2D-Skizze aus SolidWorks
Öffnen Sie Ihr 3D-Objekt in SolidWorks. In diesem Beispiel handelt es sich bei dem 3D-Objekt um eine Ölwanne, auf der sich die Nut befindet, die gefüllt werden muss.
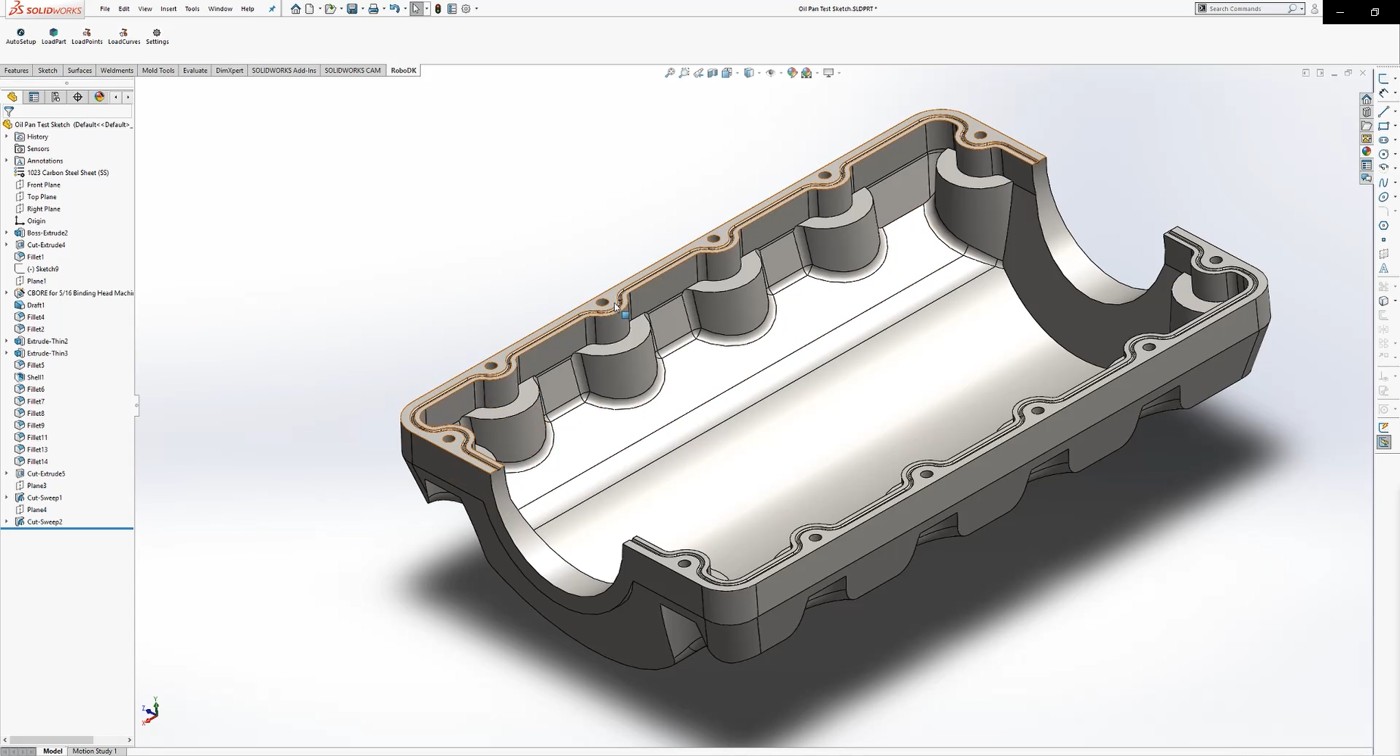
Das Ziel dieses Projekts ist es, die Dichtungsmasse in der Mitte der Rille auf der Höhe der Oberfläche zu verteilen, ohne die Dichtungsmasse auf eine Seite zu geben. Auf diese Weise kann die Dichtungsmasse reibungslos fließen.
