Einfaches Beispiel für Pick and Place
Dieser Abschnitt zeigt ein einfaches Beispiel für ein Pick-and-Place-Verfahren, bei dem ein Roboterarm mit einem Vakuumgreifer eine Kiste bewegt.
Befolgen Sie diese Schritte, um Ihr Beispiel für die Auswahl und Platzierung zu erstellen:
Erstellen Sie ein neues RoboDK Projekt
Diese Schritte zeigen Ihnen, wie Sie in RoboDK ein neues Projekt (auch als Station bezeichnet) für eine Pick-and-Place-Anwendung erstellen.
1.RoboDK öffnen: Starten Sie die RoboDK-Anwendung auf Ihrem Computer.
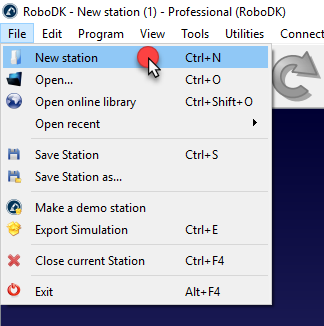
2.Erstellen Sie eine neue Station: Wählen Sie im Hauptmenü von RoboDK den Befehl Datei - Neue Station - Eine neue, leere Station wird als Ihr Arbeitsbereich erstellt.
3.Einen Roboter aus der Bibliothek hinzufügen
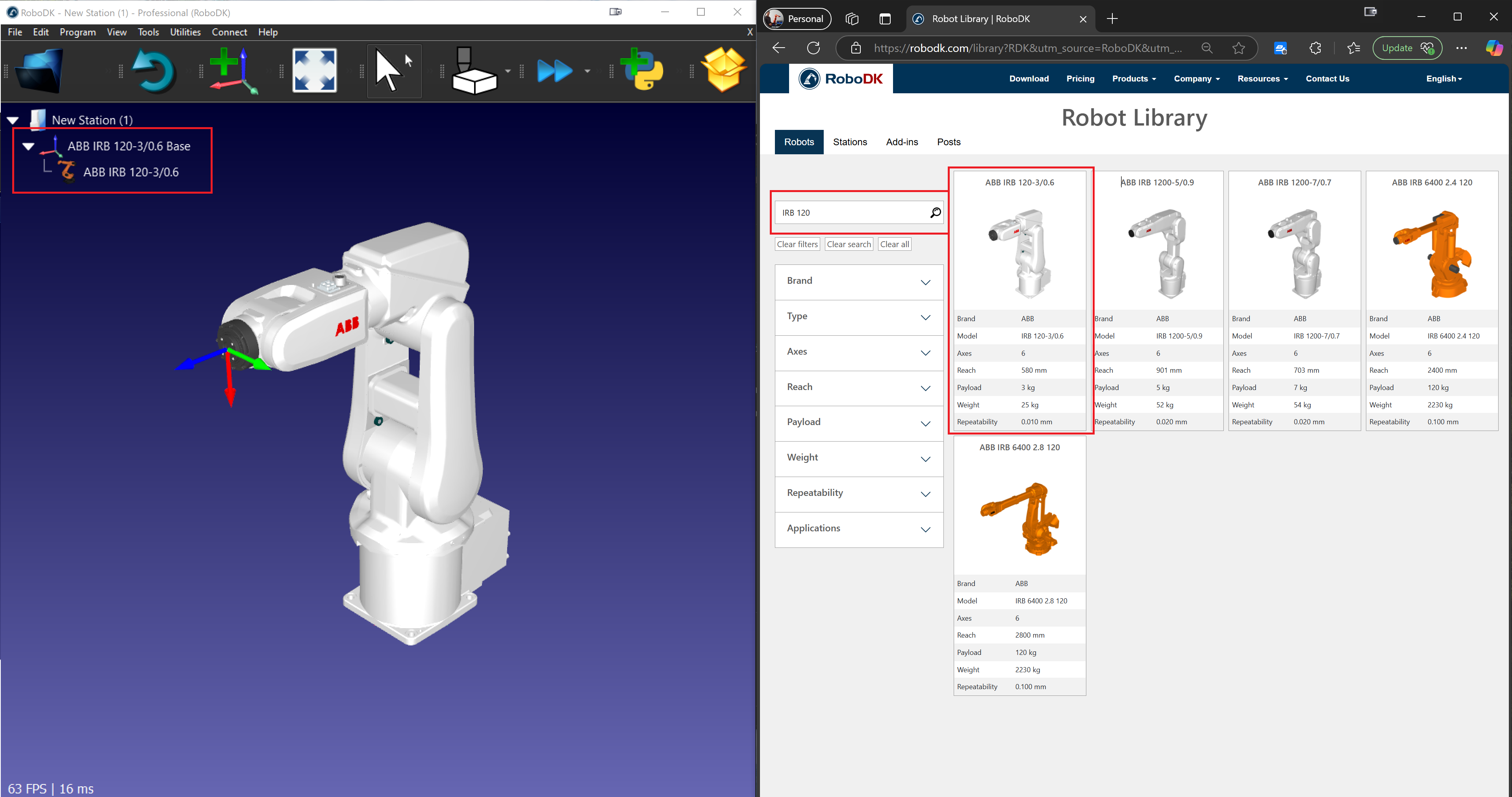
a.Öffnen Sie die Online-Roboterbibliothek, um einen Roboter herunterzuladen
i.Wählen Sie im Hauptmenü Datei → Online-Bibliothek öffnen.
ii.Es öffnet sich das Fenster RoboDK Bibliothek, in dem eine Vielzahl von Industrierobotern angezeigt wird.
b.Wählen und importieren Sie einen Roboter:
i.Verwenden Sie die Suchleiste, um einen für Pick-and-Place-Aufgaben geeigneten Roboter zu finden (z.B. UR10, ABB IRB 120, Fanuc LR Mate).
ii.Klicken Sie auf den gewünschten Roboter und wählen Sie Download.
c.Positionieren Sie den Roboter in der Station:
i.Der Roboter wird automatisch in der Station erscheinen.
ii.Verwenden Sie das Verschieben-Werkzeug, um die Platzierung anzupassen, falls erforderlich.
