Methode 1: Merkmalsextraktion
Öffnen Sie Ihr 3D-Objekt in Fusion 360. In diesem Beispiel ist das 3D-Objekt ein gestanztes Stück Metall
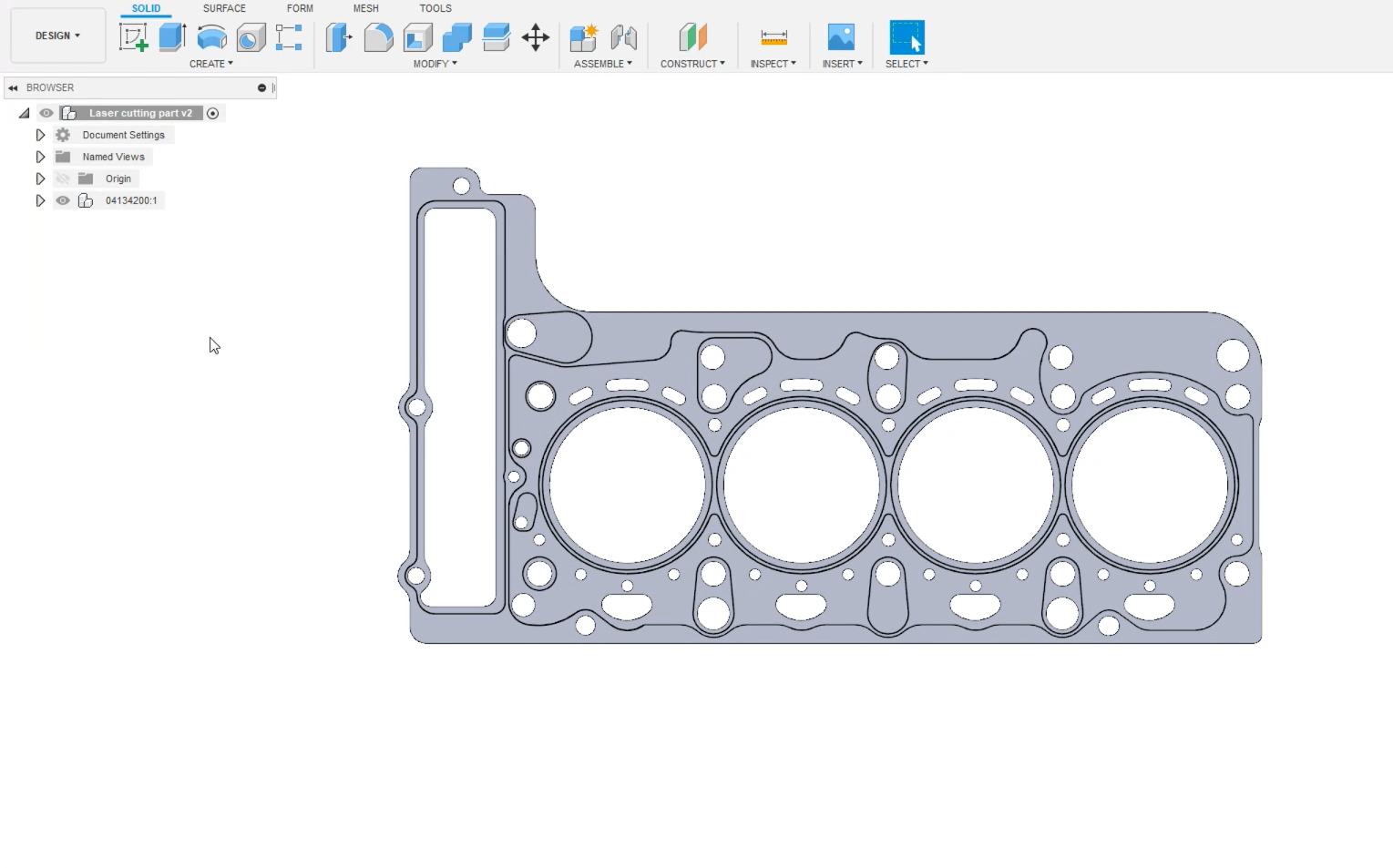
Das Ziel dieses Projekts ist es, automatisch ein Roboterprogramm zu erstellen, das all diese Löcher mit einem Leaserschneider schneidet. Das Programmieren per Hand würde zu lange dauern.
