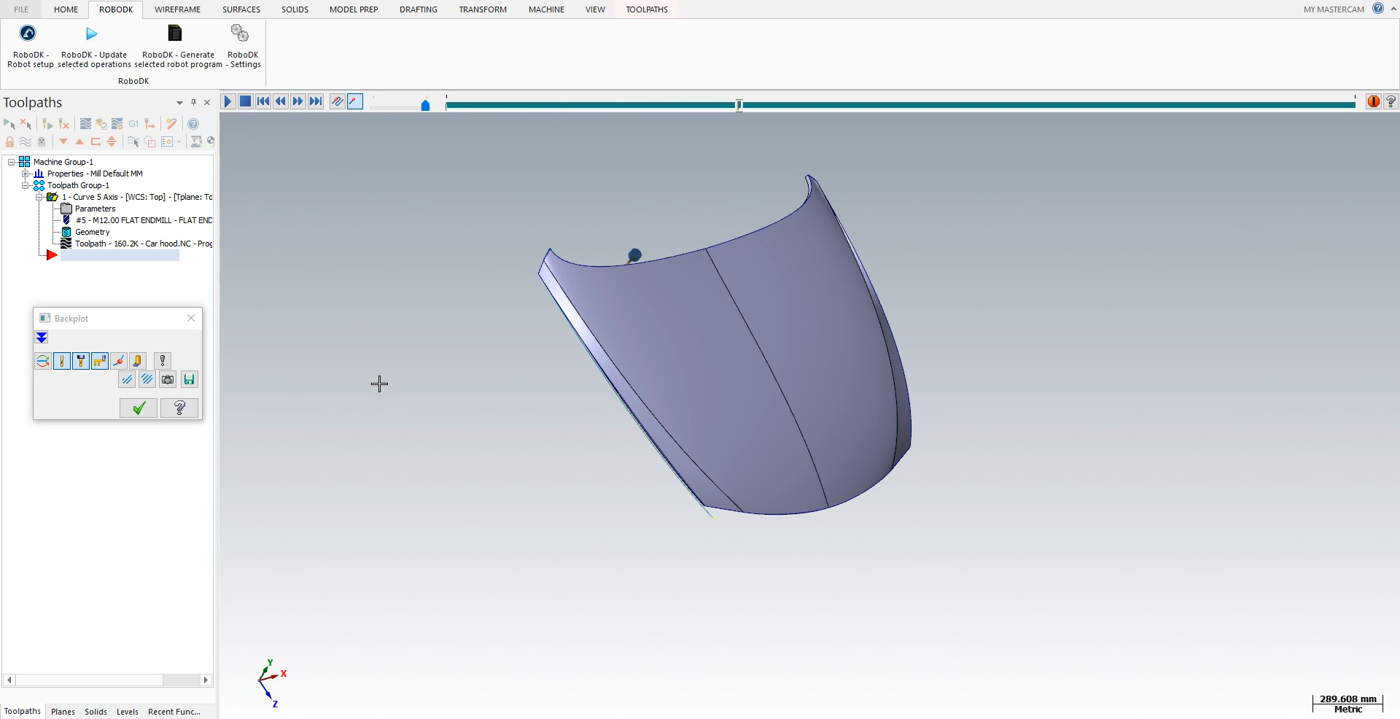
Schneide-Werkzeugweg in Mastercam
Öffnen Sie Ihr 3D-Objekt in Mastercam und starten Sie die Schnittsimulation. Sie können sehen, dass die Software die Ausrichtung des Werkzeugs an die Schnittfläche angepasst hat
Folgen Sie den nächsten Schritten, um Ihr Teil in RoboDK zu laden:
1.Wählen Sie die Registerkarte RoboDK und wählen Sie RoboDK - Robotereinrichtung.
2.Wählen Sie Teil laden.
