RoboDK Station
Im nächsten Schritt überprüfen Sie, ob die Reihenfolge, in der die Pfadabschnitte ausgeführt werden, korrekt ist, indem Sie
Wenn Sie die Reihenfolge oder den Sinn eines Pfadabschnitts ändern möchten, gehen Sie folgendermaßen vor:
1.Korrigieren Sie die Reihenfolge der Pfadabschnitte, indem Sie auf
2.Klicken Sie mit der rechten Maustaste auf einen leeren Bereich des Senders und Auswahl zurücksetzen
3.Gehen Sie zum Startpunkt Ihres Pfades und wählen Sie den ersten Abschnitt aus. Vergewissern Sie sich, dass er in die richtige Richtung zeigt, indem Sie mit der rechten Maustaste darauf klicken, und drücken Sie bei Bedarf auf Richtung wechseln.
4.Wählen Sie Nächste Kurve automatisch auswählen oder Alles automatisch auswählen, um automatisch jeden Abschnitt des Pfades in der richtigen Reihenfolge auszuwählen.
5.Wählen Sie Erledigt. Damit kehren Sie zum RoboDK-Einstellungsfenster zurück.
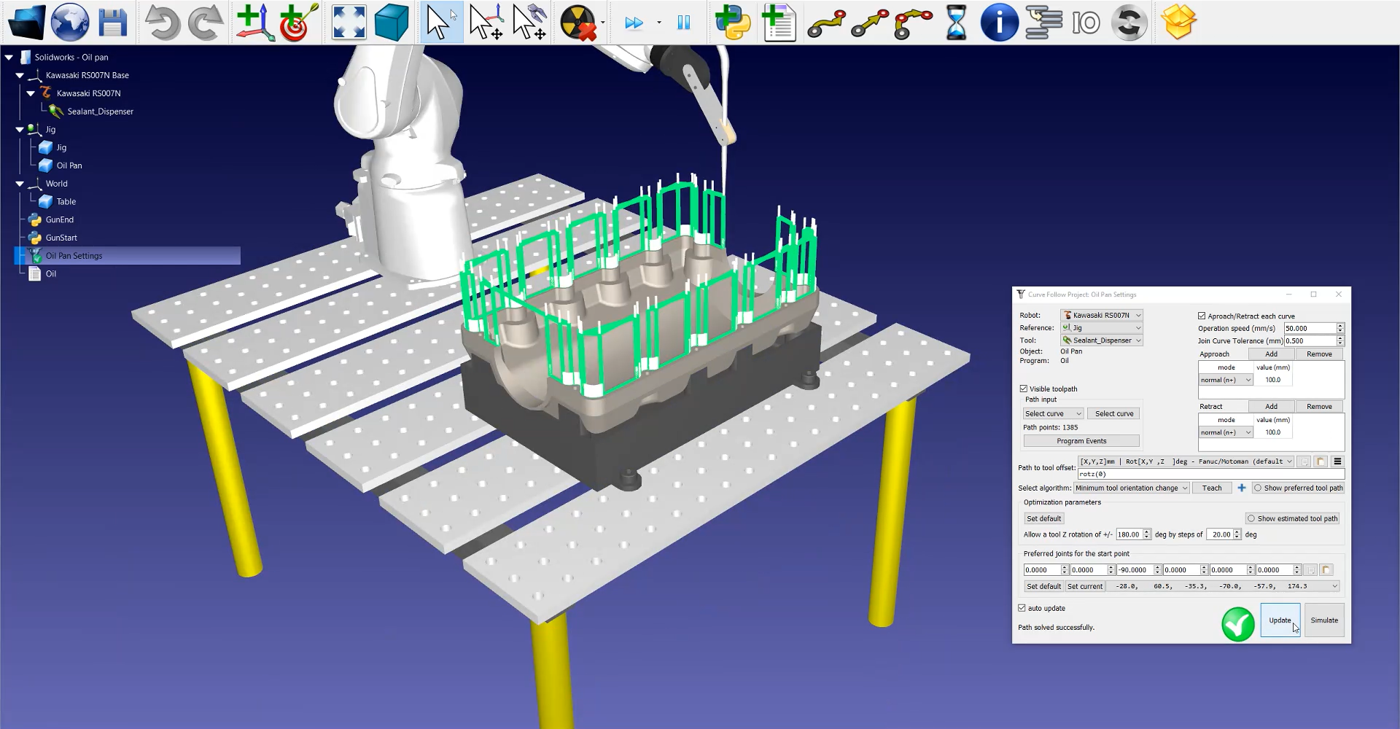
Als nächstes müssen Sie die Ausrichtung des Werkzeugs anpassen:
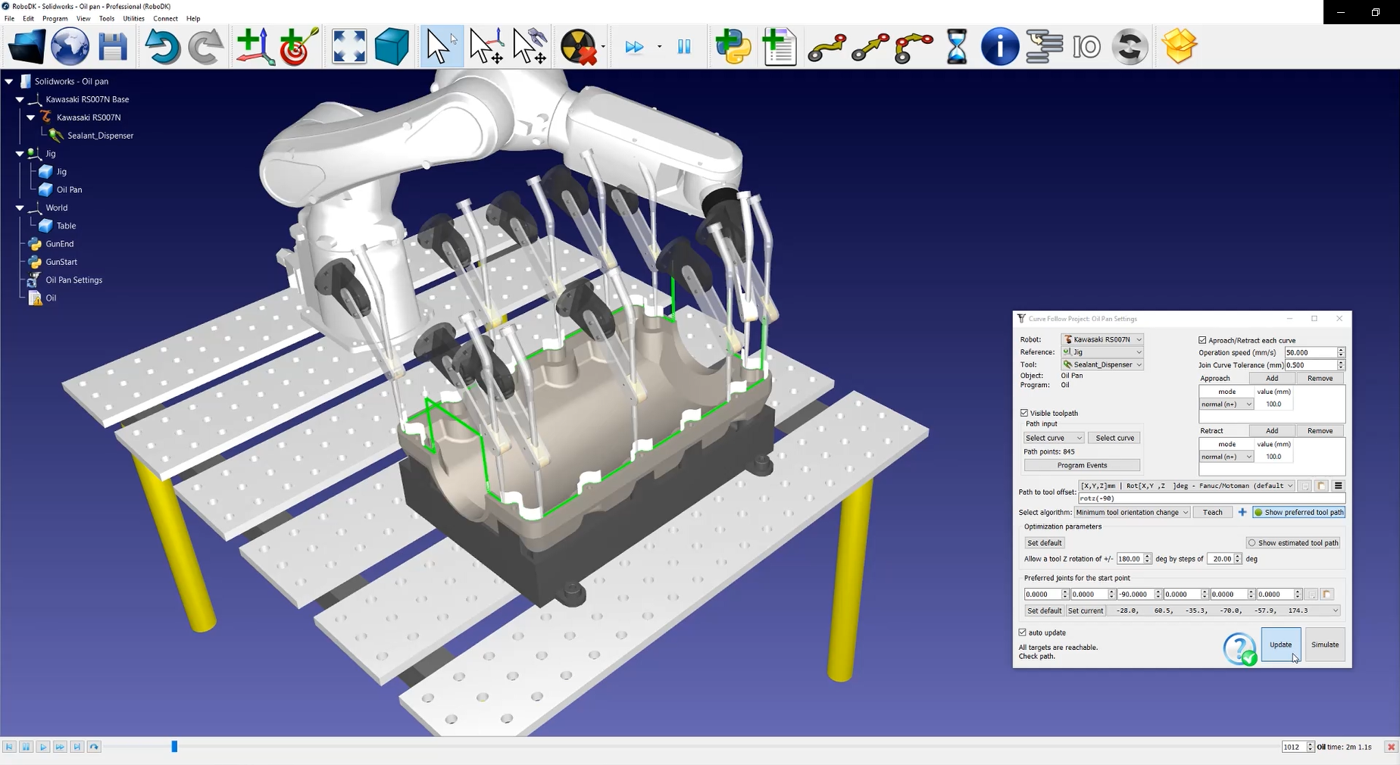
1.Wählen Sie Bevorzugten Werkzeugpfad anzeigen, um das Werkzeug entlang des Pfades zu visualisieren, wie in der Abbildung unten gezeigt.