1.Wählen Sie in Fusion in der oberen linken Ecke den Bereich Design.
2.Wählen Sie die Registerkarte Tools. Hier finden Sie das RoboDK-Plugin.
3.Klicken Sie auf die Schaltfläche
Das Teil wurde in den aktiven Referenzrahmen Ihrer RoboDK Station importiert. Vergewissern Sie sich, dass das Teil in der richtigen Ausrichtung importiert wurde. In diesem Beispiel müssen Sie die Ausrichtung des Teils ändern.
Hinweis: Die Ausrichtung Ihres Teils wird durch die Ausrichtung definiert, in der das Teil in Fusion 360 entworfen wurde.
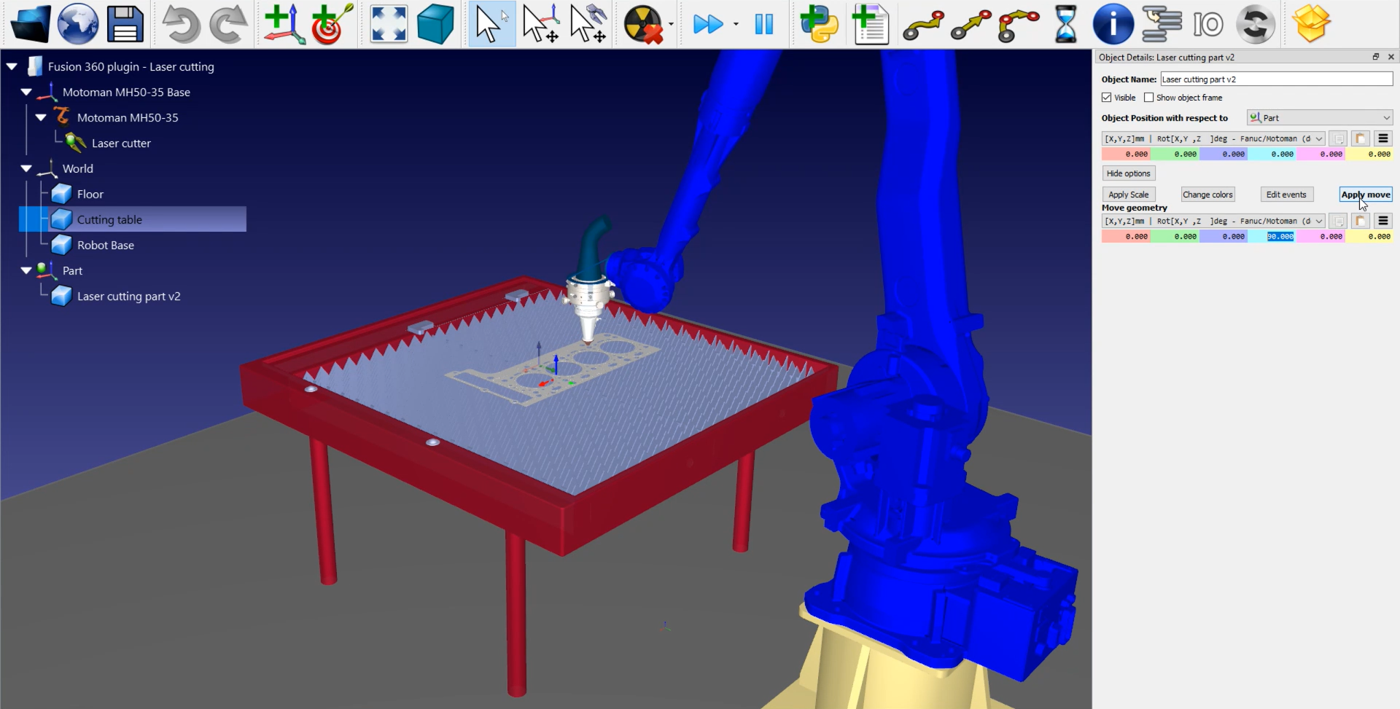
Folgen Sie den nächsten Schritten, um die Ausrichtung Ihres Teils zu ändern:
1.Doppelklicken Sie auf das
2.Klicken Sie im geöffneten Menü auf Mehr Optionen.