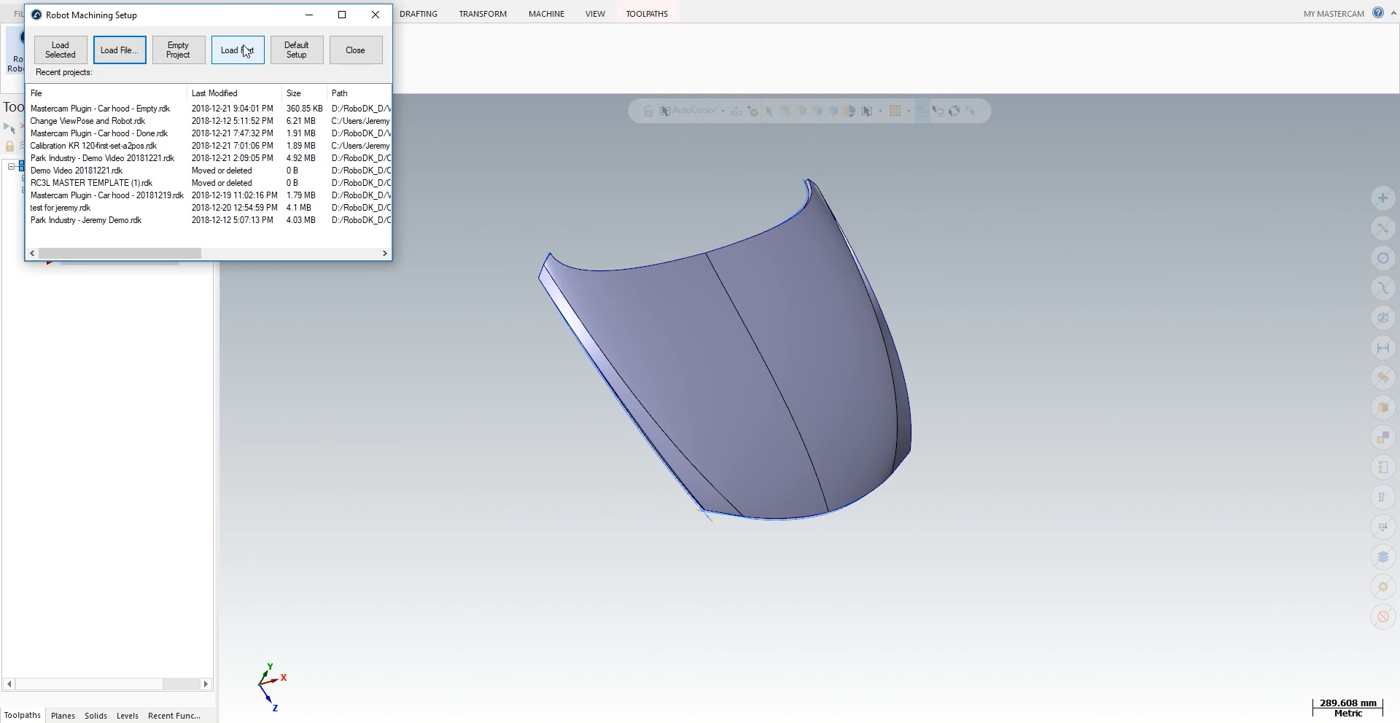
Sie sollten sehen, dass das Teil auf dem aktiven Referenzrahmen (Bearbeitungsreferenz) auf der Vorrichtung der RoboDK Station geladen ist.
Hinweis: Um Ihr Teil an der richtigen Position zu importieren, müssen Sie die Bearbeitungsreferenz an einer bestimmten Position einrichten. Klicken Sie mit der rechten Maustaste auf Bearbeitungsreferenz➔ Sichtbar, um den Rahmen einzublenden. Legen Sie den Ursprung bei der Erstellung Ihres Teils in Mastercam genau an dieser Position fest. Wenn Sie das Teil importieren, wird RoboDK den Ursprung des Teils mit dem Ursprung der Bearbeitungsreferenz abgleichen.
Der nächste Schritt besteht darin, den Schneidpfad von Mastercam in RoboDK zu importieren.
1.Wählen Sie in Mastercam die Registerkarte RoboDK.
2.RoboDK auswählen - Ausgewählte Vorgänge aktualisieren.
3.Gehen Sie zu RoboDK.