Erstellen Sie ein neues RoboDK Projekt
Diese Schritte zeigen Ihnen, wie Sie in RoboDK ein neues Projekt (auch als Station bezeichnet) für eine Pick-and-Place-Anwendung erstellen.
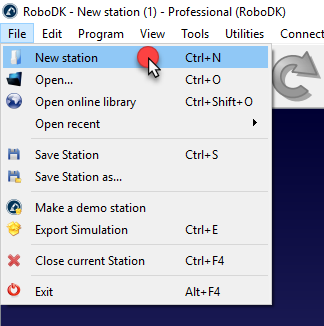
1.RoboDK öffnen: Starten Sie die RoboDK-Anwendung auf Ihrem Computer.
2.Erstellen Sie eine neue Station: Wählen Sie im Hauptmenü von RoboDK den Befehl Datei - Neue Station - Eine neue, leere Station wird als Ihr Arbeitsbereich erstellt.
3.Einen Roboter aus der Bibliothek hinzufügen
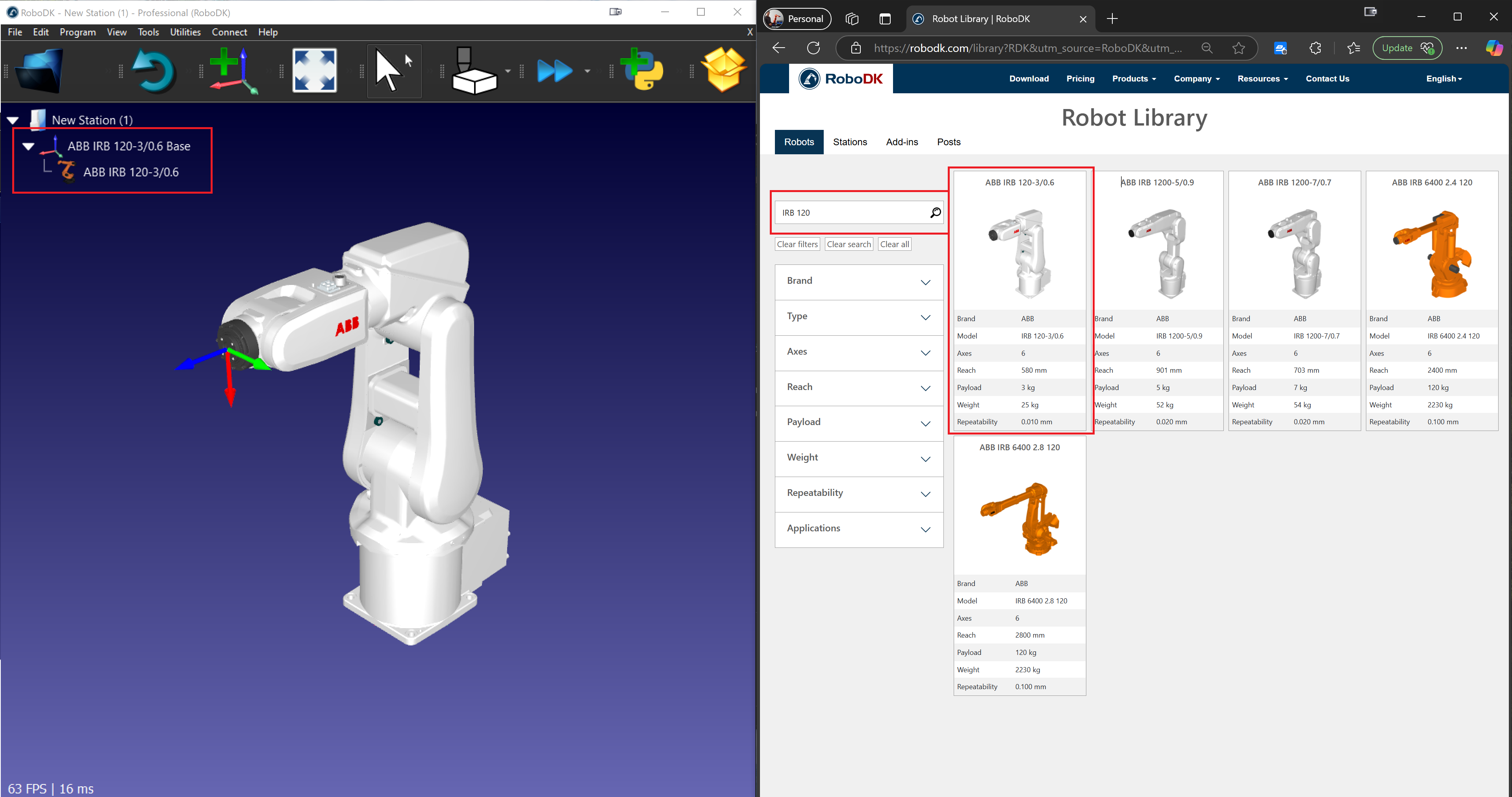
a.Öffnen Sie die Online-Roboterbibliothek, um einen Roboter herunterzuladen
i.Wählen Sie im Hauptmenü Datei → Online-Bibliothek öffnen.