3.Gehen Sie zu Geometrie verschieben und geben Sie in der X-Achse (hellblau) 90 ein, wie in der Abbildung oben gezeigt.
4.Klicken Sie auf Verschieben anwenden, um die Ausrichtung zu speichern.
Das RoboDK-Plugin verfügt über eine weitere Funktion in Fusion 360, mit der Sie Ihren Schneidepfad in RoboDK importieren können.
1.Gehen Sie zurück zu Fusion 360.
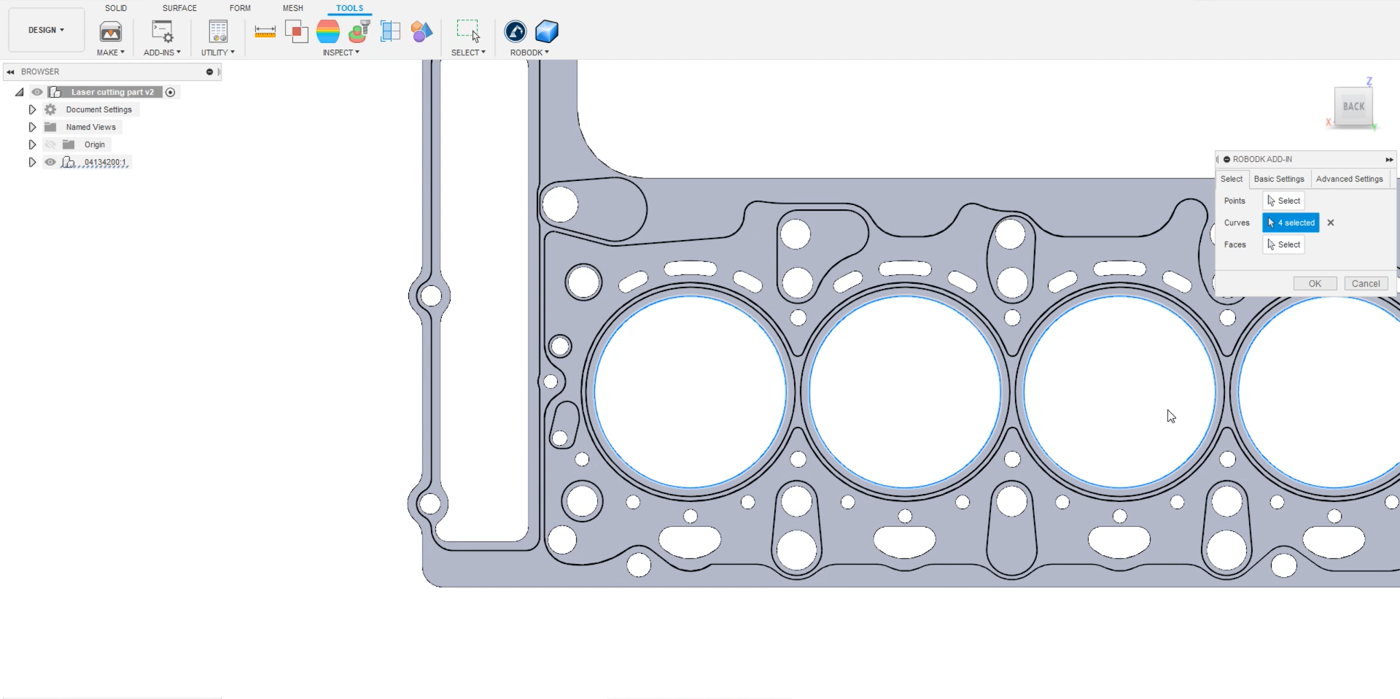
2.Wählen Sie im RoboDK-Plugin-Menü die Option Kurve(n) laden.
3.Wählen Sie Kurven im geöffneten Menü.
4.Wählen Sie die Kanten der vier großen Kreise aus, wie in der Abbildung unten gezeigt.
Jetzt müssen Sie RoboDK eine Orientierung für das Roboterwerkzeug geben.
1.Wählen Sie im geöffneten Menü Gesichter.
2.Wählen Sie die Flächen aus, auf die das Werkzeug normal angewendet werden soll, wie in der Abbildung unten gezeigt.