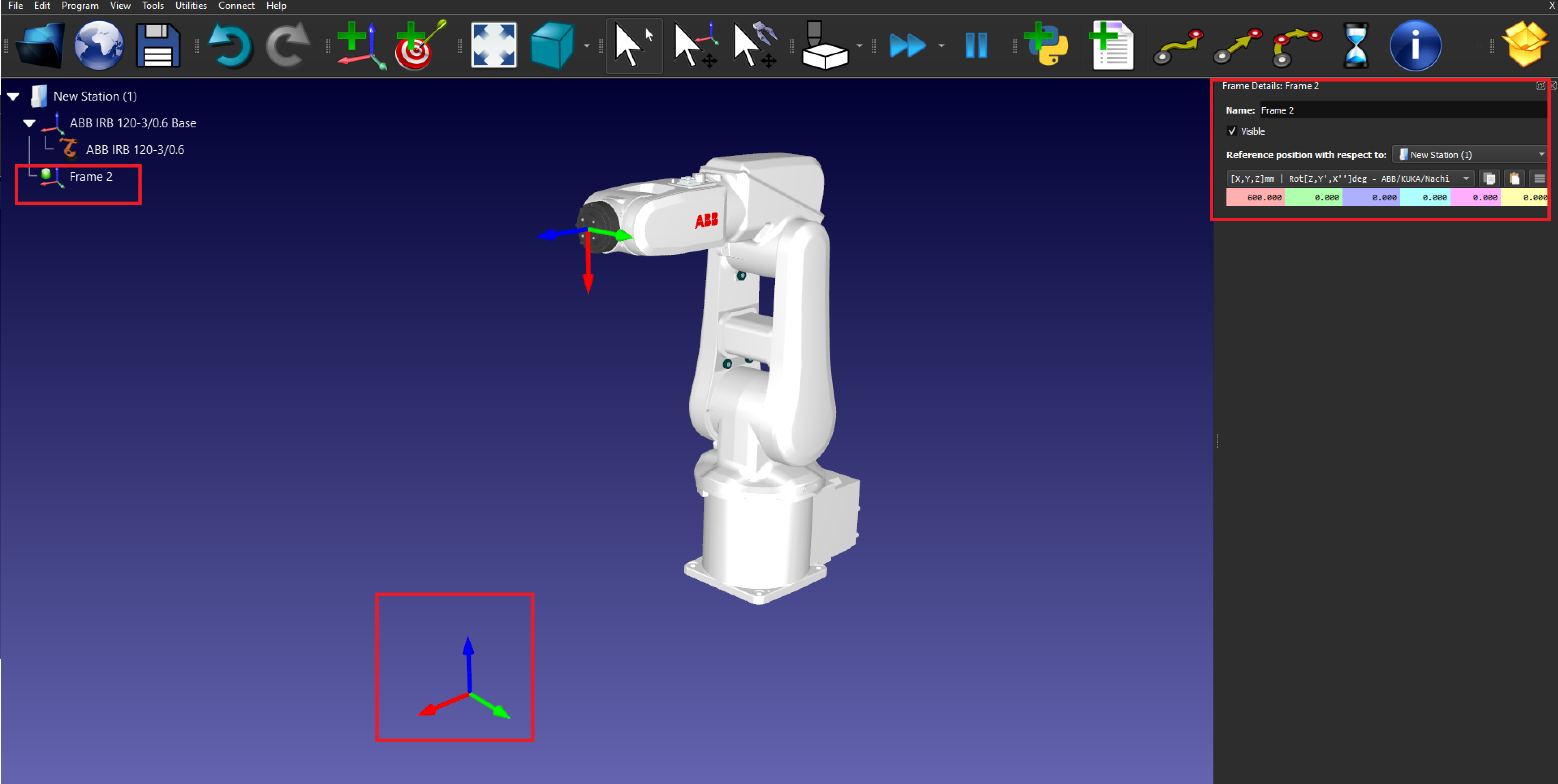
4.Einen Referenzrahmen hinzufügen
a.Erstellen Sie einen Referenzrahmen:
i.Gehen Sie zu Programm → Referenzrahmen hinzufügen.
ii.Ein neuer Bezugsrahmen erscheint in der Stationsstruktur und in der 3D-Ansicht.
b.Positionieren Sie den Referenzrahmen:
i.Doppelklicken Sie auf den Referenzrahmen, um die Koordinaten (X, Y, Z) und die Rotationswerte einzugeben.
ii.Klicken Sie auf OK, um die Position zu speichern.
