Wählen Sie Ihren Roboter
Dieser Abschnitt zeigt, wie Sie eine neue Zelle erstellen können
Sie können diese Schritte befolgen, um eine neue Roboterzelle für die Roboterbearbeitung zu bauen.
1.Wählen Sie Datei➔ Neuer Sender.
2.Sie können auf die Bibliothek zugreifen, indem Sie Datei➔ Online-Bibliothek öffnen wählen.
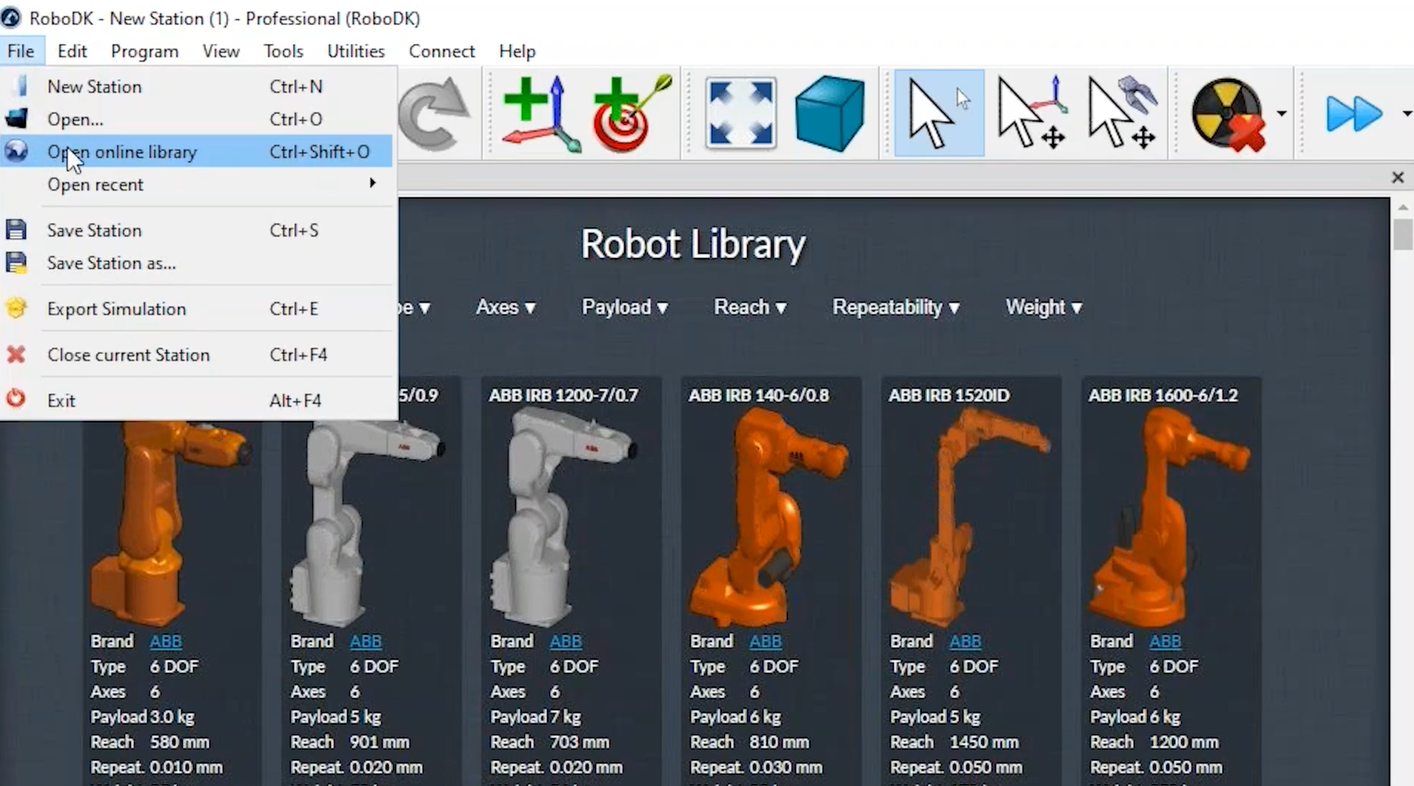
3.Sobald Sie Ihren Roboter gefunden haben, wählen Sie Download, um den Roboter in Ihrem Projekt zu öffnen.
Hinweis: Jeder Roboter wird mit seiner eigenen Roboterbasis als Koordinatensystem geladen.
Tipp: Sie können auch 3D-Modelle wie STEP-, IGES-, STL-Dateien und andere Formate laden. Um eine neue Datei zu öffnen, können Sie sie in RoboDK ziehen und ablegen oder wählen Sie Datei➔ Öffnen. Weitere Tipps zur Erstellung Ihres RoboDK-Projekts finden Sie im Abschnitt Erste Schritte.
Tipp: Sobald Sie ein Roboterbearbeitungsprojekt erstellt haben, können Sie einen Roboter ganz einfach ersetzen, indem Sie mit der rechten Maustaste auf den Roboter klicken und Roboter ersetzen wählen. Sie können dann einen Roboter auswählen, den Sie in Ihrer Bibliothek haben. Diese Methode ist einfacher, als die gesamte Zelle neu zu erstellen und die Verknüpfungen erneut herzustellen.