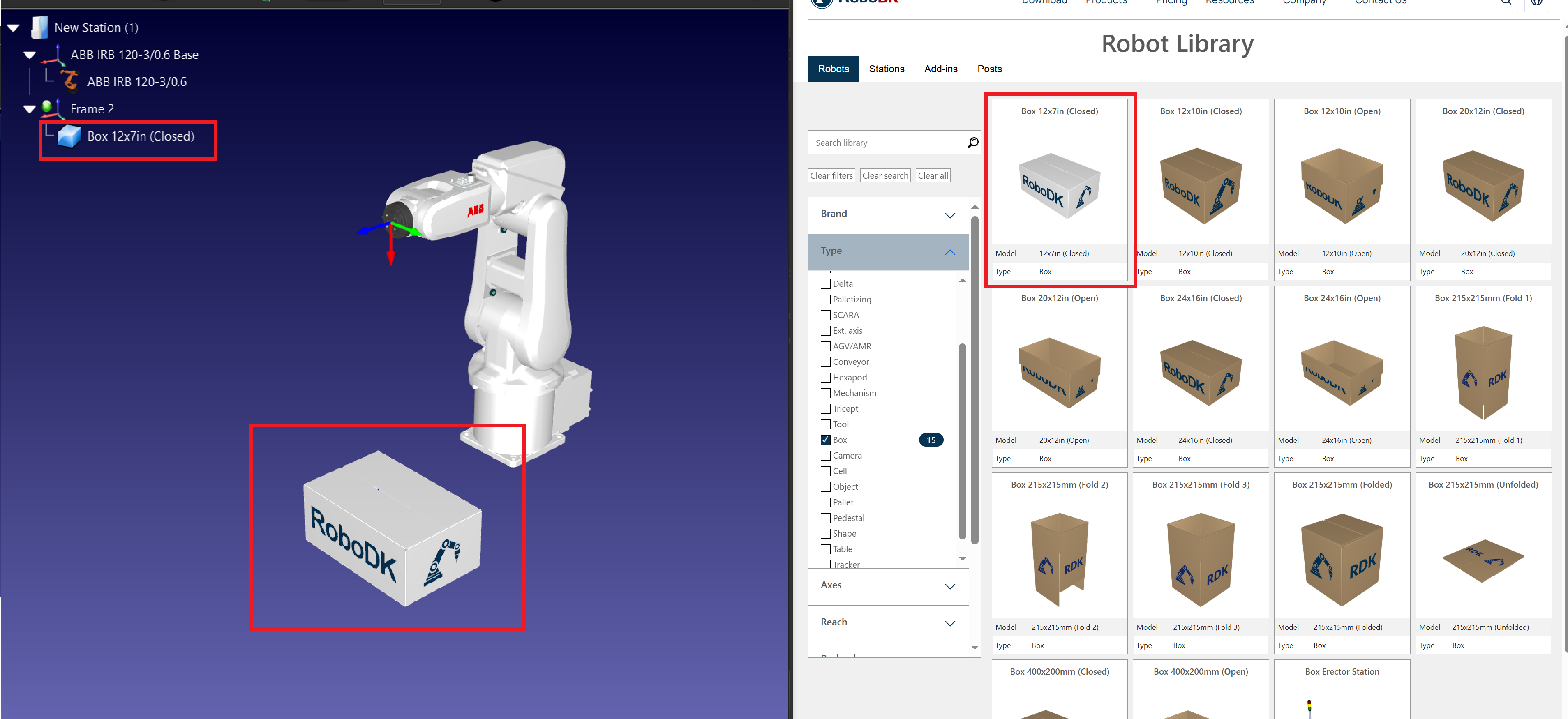
ii.Es öffnet sich das Fenster RoboDK Bibliothek, in dem eine Vielzahl von Industrierobotern angezeigt wird.
b.Wählen und importieren Sie einen Roboter:
i.Verwenden Sie die Suchleiste, um einen für Pick-and-Place-Aufgaben geeigneten Roboter zu finden (z.B. UR10, ABB IRB 120, Fanuc LR Mate).
ii.Klicken Sie auf den gewünschten Roboter und wählen Sie Download.
c.Positionieren Sie den Roboter in der Station:
i.Der Roboter wird automatisch in der Station erscheinen.
ii.Verwenden Sie das Verschieben-Werkzeug, um die Platzierung anzupassen, falls erforderlich.