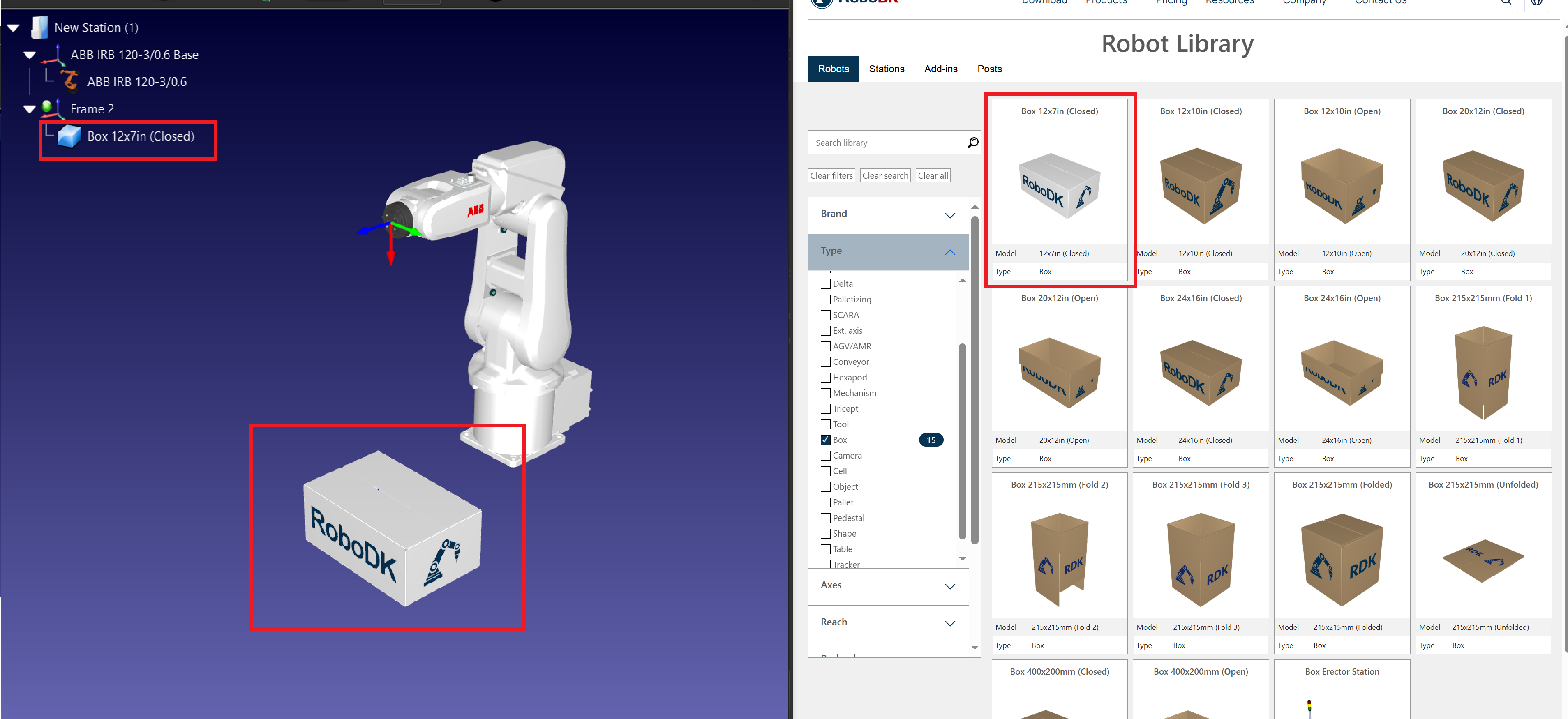
5.3D-Objekte importieren
a.Objektmodelle laden:
iii.Wählen Sie im Hauptmenü Datei → Öffnen.
iv.Durchsuchen Sie die 3D-Modelle der Objekte, die Sie auswählen und platzieren möchten (z.B. STEP- oder IGES-Dateien).
b.Positionieren Sie die Objekte:
v.Verwenden Sie das Verschieben-Werkzeug, um die Position des Objekts im Referenzrahmen anzupassen.
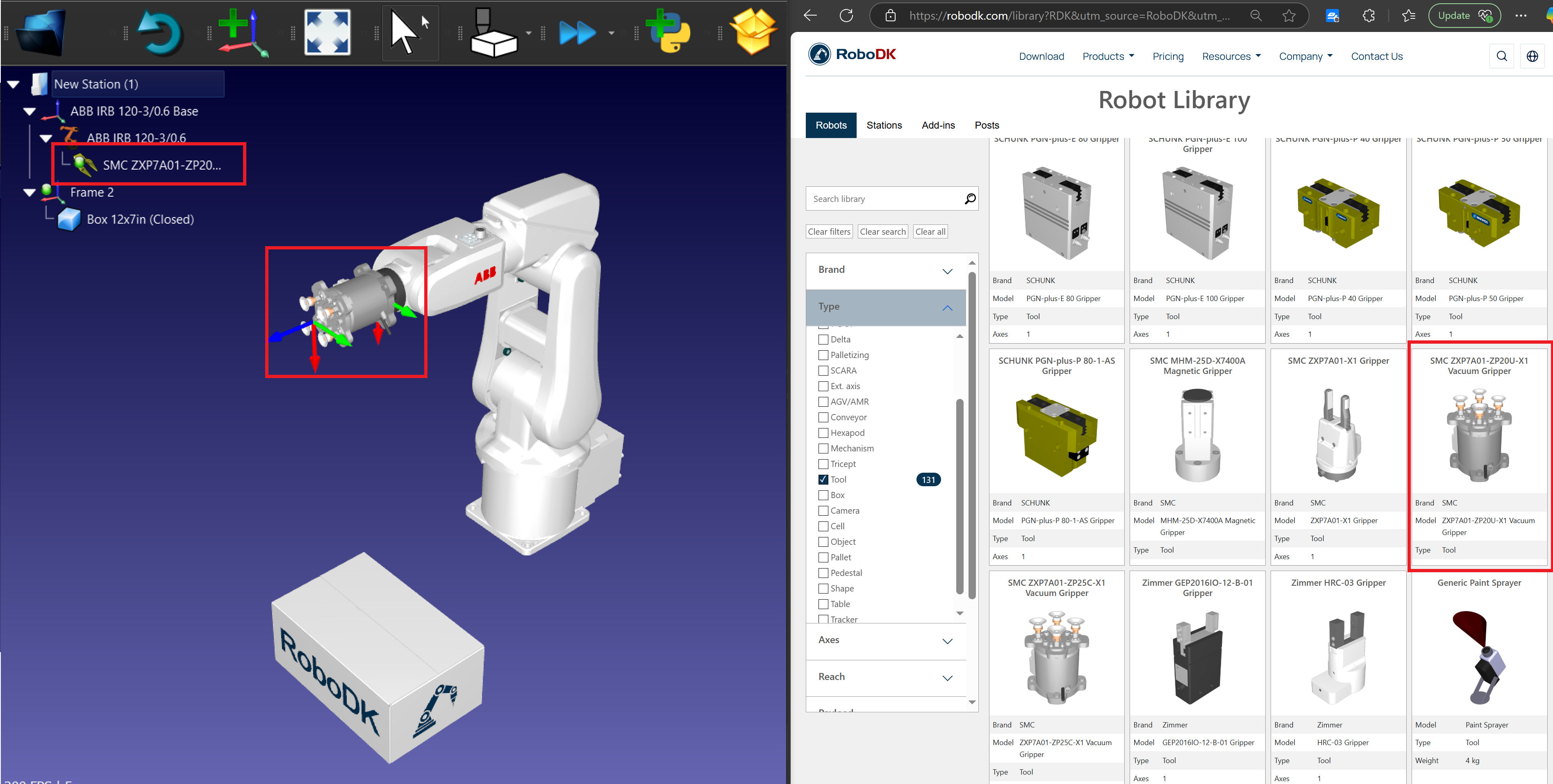
6.Ein Werkzeug hinzufügen (Greifer)
a.Wählen Sie einen Greifer:
i.Gehen Sie im Hauptmenü auf Dienstprogramme → Tool hinzufügen (TCP).
