf Ihre Robotersteuerung übertragen zu werden.