Anpassen der Werkzeugausrichtung
Sie können die Werkzeugausrichtung in Ihrem Roboter-Bearbeitungsprogramm leicht anpassen, indem Sie die bevorzugte Ausrichtung einlernen.
In diesem Beispiel konnten wir die Werkzeugausrichtung für die letzten 2 Bearbeitungsvorgänge verbessern:
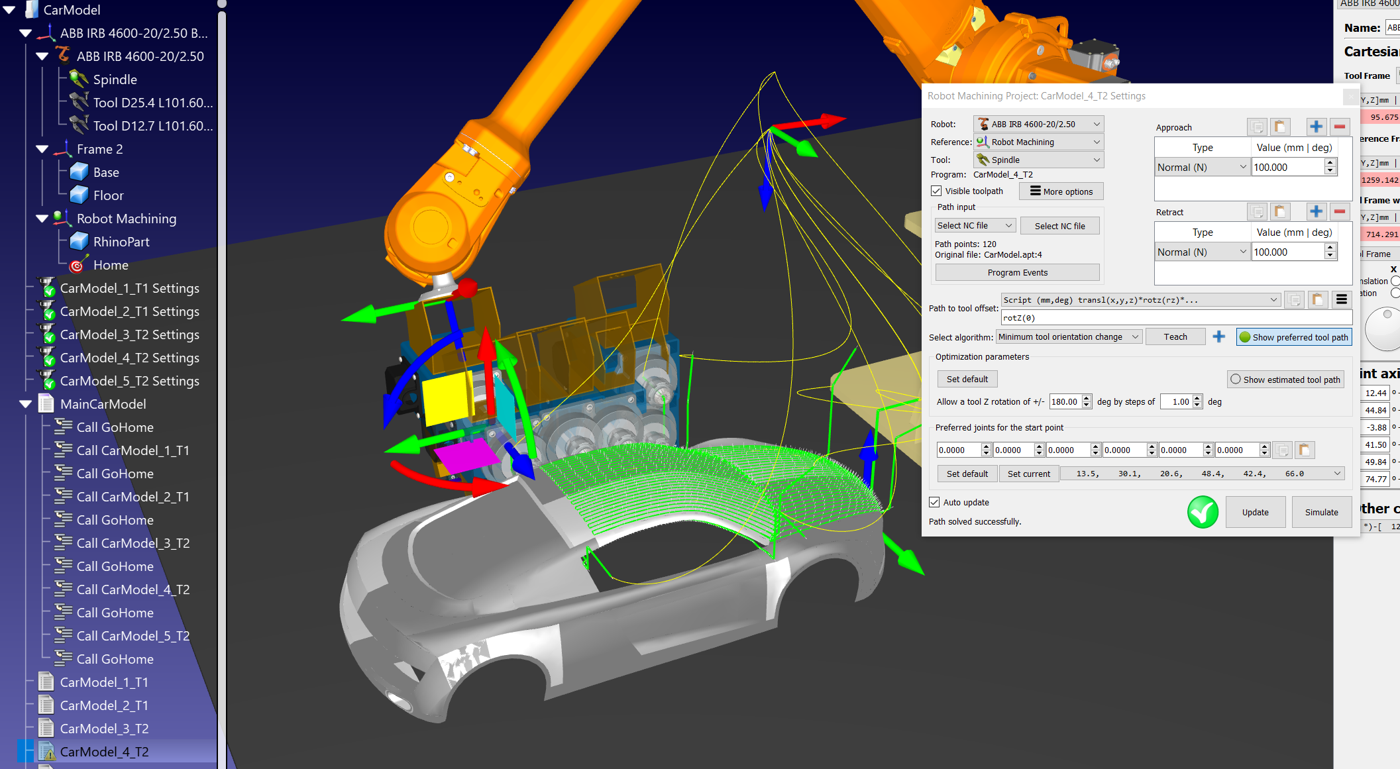
1.Doppelklicken Sie auf die 4te Bearbeitung, um die Roboterbearbeitungseinstellungen für diese Bearbeitung zu öffnen.
2.Wählen Sie Simulieren oder führen Sie das entsprechende Programm aus und halten Sie den Roboter an einem Punkt entlang der Bearbeitungsbahn an.
3.Wählen Sie die Schaltfläche Bevorzugten Werkzeugpfad anzeigen, um die Werkzeugausrichtung zu sehen, der RoboDK versucht, den Roboter folgen zu lassen.
4.Halten Sie die Alt-Taste gedrückt, um das Roboterwerkzeug zu greifen, und greifen Sie den blauen runden Pfeil, der sich um die Z-Achse des Werkzeugs dreht. Bewegen Sie die Ausrichtung des Werkzeugs in eine Richtung, der Sie folgen möchten.
5.Wählen Sie im Menü Roboterbearbeitung die Option Einlernen, um diese Ausrichtung entlang der Bahn zu berücksichtigen. Wenn Sie Teach auswählen, teilen Sie RoboDK mit, dass Sie der aktuellen Werkzeugausrichtung folgen möchten, so dass die Einstellungen an diese Ausrichtung angepasst werden.
6.Wählen Sie Aktualisieren, um den Pfad neu zu berechnen.
Wählen Sie Simulieren, um die Simulation auszuführen (oder doppelklicken Sie auf das generierte Programm).
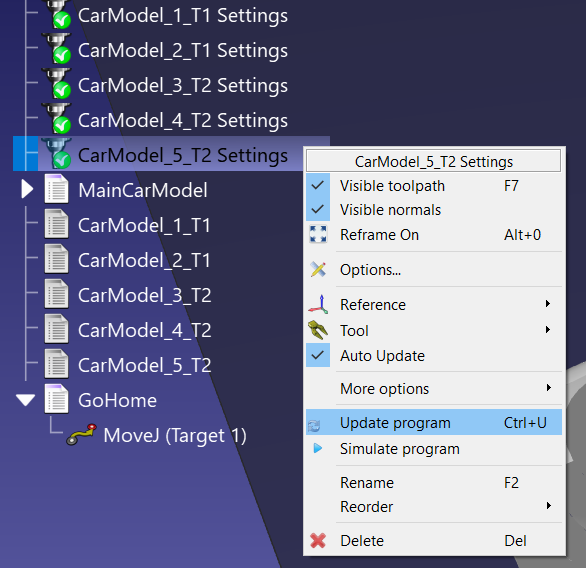
7.Wenn das Ergebnis Ihren Erwartungen entspricht, können Sie die Einstellungen kopieren und in einen anderen Werkzeugweg einfügen: Klicken Sie mit der rechten Maustaste auf die Roboterbearbeitungseinstellungen und wählen Sie Einstellungen kopieren. Klicken Sie dann mit der rechten Maustaste auf die neuen Roboterbearbeitungseinstellungen und wählen Sie Einstellungen einfügen. Klicken Sie erneut mit der rechten Maustaste auf dieses letzte Roboterbearbeitungsprojekt und wählen Sie Programm aktualisieren, um das mit diesem Roboterbearbeitungsauftrag verbundene Programm zu aktualisieren.