Erstellen Sie das Koordinatensystem für die Roboterbearbeitung
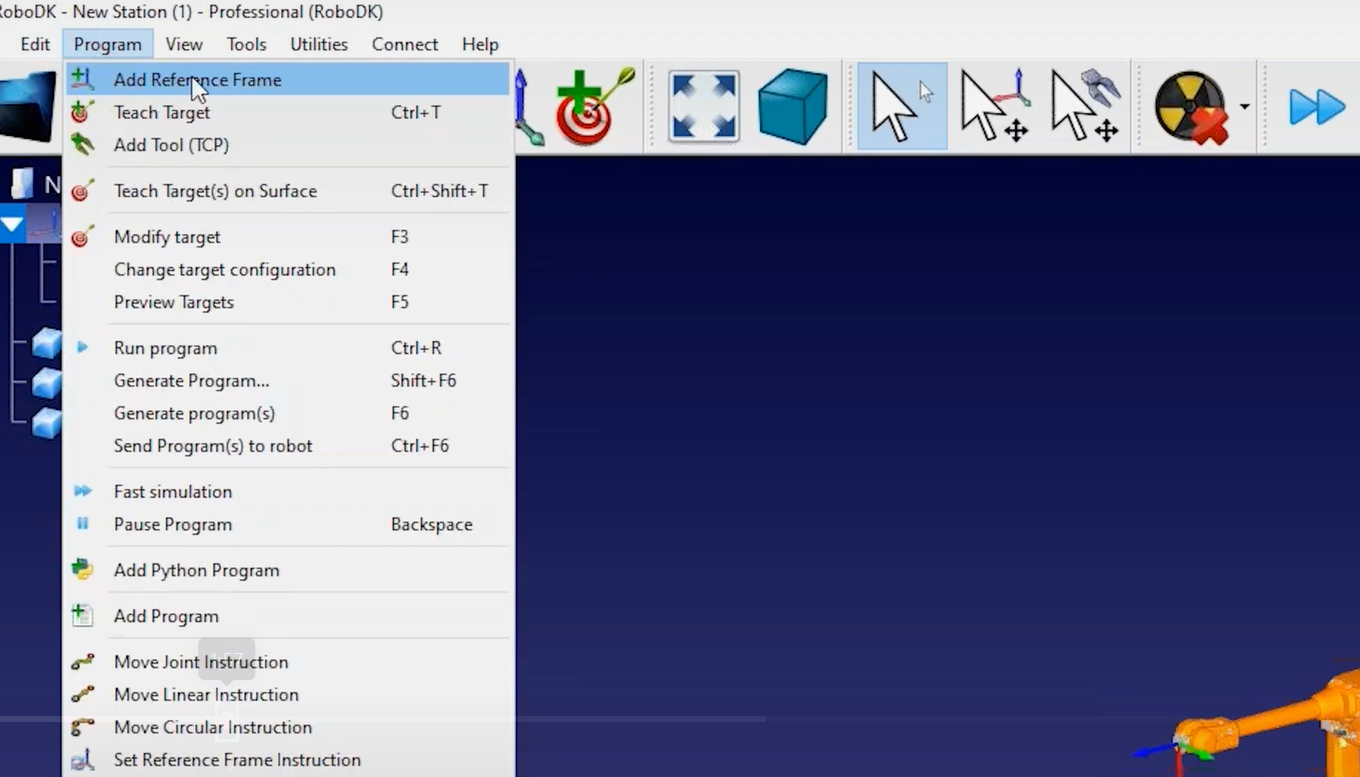
Sie können ein neues Koordinatensystem für Ihre Roboter-Bearbeitungsvorrichtung erstellen, indem Sie das Menü Programm wählen und dann Referenzrahmen hinzufügen.
Hinweis: Sie können die Objekte, die Sie geladen haben, an das neue Koordinatensystem anhängen, indem Sie sie innerhalb des Baums ziehen und ablegen.