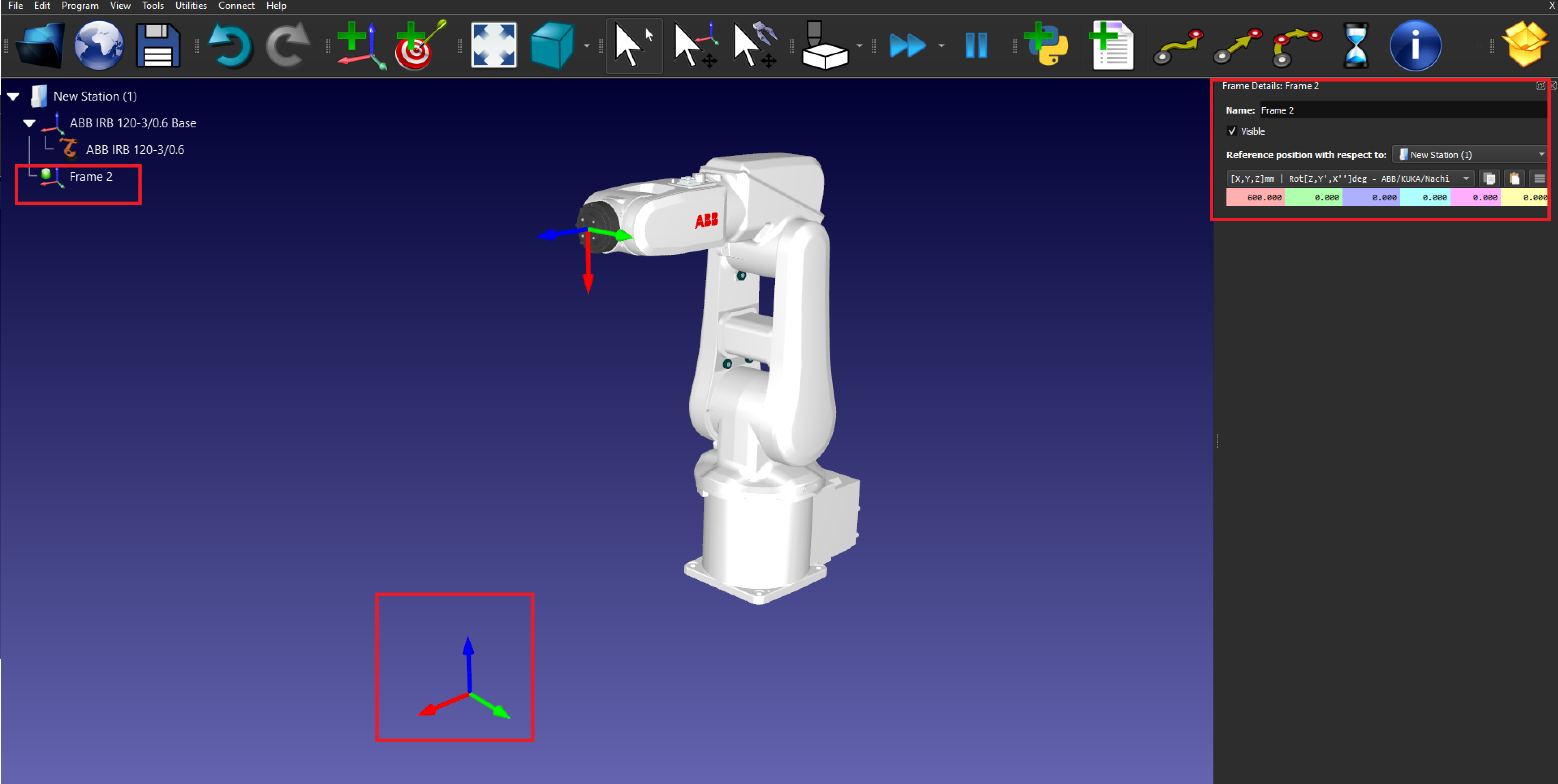
4.Einen Referenzrahmen hinzufügen
a.Erstellen Sie einen Referenzrahmen:
i.Gehen Sie zu Programm → Referenzrahmen hinzufügen.
ii.Ein neuer Bezugsrahmen erscheint in der Stationsstruktur und in der 3D-Ansicht.
b.Positionieren Sie den Referenzrahmen:
i.Doppelklicken Sie auf den Referenzrahmen, um die Koordinaten (X, Y, Z) und die Rotationswerte einzugeben.
ii.Klicken Sie auf OK, um die Position zu speichern.
5.3D-Objekte importieren
a.Objektmodelle laden:
iii.Wählen Sie im Hauptmenü Datei → Öffnen.
iv.Durchsuchen Sie die 3D-Modelle der Objekte, die Sie auswählen und platzieren möchten (z.B. STEP- oder IGES-Dateien).
b.Positionieren Sie die Objekte:
v.Verwenden Sie das Verschieben-Werkzeug, um die Position des Objekts im Referenzrahmen anzupassen.
