Programm zur Auswahl und Platzierung erstellen
Folgen Sie diesen Schritten, um in RoboDK ein einfaches Programm zum Aufnehmen und Ablegen eines Kartons mit einem 6-achsigen Roboterarm und einem Vakuumgreifer zu erstellen.
1.Programmieren Sie den Pick-and-Place-Vorgang :
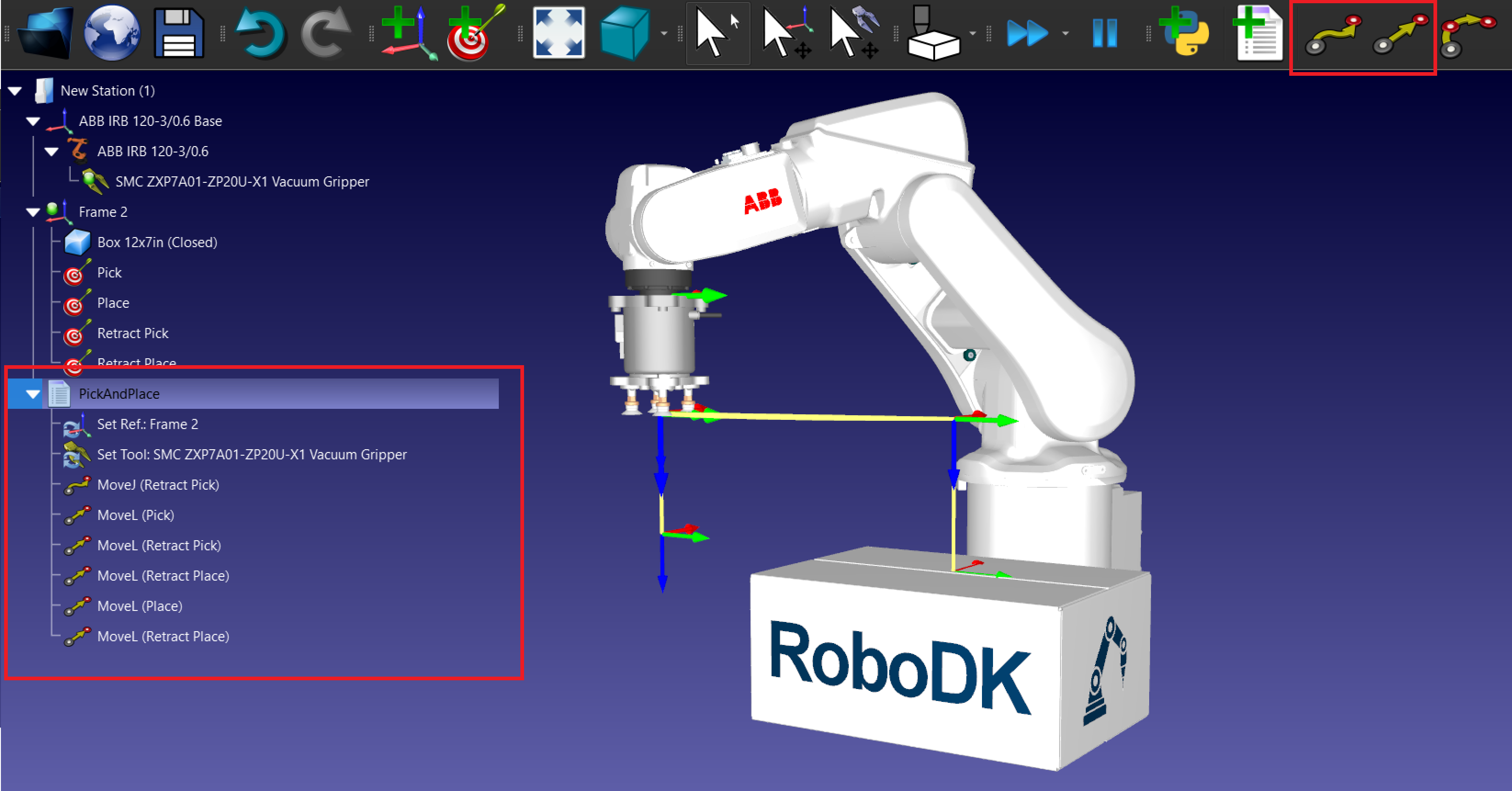
a.Erstellen Sie ein neues Programm: Gehen Sie zu Programm → Programm hinzufügen und nennen Sie es PickAndPlace.