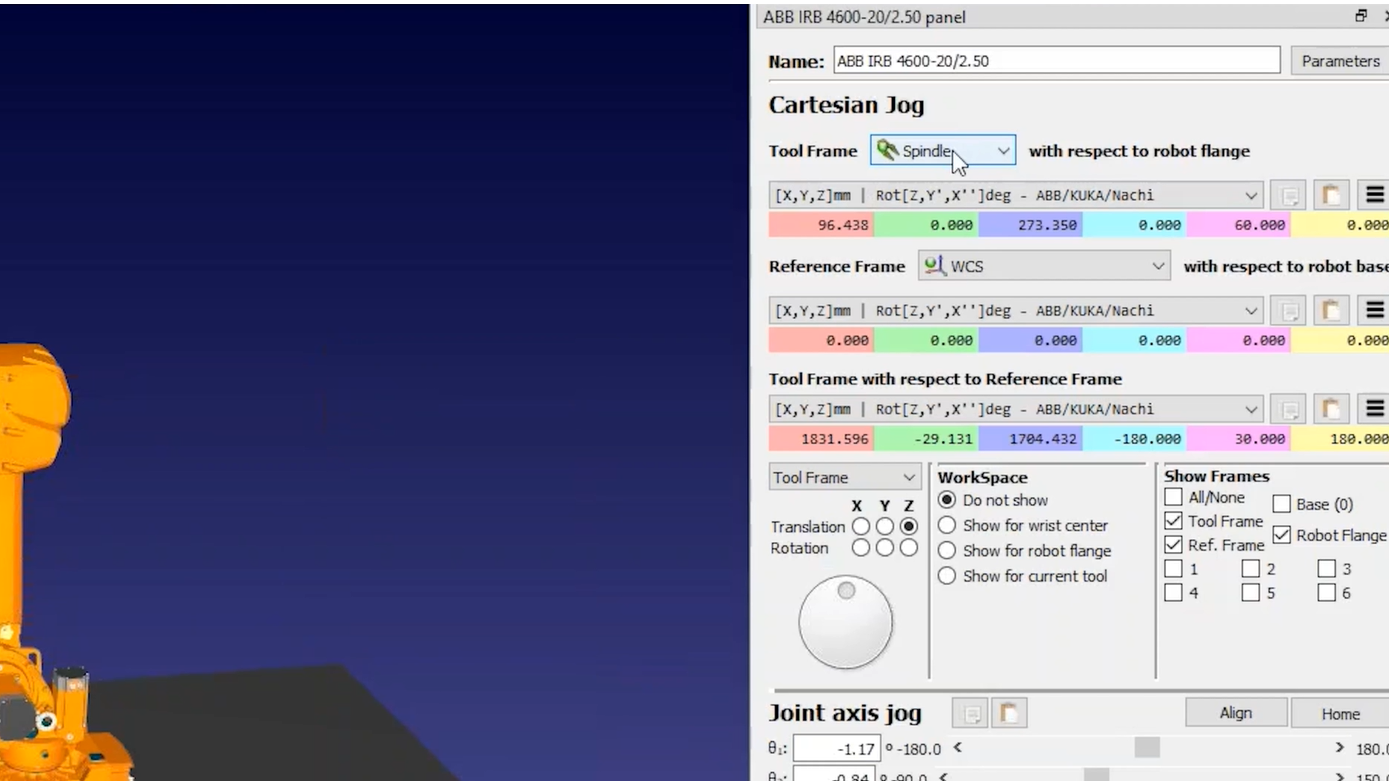
Folgen Sie diesen Schritten, um das Tool (TCP) richtig zu definieren:
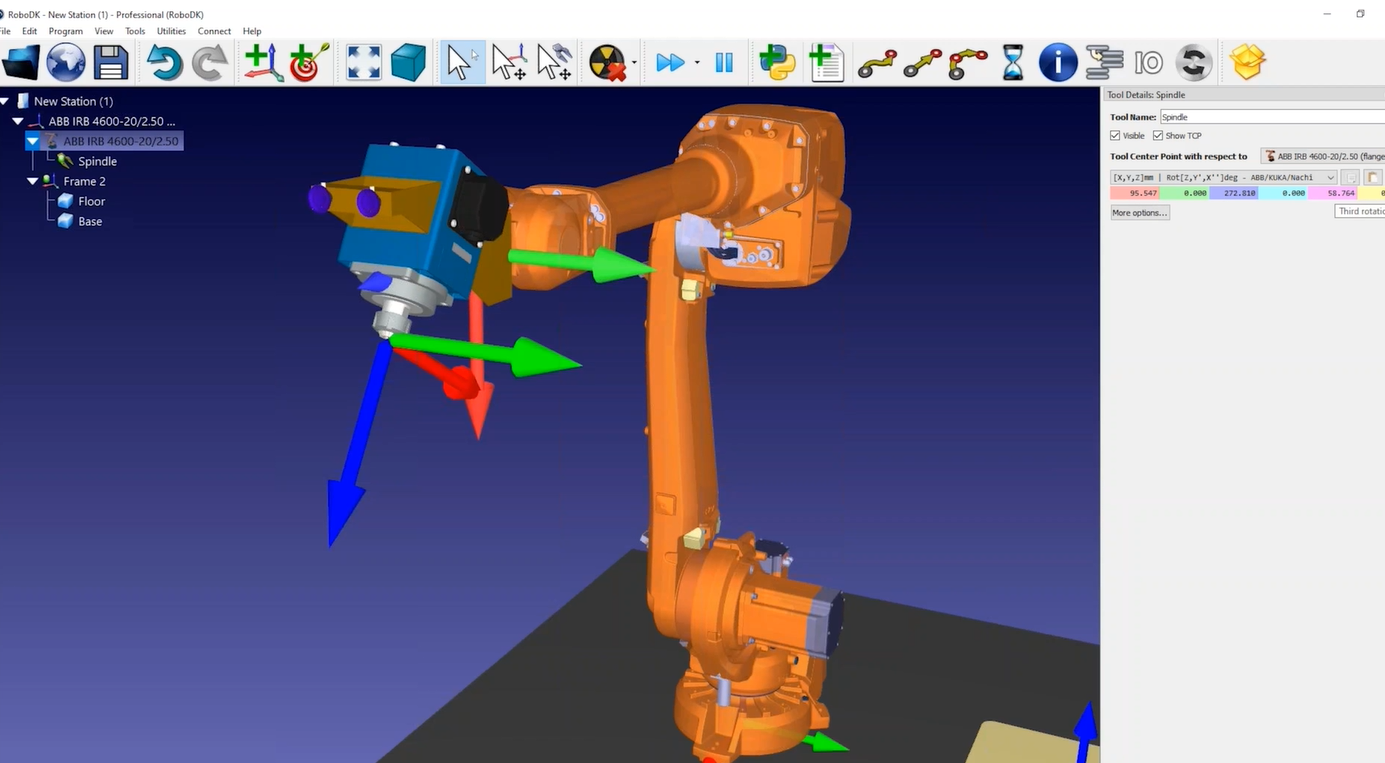
1.Sie können die Koordinaten des Werkzeugs eingeben, wenn Sie sie haben (Sie können zwischen verschiedenen herstellerspezifischen Ausrichtungsformaten wählen, um die Werkzeugposition einzugeben).