Jetzt können Sie die Einstellungen konfigurieren:
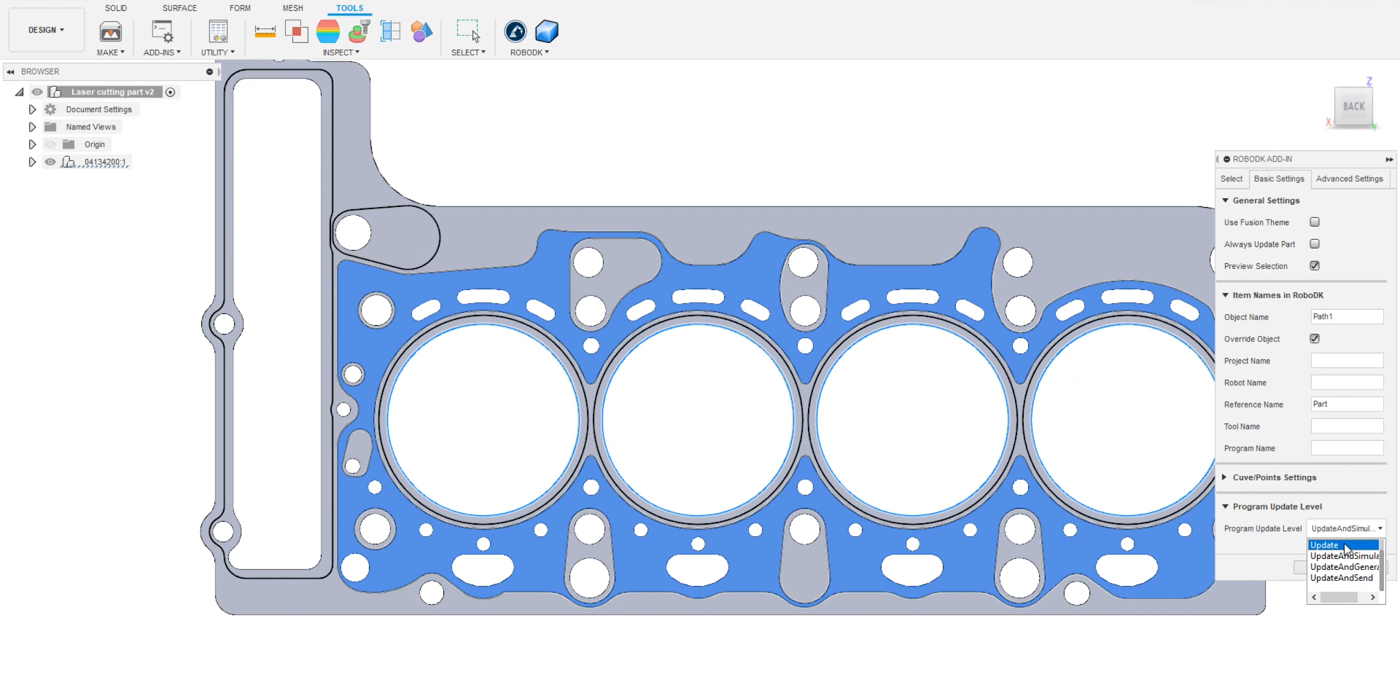
1.Gehen Sie im gleichen Menü auf Grundeinstellungen.
2.Deaktivieren Sie das Kontrollkästchen Fusion-Thema verwenden, wenn Sie RoboDK in seinem Standardverhalten belassen möchten.
3.Geben Sie einen Objektnamen ein, um Ihren Pfad zu benennen. In diesem Beispiel wird es Pfad 1 sein.
4.Geben Sie einen Referenznamen ein, unter dem die Datei exportiert werden soll. In diesem Beispiel heißt es Part, genau wie in der RoboDK Station.
5.Wählen Sie Aktualisieren in der Programmaktualisierungsebene, um anschließend mehr Optionen zu haben, wie in der Abbildung oben gezeigt. Dies ist optional.
6.Klicken Sie auf OK.
Hinweis: Auf der Registerkarte Erweiterte Einstellungen finden Sie die Lineare Toleranz, die die Anzahl der Punkte steuert, die Sie an RoboDK senden. Je kleiner die Zahl ist, desto höher ist die Anzahl der Punkte und damit die Präzision des Pfades.
Sie sollten nun den importierten Pfad in RoboDK sehen können. In diesem Beispiel ist die Ausrichtung wieder falsch und Sie müssen die Ausrichtung ändern, wie Sie es bereits bei dem Teil getan haben.