Hier wird die 2D-Skizze verwendet. Sie müssen zunächst eine neue Skizze auf der flachen Oberfläche erstellen:
1.Wählen Sie die Registerkarte Skizze und klicken Sie auf die Schaltfläche Skizze, um eine neue zu erstellen.
2.Wählen Sie eine der Kanten Ihres 3D-Objekts
3.Klicken Sie mit der rechten Maustaste darauf und klicken Sie auf Tangentialität auswählen, um automatisch die gesamte Kante der Rille auszuwählen.
4.Wählen Sie die Schaltfläche Offset Entities, um die halbe Breite der Rille einzugeben. In diesem Fall ist der Wert 1,5 mm.
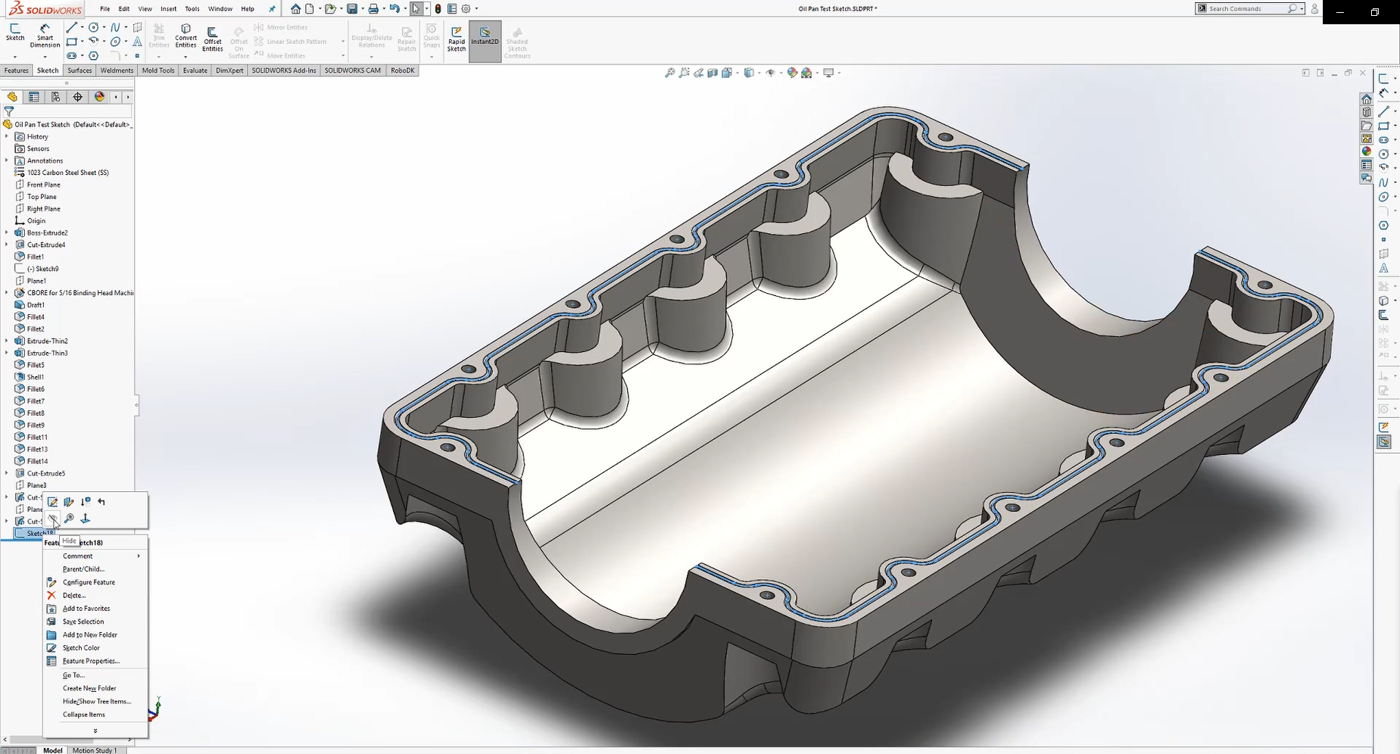
Damit haben Sie eine vollständige Werkzeugbahn für Ihren Roboter. Wiederholen Sie das Gleiche für die andere Seite der Ölwanne. Stellen Sie sicher, dass Ihre Skizze sichtbar ist, wie in der Abbildung unten gezeigt, damit Sie sie mit dem RoboDK-Plugin auswählen können.