2.Ändern Sie den Wert rotz. In diesem Beispiel ist -90 Grad eingestellt.
3.Wählen Sie Aktualisieren➔ Simulieren.
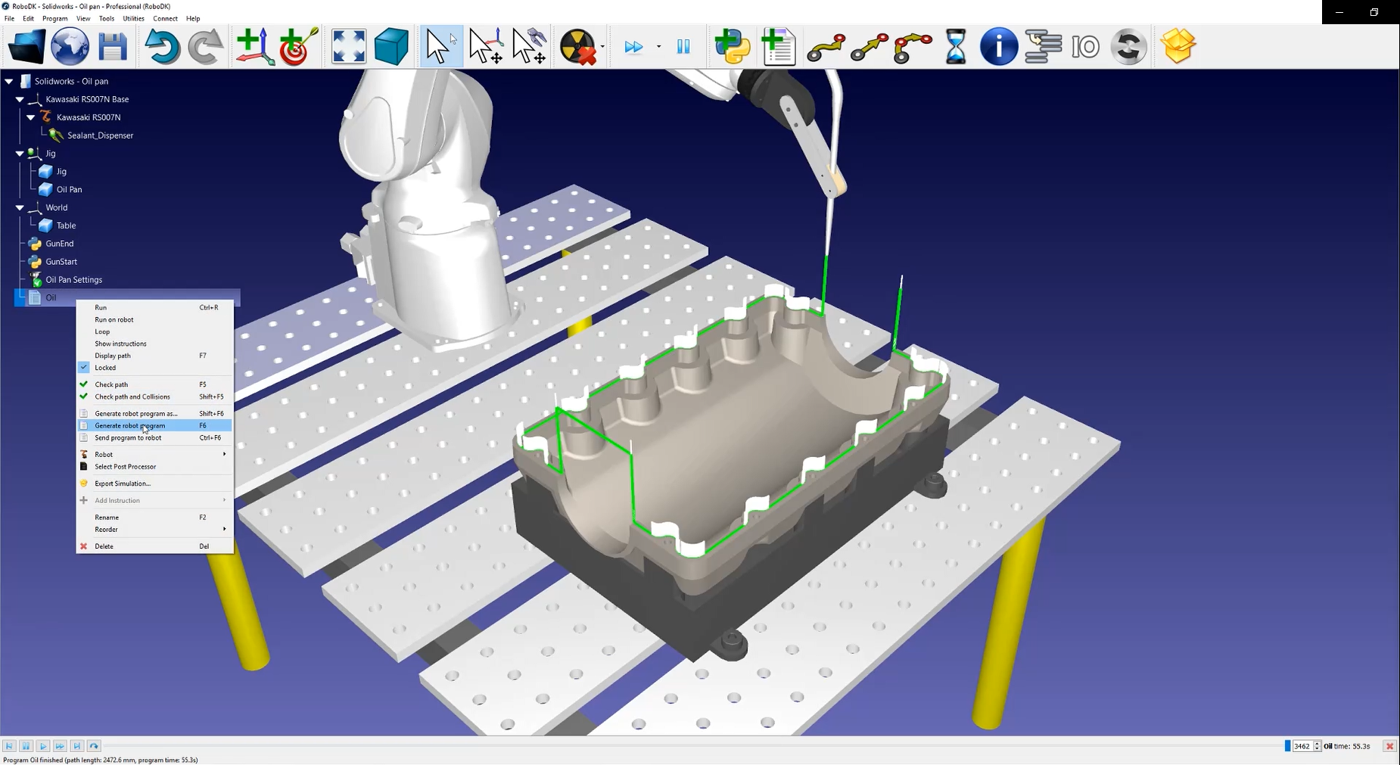
Um Ihr Roboterprogramm zu erstellen, klicken Sie mit der rechten Maustaste auf
Die .pg-Datei ist nun bereit, auf Ihre Robotersteuerung übertragen zu werden.