1.Doppelklicken Sie auf Ihren Pfad, in diesem Beispiel ist es
2.Klicken Sie im geöffneten Menü auf Weitere Optionen.
3.Gehen Sie zu Geometrie verschieben und geben Sie in der X-Achse (hellblau) 90 ein.
4.Klicken Sie auf Verschieben anwenden, um die Ausrichtung zu speichern.
Im nächsten Schritt überprüfen Sie, ob die Reihenfolge, in der die Pfadabschnitte ausgeführt werden, korrekt ist, indem Sie
1.Doppelklicken Sie auf Ihre Pfadeinstellungen, hier
2.Stellen Sie sicher, dass der Roboter, die Referenz und das Werkzeug die richtigen sind.
3.Klicken Sie auf Kurve auswählen.
4.Wählen Sie die anderen Kreise aus.
5.Klicken Sie auf
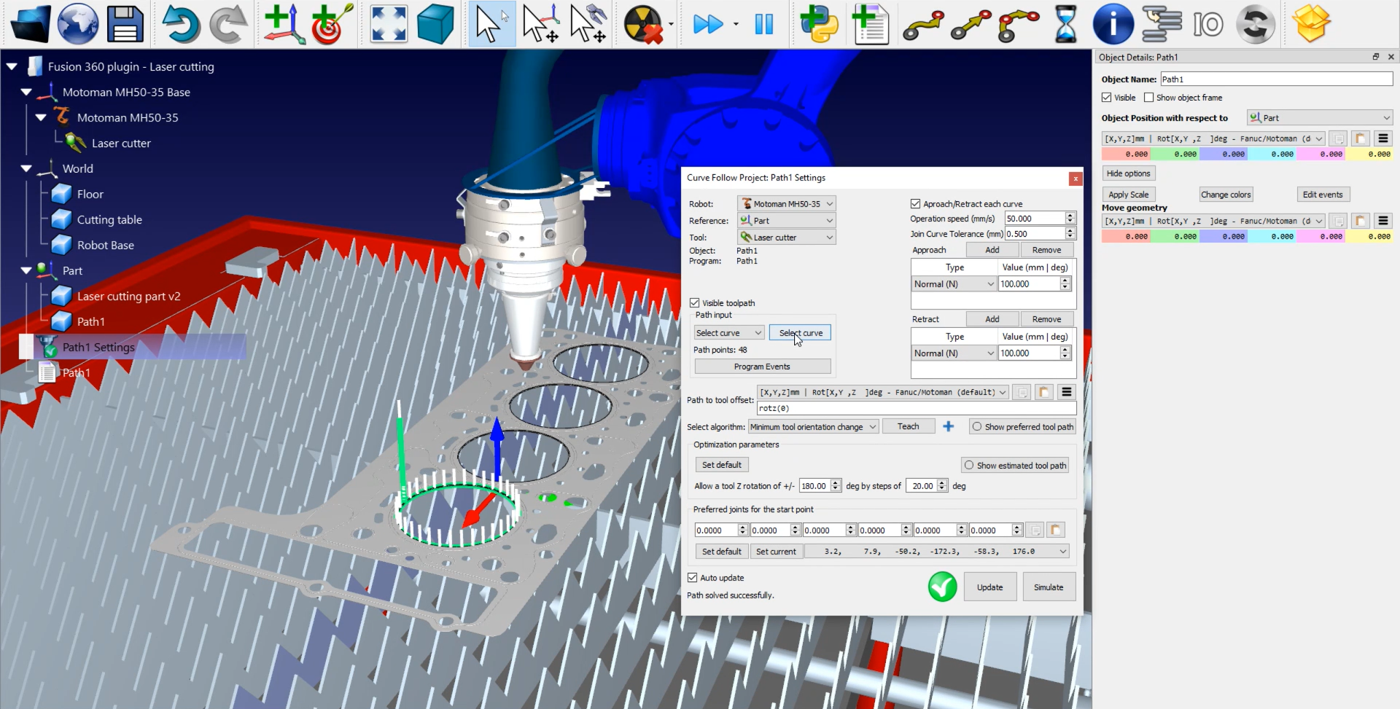
Hinweis: Sie können die Richtung des Pfades ändern, indem Sie mit der rechten Maustaste darauf klicken und Sinn ändern wählen.