ii.Wählen Sie einen Greifer aus der Roboterbibliothek oder importieren Sie eine eigene Greiferdatei.
b.Befestigen Sie das Werkzeug am Roboter:
i.Klicken Sie mit der rechten Maustaste auf den Greifer in der Stationsstruktur und wählen Sie An Roboter anhängen.
ii.Wählen Sie den passenden Roboterflansch.
c.Definieren Sie den TCP (Tool Center Point): Doppelklicken Sie auf das Werkzeug und geben Sie die TCP-Koordinaten relativ zum Roboterflansch ein.
Zielvorgaben erstellen für Pick and Place
Gehen Sie folgendermaßen vor, um in RoboDK ein einfaches Ziel für eine Pick-and-Place-Anwendung zu erstellen
7.Pick and Place-Ziele hinzufügen:
a.Bewegen Sie den Roboter in die gewünschte Entnahmeposition.
b.Wählen Sie Programm → Ziel einlernen, um die Position zu speichern.
c.Wiederholen Sie dies für die Positionen Pick, Retract Pick, Place und Retract Place.
8.Organisieren Sie die Ziele:
a.Benennen Sie die Ziele der Übersichtlichkeit halber um (z.B. Approach_Pick, Pick, Place). Drücken Sie F2, um die Ziele umzubenennen.
b.Vergessen Sie nicht, die Ziele unter den entsprechenden Bezugsrahmen im Stationsbaum zu erstellen.
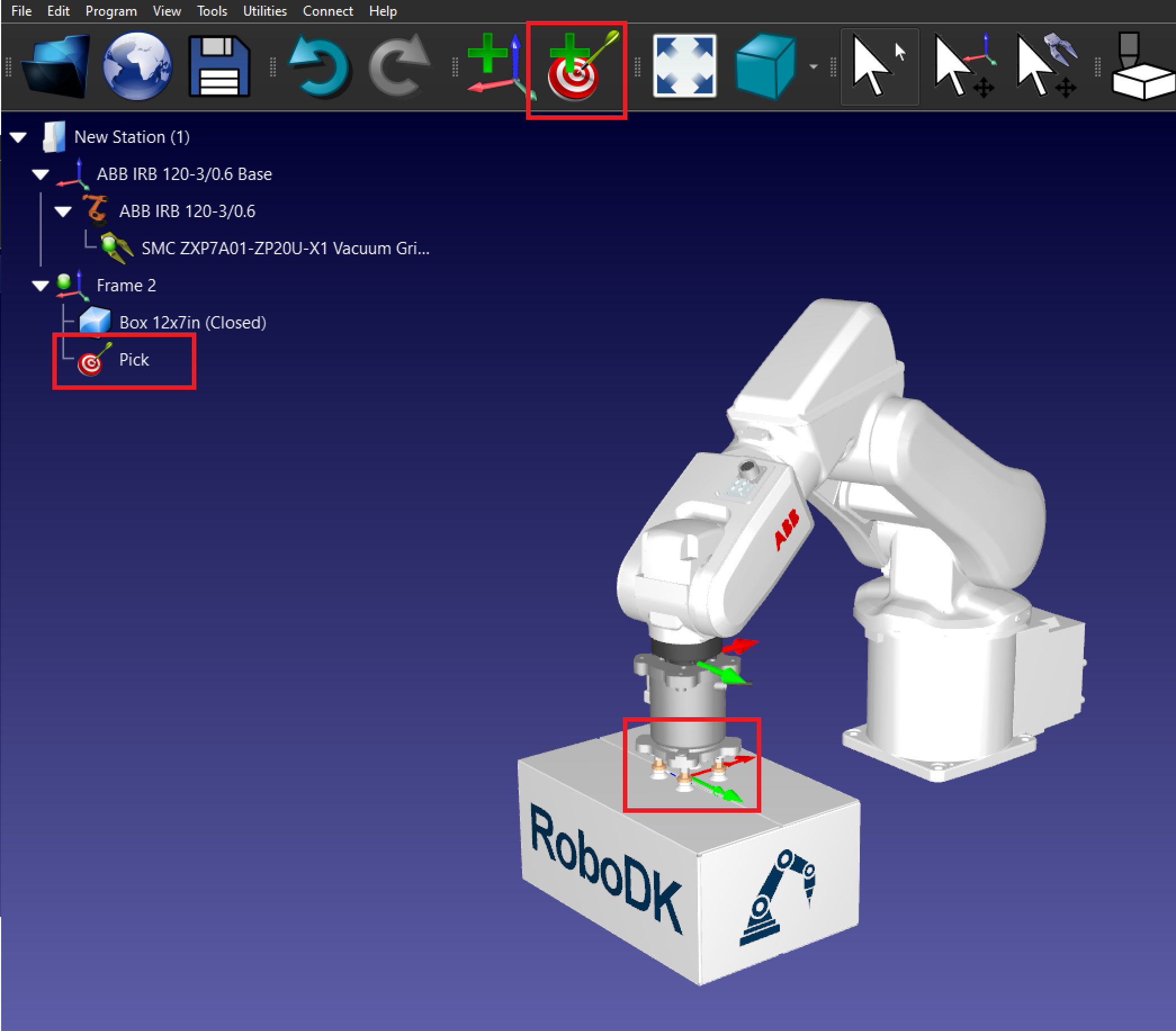
9.Erstellen Sie das Ziel Pick: Platzieren Sie den Roboter über der Box und erstellen Sie ein Ziel namens Pick.
