Auswählen und platzieren mit der API
Wenn Sie fortgeschrittenere Pick-and-Place-Vorgänge benötigen, wie z.B. das Aufnehmen großer Baugruppen oder das Aufnehmen von Objekten von einem sich bewegenden Förderband, können Sie die API zur Programmierung Ihrer Pick-and-Place-Anwendungen verwenden.
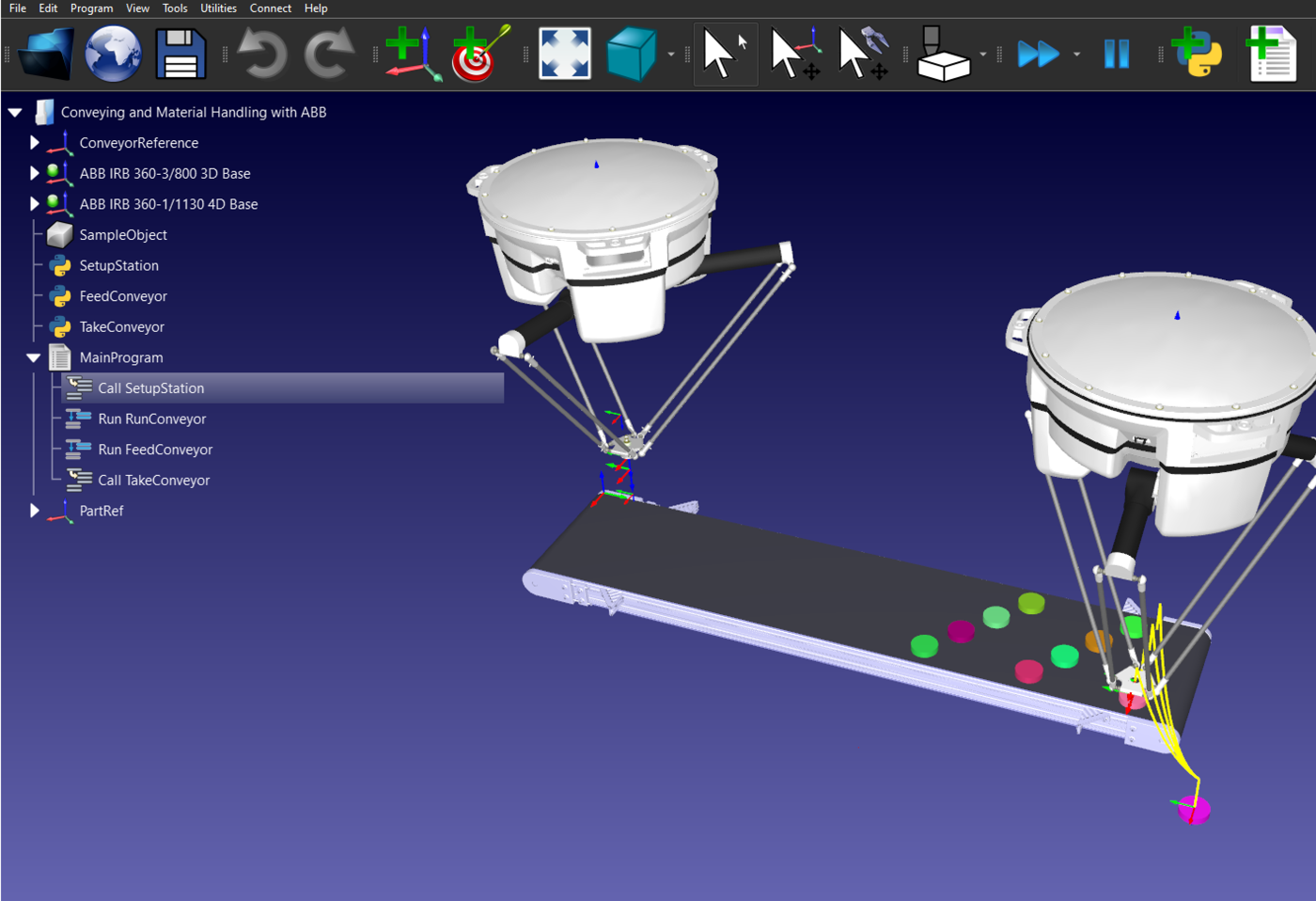
Dieses Beispiel verwendet die RoboDK API mit Python, um Objekte auf einem sich bewegenden Förderband aufzunehmen und zu platzieren. Sie können es aus unserer Bibliothek herunterladen.