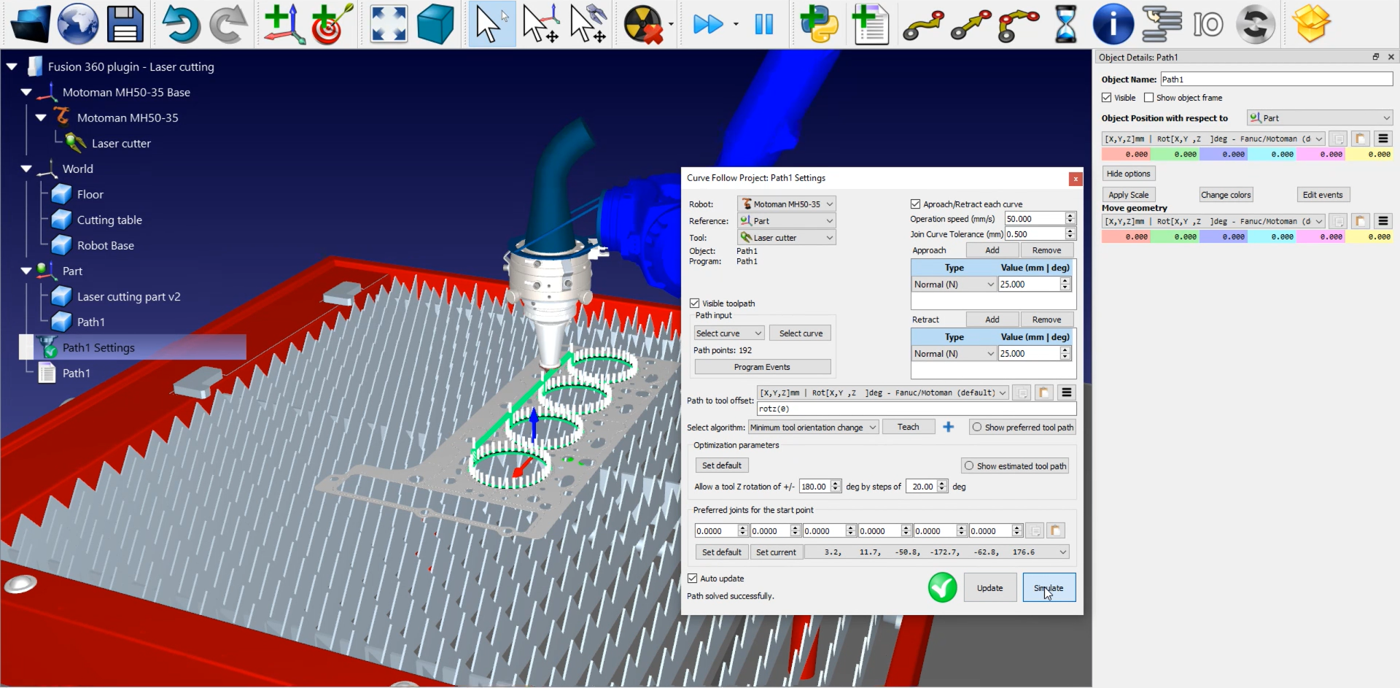
Sie können nun feststellen, dass die Annäherungs- und Rückzugsbewegungen etwas zu lang sind.
Sie können diese Werte leicht ändern, indem Sie:
1.Doppelklicken Sie auf Ihre Pfadeinstellungen, hier
2.Geben Sie einen kleineren Wert in die Felder Annäherung und Einfahren ein. In diesem Beispiel können Sie 25 mm eingeben.
3.Klicken Sie auf Aktualisieren➔ Simulieren.
Der nächste Schritt besteht darin, den Radius des Lasers zu berücksichtigen. In diesem Beispiel schneidet der Laser zu viel Material.
Wie Sie Ihren Laserradius einrichten:
1.Gehen Sie zurück zu Fusion 360.