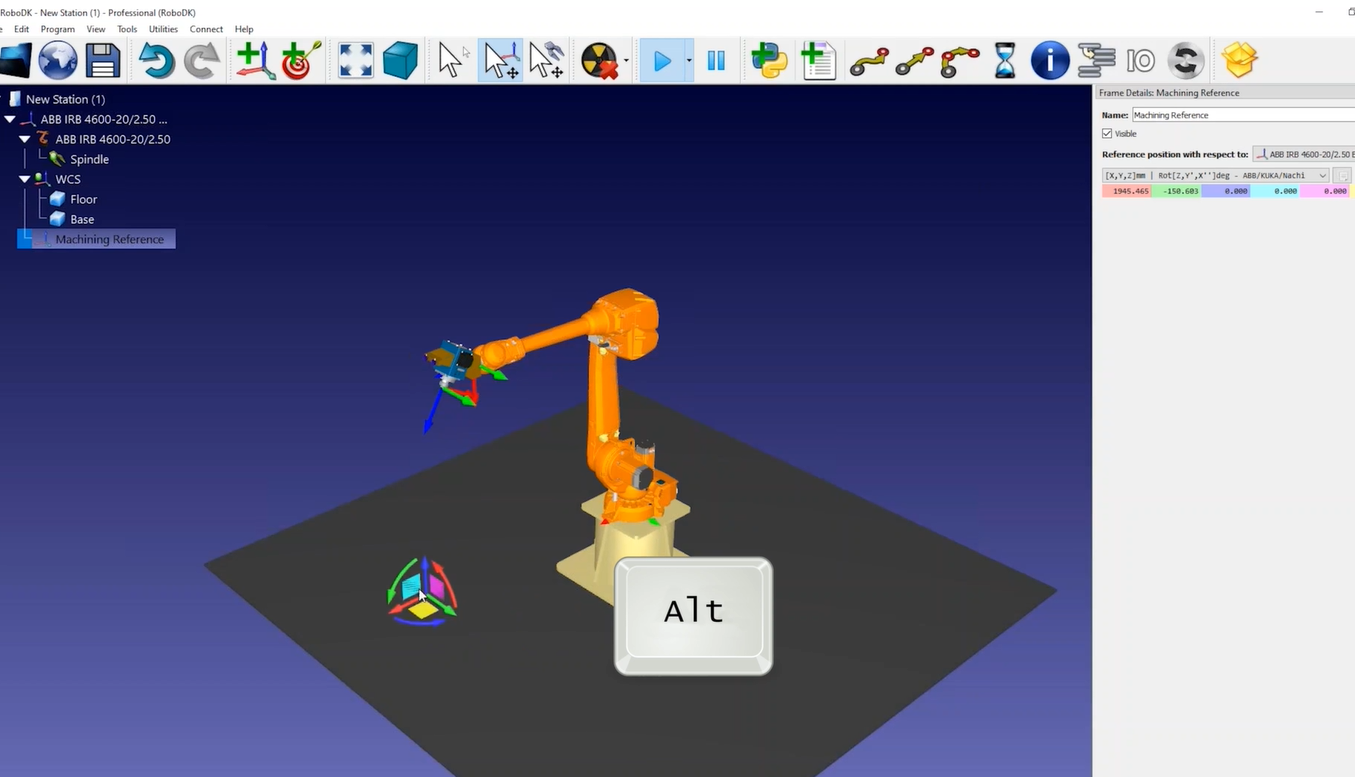
2.Wenn Sie die ALT-Taste gedrückt halten, können Sie den Roboter oder ein beliebiges Koordinatensystem bewegen.
3.Wenn Sie die Tasten ALT und Shift gedrückt halten, können Sie die Position und Ausrichtung Ihres TCP ändern.
Hinweis: Ähnlich können Sie mit Koordinatensystemen verfahren. Wenn Sie ein Koordinatensystem haben, das das Weltkoordinatensystem darstellt, können Sie darauf doppelklicken und die Koordinaten auf 0 setzen, oder Sie klicken einfach mit der rechten Maustaste und wählen Zurücksetzen.
Gehen Sie folgendermaßen vor, um ein weiteres Koordinatensystem hinzuzufügen, das die Bearbeitungsreferenz darstellt:
4.Wählen Sie das Menü Programm und dann Referenzrahmen hinzufügen.
5.Sie können Objekte in der Struktur umbenennen, indem Sie F2 drücken oder mit der rechten Maustaste klicken und Umbenennen wählen.
6.Wenn Sie die ALT-Taste gedrückt halten, können Sie das Koordinatensystem dorthin verschieben, wo Sie es haben möchten, wenn Sie die Möglichkeit haben, den Ort zu wählen, an dem Sie das Teil platzieren möchten
7.Sie können auf den Roboter doppelklicken, um zu sehen, welches Werkzeug und welches Koordinatensystem Sie verwenden. Für eine bestimmte Position des Roboters sollten die Werte, die Sie im Roboterbedienfeld sehen, mit den Werten übereinstimmen, die Sie in Ihrer Robotersteuerung sehen.
