Sichere Übergänge zwischen Roboter-Bearbeitungsaufträgen
Um den Übergang zwischen Ihren Roboter-Bearbeitungsaufträgen sicherer zu machen, können Sie den Roboter nach jedem in eine Anfahrposition fahren lassen.
Führen Sie diese Schritte aus, um ein neues Programm mit dem Namen GoHome zu erstellen und nach Abschluss eines Bearbeitungsauftrags zu diesem Ort zu wechseln:
1.Erstellen Sie ein neues Programm, indem Sie Programm➔ Programm hinzufügen wählen oder die entsprechende Schaltfläche in der Symbolleiste anklicken.
2.Benennen Sie das Programm durch Drücken von F2 in etwas wie GoHome um.
3.Wählen Sie das Programm, das Sie gerade erstellt haben.
4.Bewegen Sie den Roboter an eine sichere Stelle und wählen Sie Programm➔ Gelenk bewegen oder wählen Sie die entsprechende Schaltfläche in der Symbolleiste. Dieser Vorgang sollte ein neues Ziel an dieser Position erstellen und eine Anweisung zum Bewegen von Gelenken zu diesem Ziel hinzufügen, wenn das Programm zuvor ausgewählt wurde.
5.Sie können dann dafür sorgen, dass der Roboter zwischen den einzelnen Bearbeitungsvorgängen zu diesem Ausgangsziel fährt, indem Sie mit der rechten Maustaste auf die erste Programmaufrufanweisung klicken und Anweisung hinzufügen➔ Programmaufrufanweisung wählen.
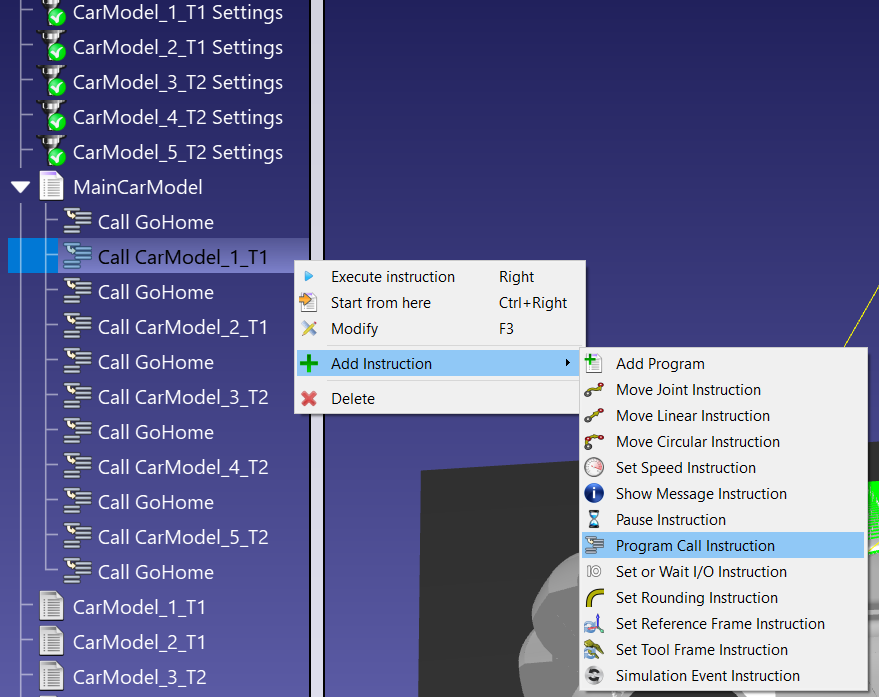
6.Geben Sie den Namen des Programms ein, zu dem Sie wechseln möchten (GoHome) und wählen Sie OK.
7.Sie können diese Anweisung dann in Ihr Programm kopieren/einfügen, um schnell das Endergebnis zu erhalten.