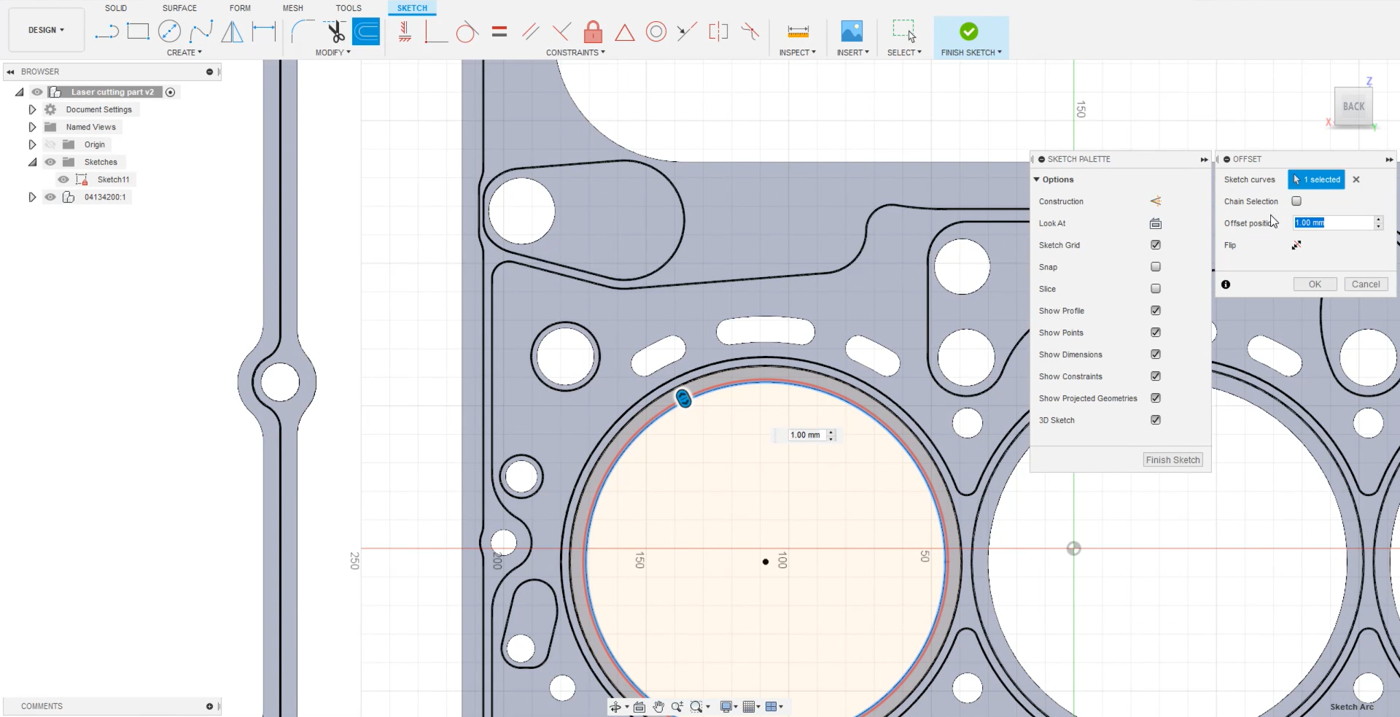
2.Gehen Sie auf die Registerkarte Solid➔ Skizze erstellen, um Ihre Skizze zu erstellen.
3.Wählen Sie einen Kreis aus und klicken Sie im oberen Menü auf Offset, um einen neuen Pfad zu erstellen.
4.Wenn der Durchmesser des Laserstrahls 2 mm beträgt, ist der Radius 1 mm. Geben Sie 1 in das Feld Offsetposition ein, wie in der Abbildung unten gezeigt.
5.Wiederholen Sie diese Schritte für die 3 anderen Kreise.
6.Klicken Sie auf Ok.
Sie können nun die Kurven in RoboDK laden.
1.Gehen Sie auf die Registerkarte Tools.
2.Klicken Sie auf RoboDK➔ Lastkurve(n).
3.Wählen Sie Kurven und klicken Sie auf die Skizze in jedem Kreis.
4.Wählen Sie Gesichter und klicken Sie auf das Gesicht, das Sie mit dem Werkzeug normal darstellen möchten.
5.In diesem Beispiel lautet der Objektname (Grundeinstellungen) Pfad2.
6.Klicken Sie auf Ok, um den Pfad in RoboDK zu importieren.
Sie können die Ausrichtung von Pfad2 wie oben beschrieben ändern. Wenn Sie näher kommen, können Sie den Unterschied zwischen den beiden Pfaden sehen. Sie können nun den Pfad1 löschen.