Folgen Sie diesen Schritten, um Ihre Roboterzelle zu speichern:
8.Sobald Sie Ihre Roboterzelle gebaut haben, können Sie sie als eine RDK-Datei speichern, indem Sie Datei➔ Station speichern wählen. Dadurch werden alle Einstellungen einschließlich der 3D-Modelle als eine Datei gespeichert.
9.Laden Sie die Bearbeitungsauftragsdatei in RoboDK und RoboDK sollte automatisch ein Roboterbearbeitungsprojekt für jede Bearbeitung erstellen.
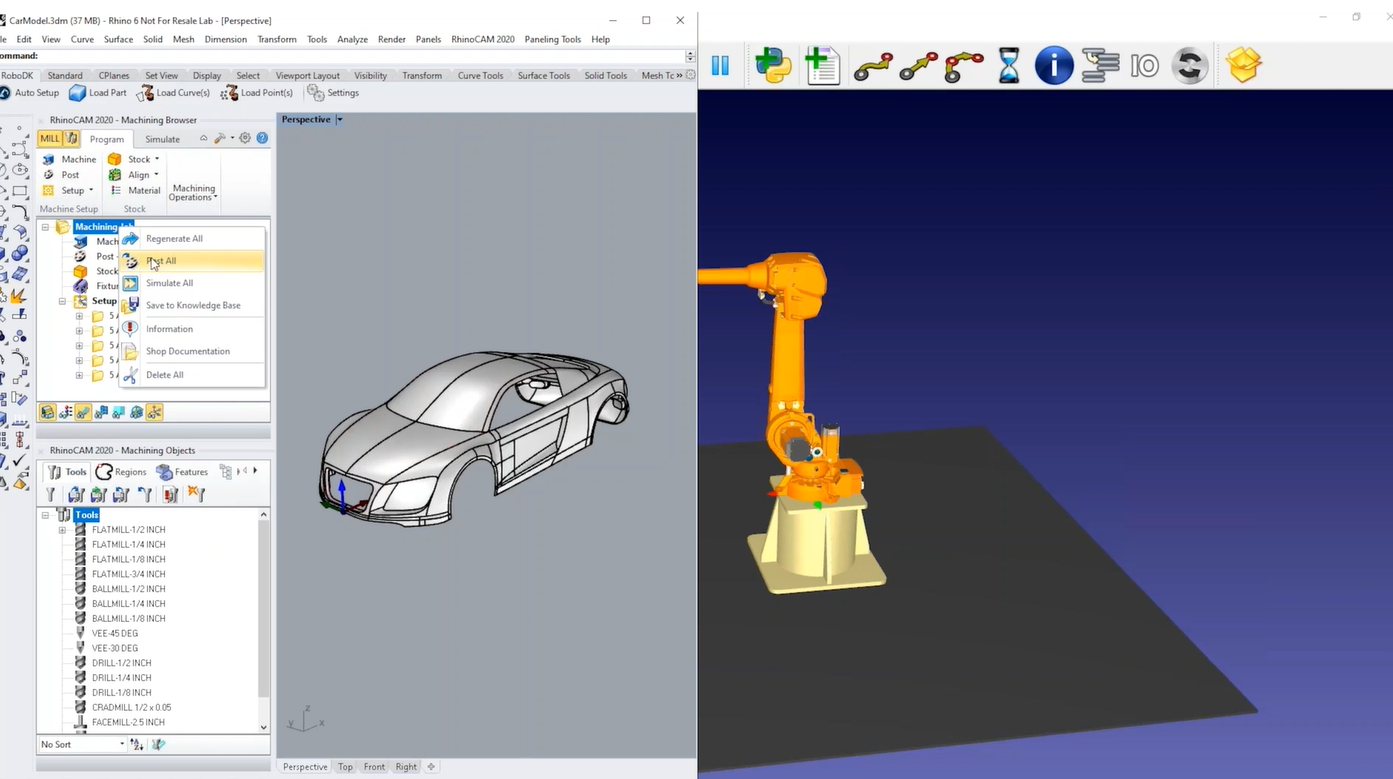
10.Sie können Aktualisieren wählen, um zu sehen, ob RoboDK mit den Standardeinstellungen einen praktikablen Pfad finden kann. Sie können auch alle Operationen im Ganzen aktualisieren.