Folgen Sie den nächsten Schritten, um Ihre Skizze in RoboDK zu laden:
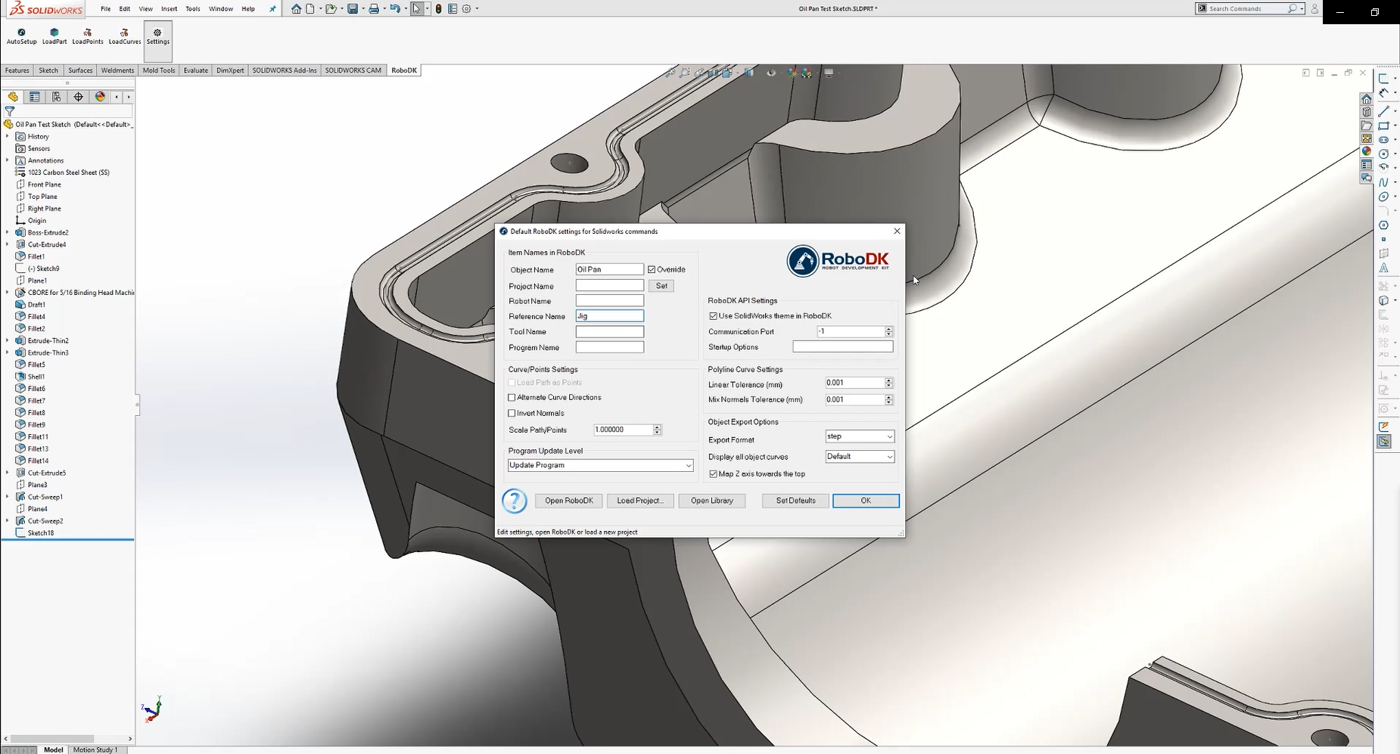
1.Wählen Sie die Registerkarte RoboDK und wählen Sie
2.Geben Sie den gewünschten Objektnamen in RoboDK ein. In diesem Beispiel ist es die Ölwanne.