Im nächsten Schritt überprüfen Sie, ob die geladenen Pfadabschnitte korrekt sind:
1.Wählen Sie
2.Klicken Sie auf Kurve auswählen und wählen Sie die anderen Kreise aus, wie in der Abbildung unten gezeigt.
3.Wählen Sie
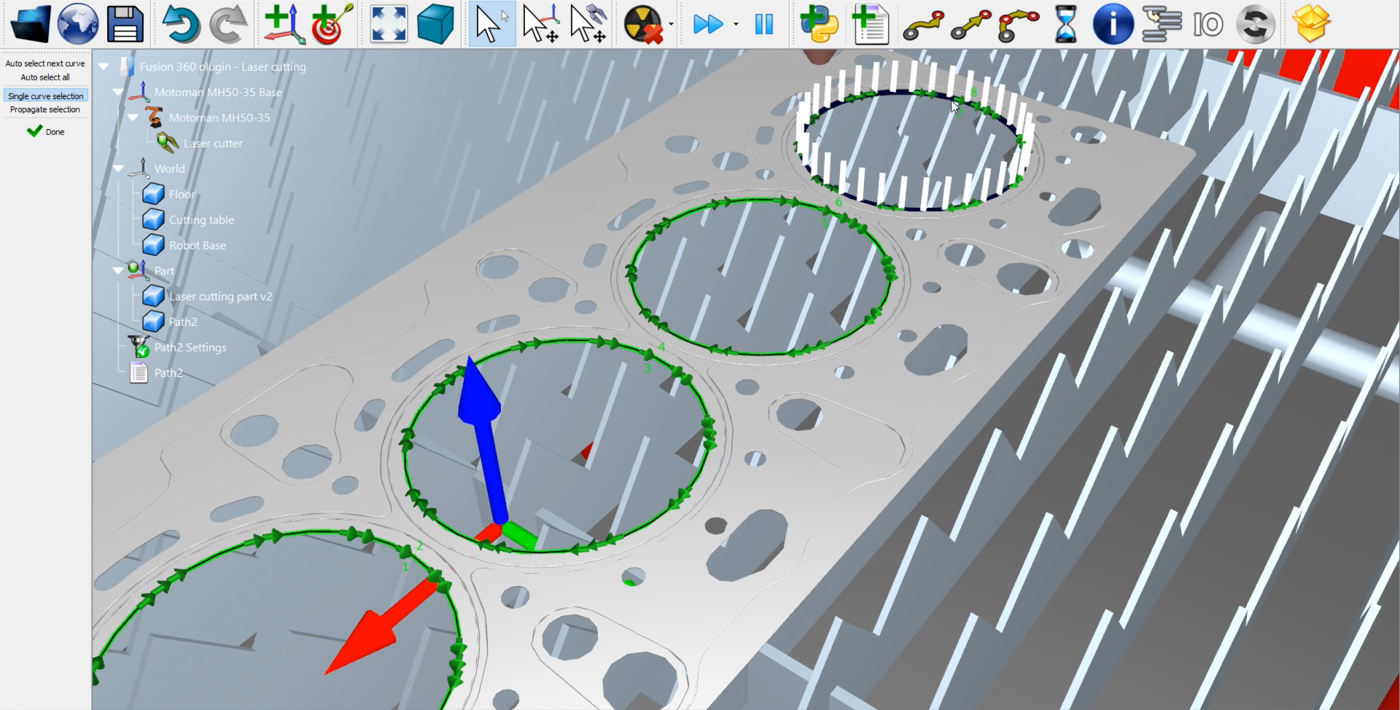
Sie können die Größe der Annäherungs- und Rückzugsbewegungen wie oben beschrieben verringern. In diesem Beispiel können Sie wieder 25 mm eingeben. Vergessen Sie nicht,➔ Simulieren Sie Ihr Kurvenfolgeprojekt zu aktualisieren, um Ihre Einstellungen zu speichern. Sie können die gleichen Schritte für alle anderen Löcher dieses Teils durchführen.
Diese Art der Erstellung eines Laserschneidprogramms funktioniert für das Fusion 360-Plugin von RoboDK, aber auch für alle anderen CAD-Plugins.