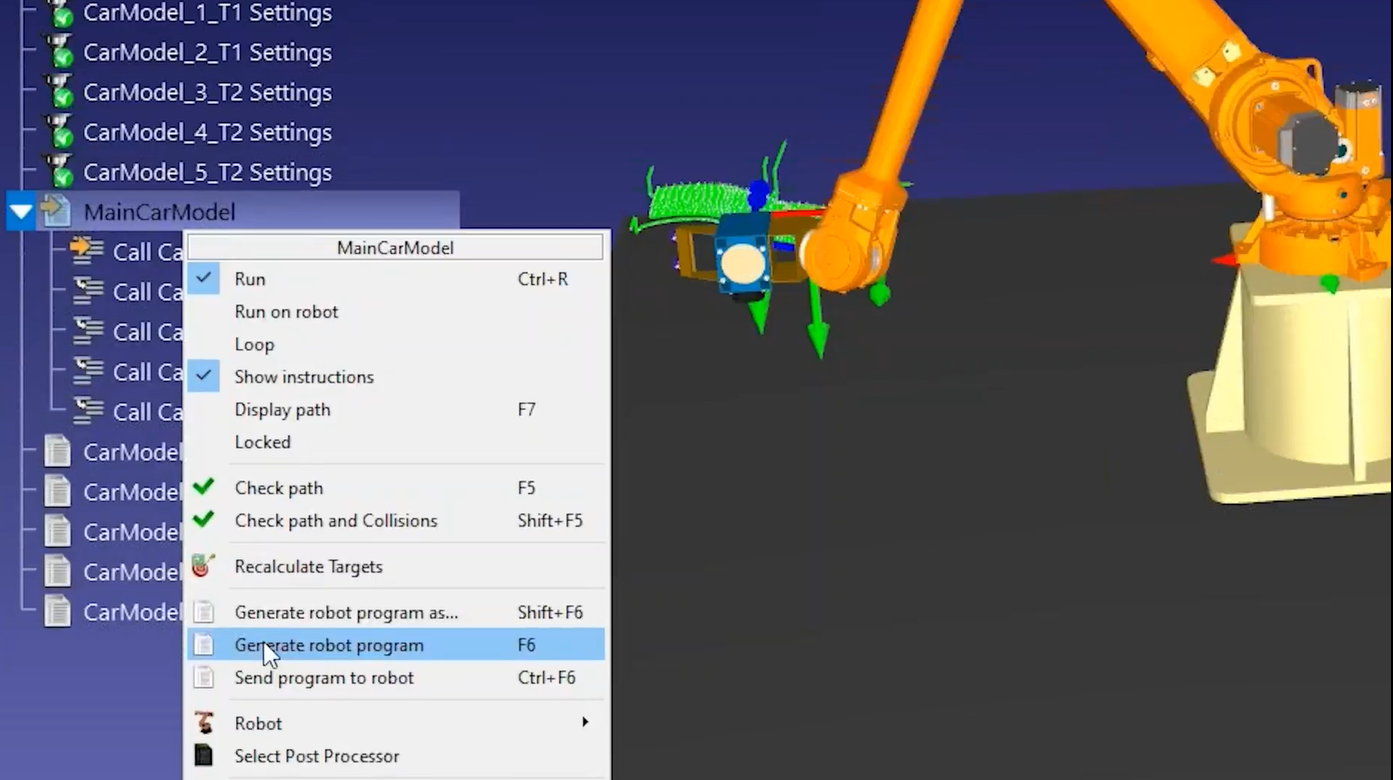
11.Sobald Sie eine gültige Simulation in RoboDK haben, können Sie mit der rechten Maustaste auf Ihr Programm klicken und Programm generieren wählen. Dadurch werden die für Ihre Robotersteuerung erforderlichen Dateien generiert.