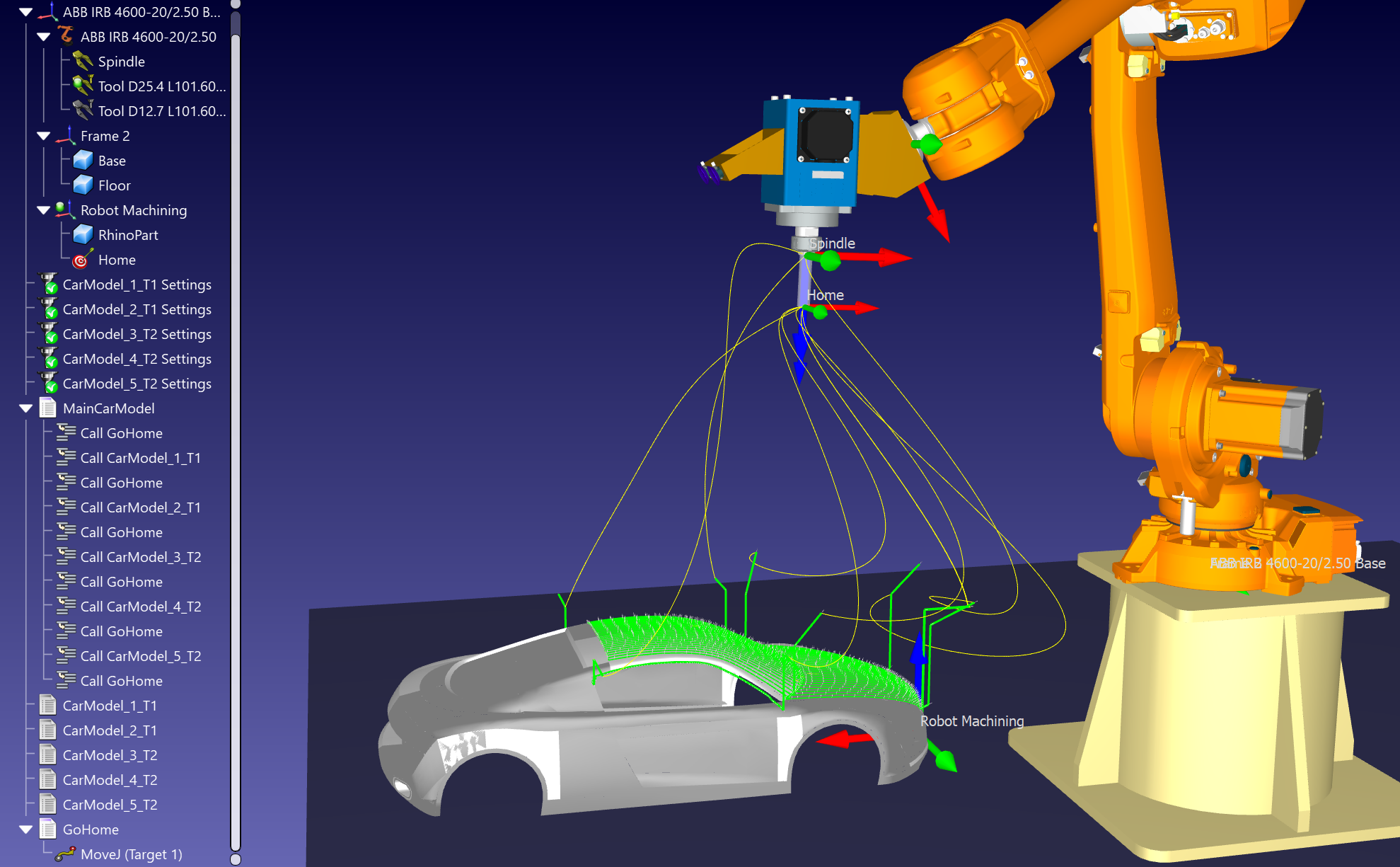
8.Klicken Sie mit der rechten Maustaste auf das Hauptprogramm und wählen Sie Pfad anzeigen, um den Roboter-Werkzeugweg als gelbe Linie zu sehen. So können Sie sehen, ob die Position Ihres Anfahrziels für Ihr Projekt geeignet ist.