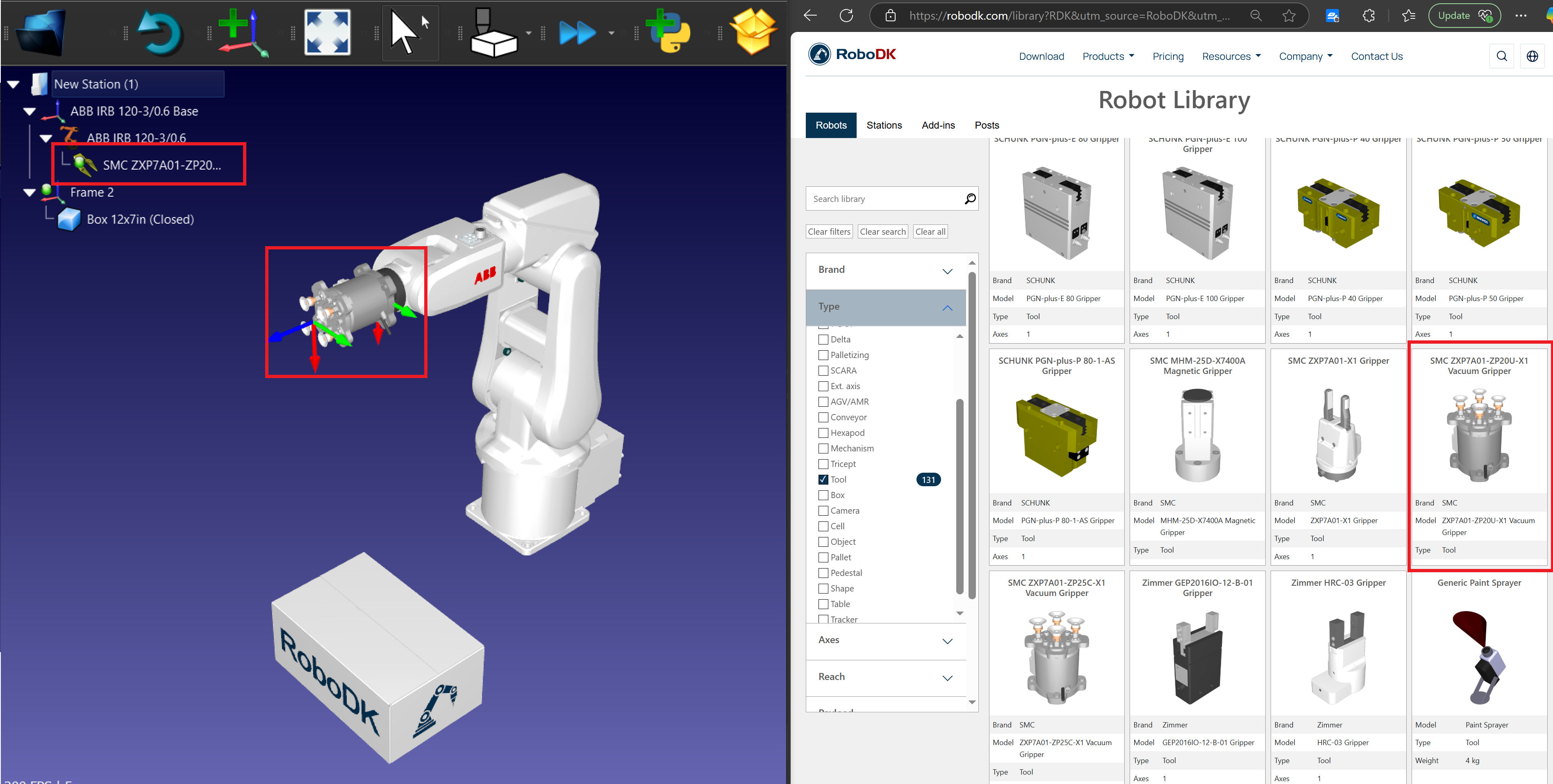
6.Ein Werkzeug hinzufügen (Greifer)
a.Wählen Sie einen Greifer:
i.Gehen Sie im Hauptmenü auf Dienstprogramme → Tool hinzufügen (TCP).
ii.Wählen Sie einen Greifer aus der Roboterbibliothek oder importieren Sie eine eigene Greiferdatei.
b.Befestigen Sie das Werkzeug am Roboter:
i.Klicken Sie mit der rechten Maustaste auf den Greifer in der Stationsstruktur und wählen Sie An Roboter anhängen.
ii.Wählen Sie den passenden Roboterflansch.
c.Definieren Sie den TCP (Tool Center Point): Doppelklicken Sie auf das Werkzeug und geben Sie die TCP-Koordinaten relativ zum Roboterflansch ein.