Tipp: Weitere Informationen über die RoboDK API hierfinden Sie .
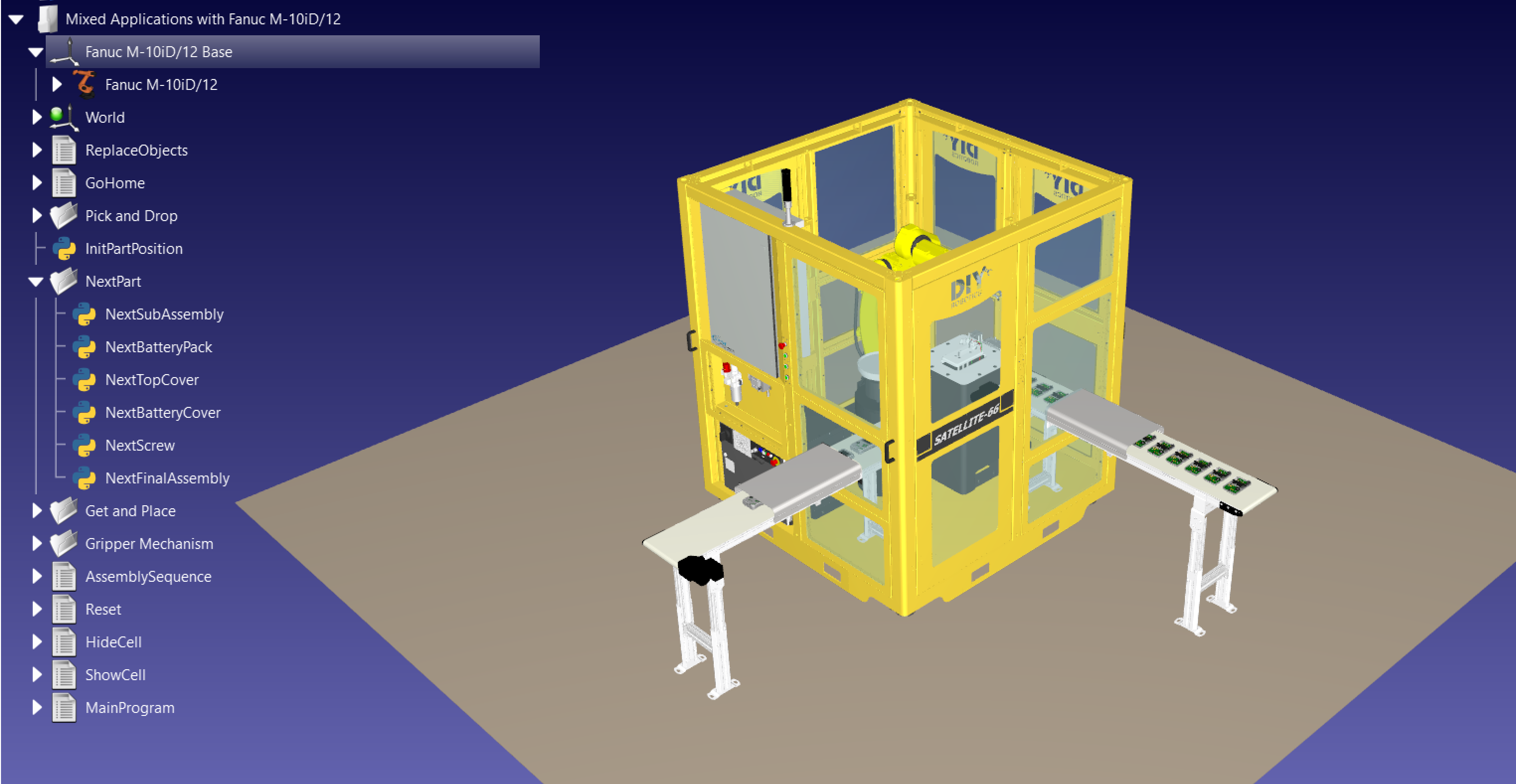
Werfen Sie auch einen Blick auf diese Montagestation, die mehrere Teile verwendet, um eine endgültige Baugruppe zu erstellen, wobei viele Pick-and-Place-Operationen verwendet werden: Gemischte Anwendungen mit Fanuc M-10iD/12.