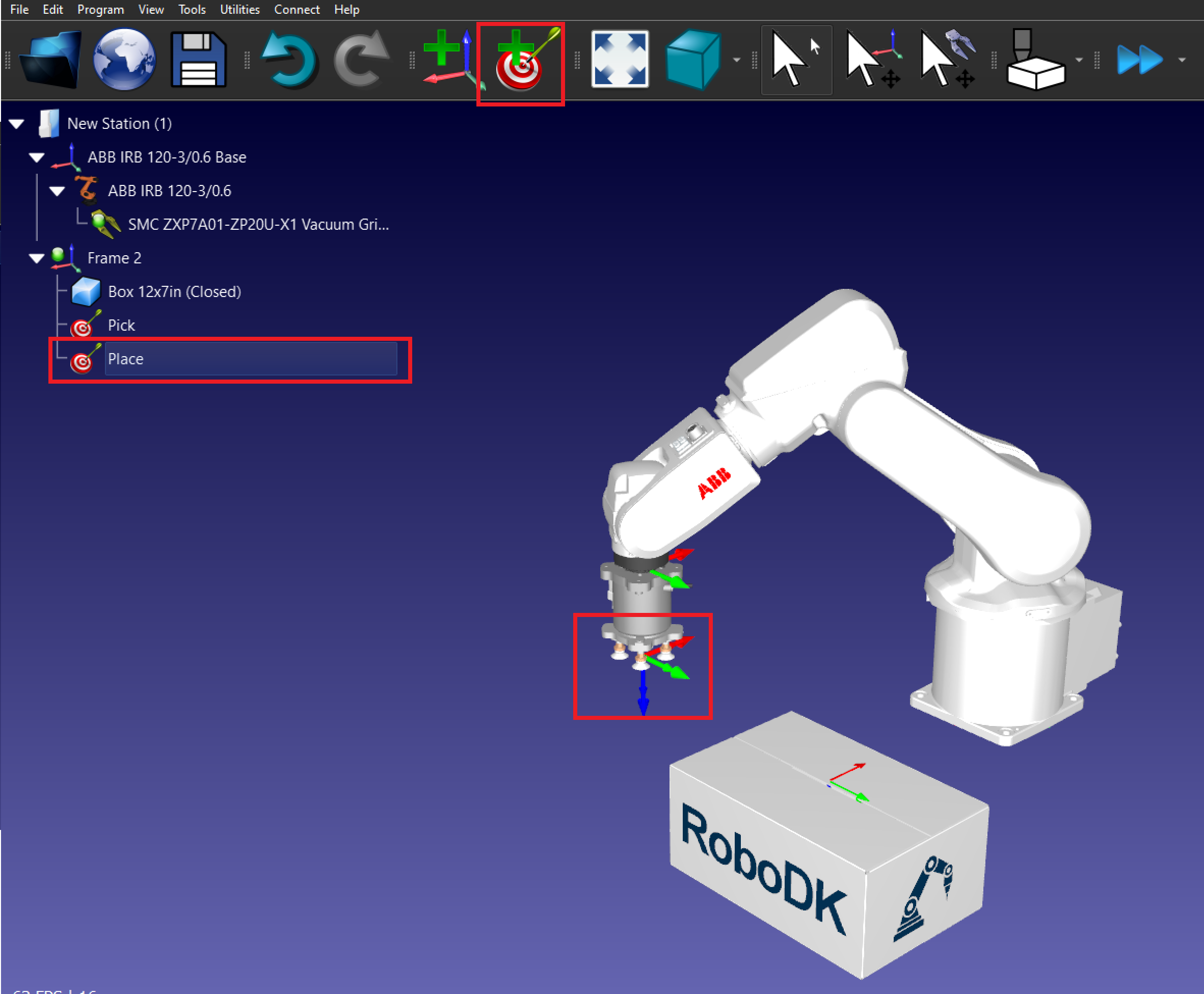
10.Erstellen Sie das Ziel Platzieren: Bewegen Sie den Roboter an die Stelle, an der Sie die Box platzieren möchten, und erstellen Sie ein Ziel namens Platzieren.