3.Geben Sie den Referenznamen ein, unter dem er exportiert werden soll. In diesem Beispiel ist es Jig.
4.Schließen Sie das Fenster Einstellungen oder wählen Sie OK.
5.Wählen Sie in SolidWorks die Schaltfläche
6.Wählen Sie alle Linien und Oberseiten Ihrer Skizze aus und drücken Sie OK.
7.Wählen Sie
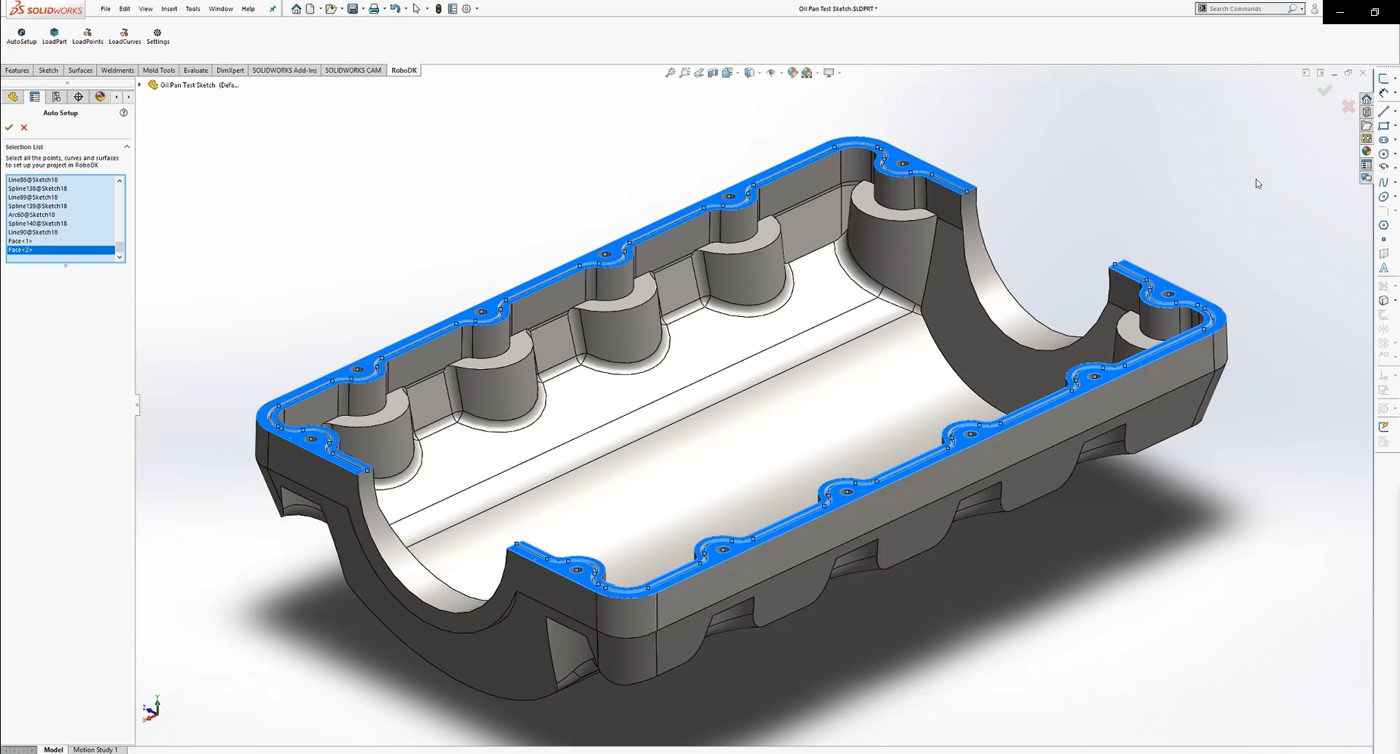
Sie sollten sehen, dass das Teil auf den aktiven Referenzrahmen (Jig) geladen ist und ein neues Kurvenverfolgungsprojekt in RoboDK dem Werkzeugweg folgt.