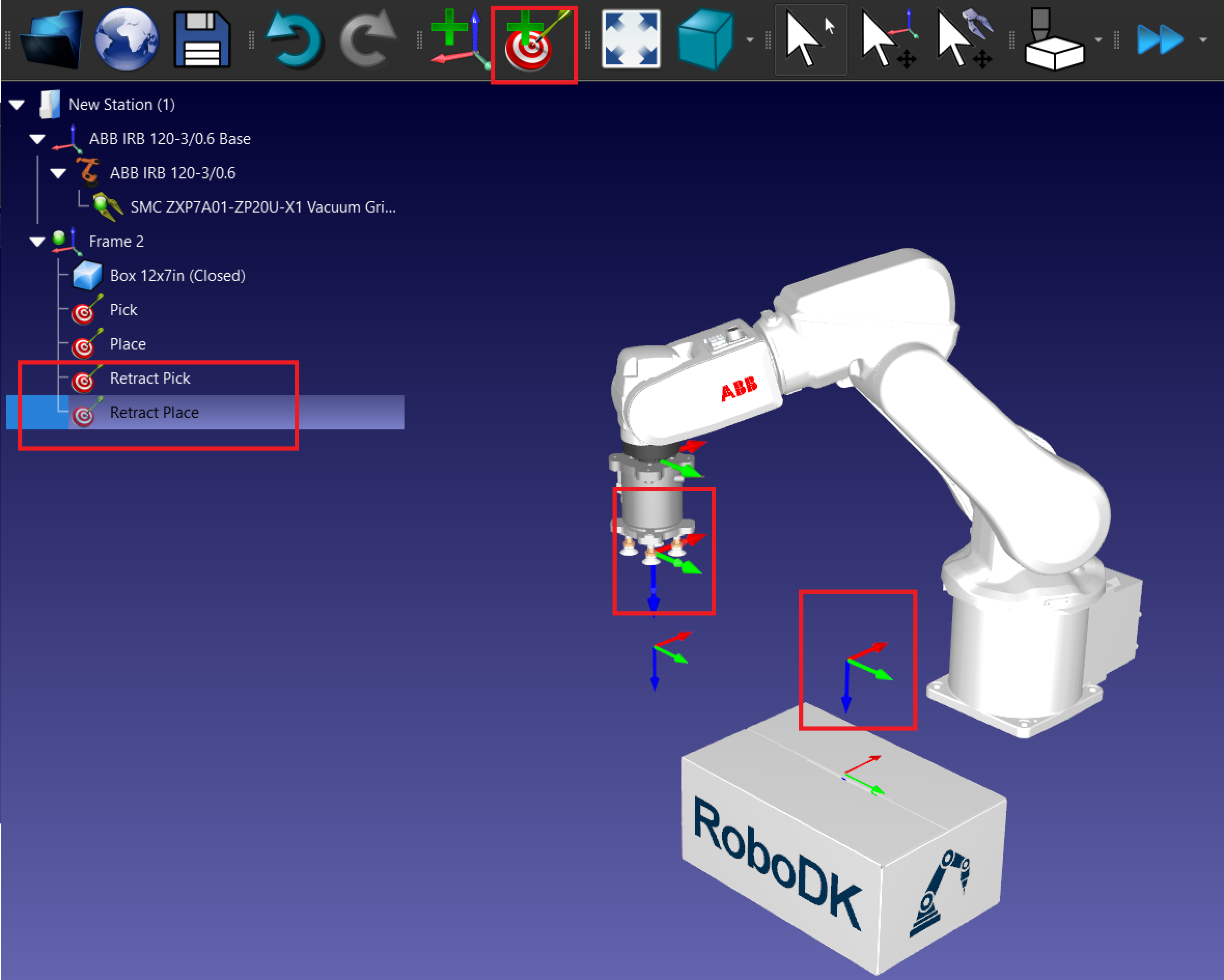
11.Erstellen Sie die Rückzugsziele:
a.Bewegen Sie den Roboter zum Pick-Ziel und auf der Z-Achse nach oben.
b.Erstellen Sie ein neues Ziel namens Pick Retract.
c.Wiederholen Sie den Vorgang mit der Zielscheibe Place.
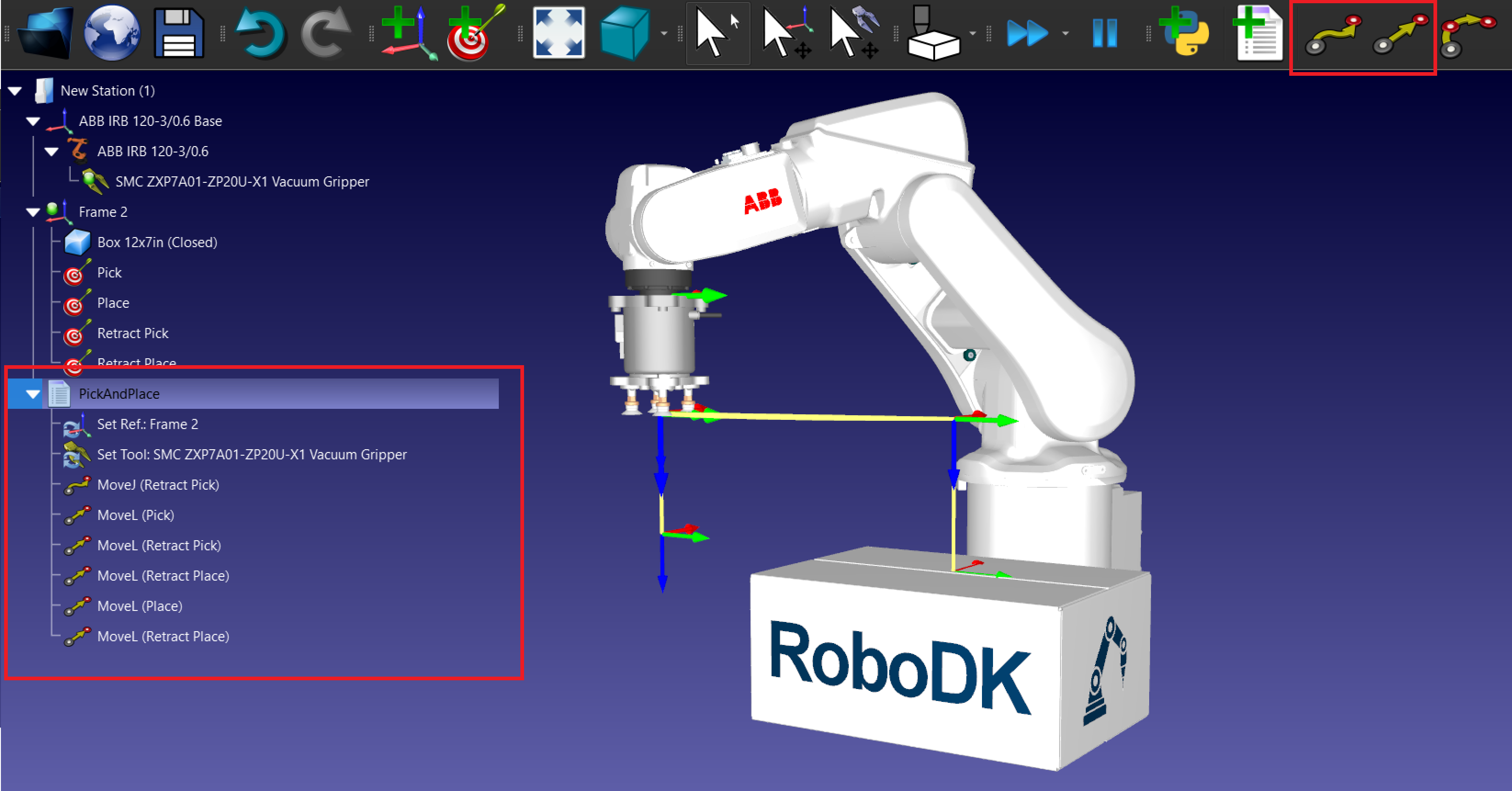
Programm zur Auswahl und Platzierung erstellen
Folgen Sie diesen Schritten, um in RoboDK ein einfaches Programm zum Aufnehmen und Ablegen eines Kartons mit einem 6-achsigen Roboterarm und einem Vakuumgreifer zu erstellen.
1.Programmieren Sie den Pick-and-Place-Vorgang :
a.Erstellen Sie ein neues Programm: Gehen Sie zu Programm → Programm hinzufügen und nennen Sie es PickAndPlace.
b.Add-in Bewegungsanweisungen:
i.Fügen Sie MoveJ- oder MoveL-Anweisungen für jedes Ziel hinzu.
ii.Bewegen Sie den Roboter zuerst zum Rückzugsziel, erstellen Sie dann ein MoveL zum Pick-Ziel und zurück zum Rückzug.
iii.Wiederholen Sie den Vorgang mit der Zielscheibe Place.
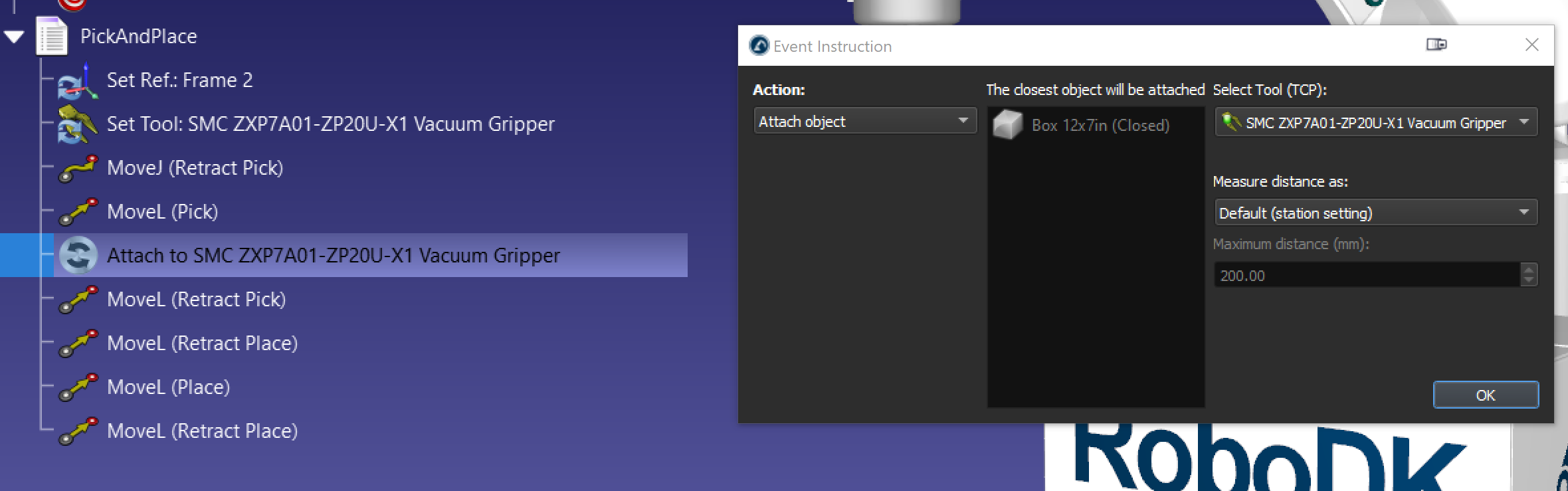
2.Add-in Ereignis zum Auswählen und Platzieren des Objekts.
a.Um ein Ereignis hinzuzufügen, gehen Sie zu Programm → Simulation Ereignisanweisung.
b.Fügen Sie ein Ereignis mit der Aktion Objekt anhängen hinzu, um den Rahmen nach dem MoveL (Pick) auszuwählen.
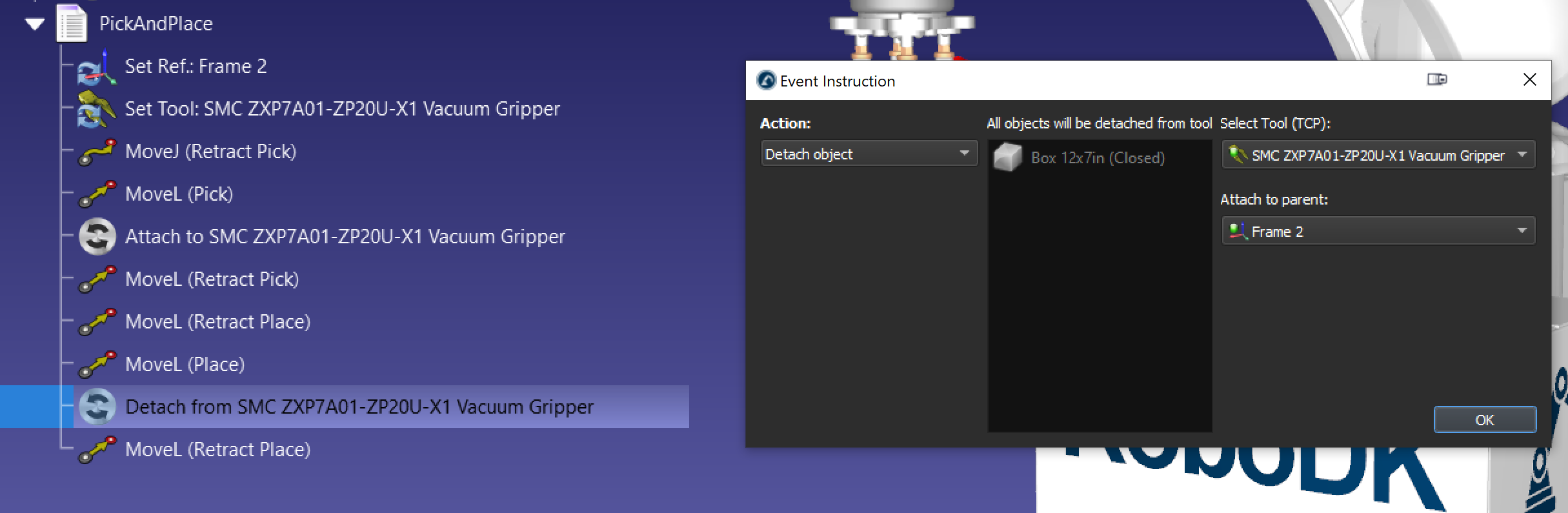
c.Fügen Sie ein Ereignis mit der Aktion Objekt ablösen hinzu und platzieren Sie die Box nach MoveL (Place). Mit der Option An übergeordnetes Objekt anhängen können Sie das Objekt an ein neues anhängen, sobald es sich vom Greifer gelöst hat.
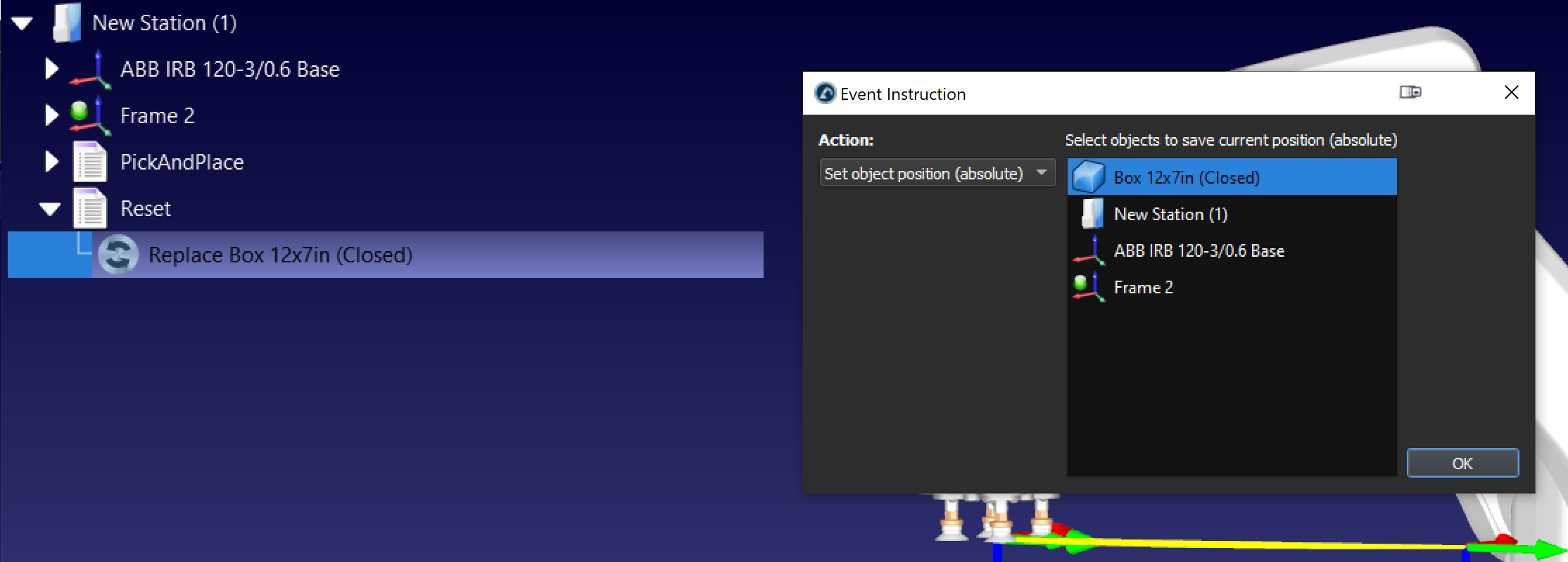
d.Es empfiehlt sich, auch ein separates Programm mit einer Ereignisaktion Objektposition setzen zu erstellen, um die Box bei Bedarf auf ihre Ursprungsposition zurückzusetzen.
Wenn Sie diese Schritte befolgen, können Sie in RoboDK erfolgreich eine einfache Pick-and-Place-Station erstellen.