b.Add-in Bewegungsanweisungen:
i.Fügen Sie MoveJ- oder MoveL-Anweisungen für jedes Ziel hinzu.
ii.Bewegen Sie den Roboter zuerst zum Rückzugsziel, erstellen Sie dann ein MoveL zum Pick-Ziel und zurück zum Rückzug.
iii.Wiederholen Sie den Vorgang mit der Zielscheibe Place.
2.Add-in Ereignis zum Auswählen und Platzieren des Objekts.
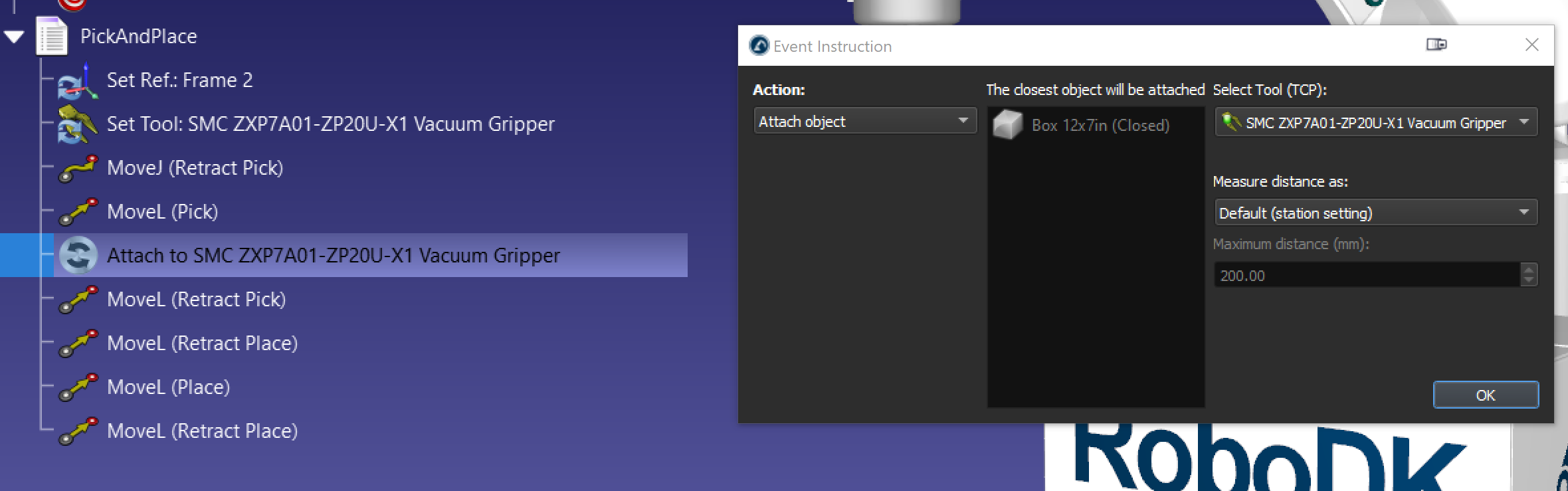
a.Um ein Ereignis hinzuzufügen, gehen Sie zu Programm → Simulation Ereignisanweisung.
b.Fügen Sie ein Ereignis mit der Aktion Objekt anhängen hinzu, um den Rahmen nach dem MoveL (Pick) auszuwählen.
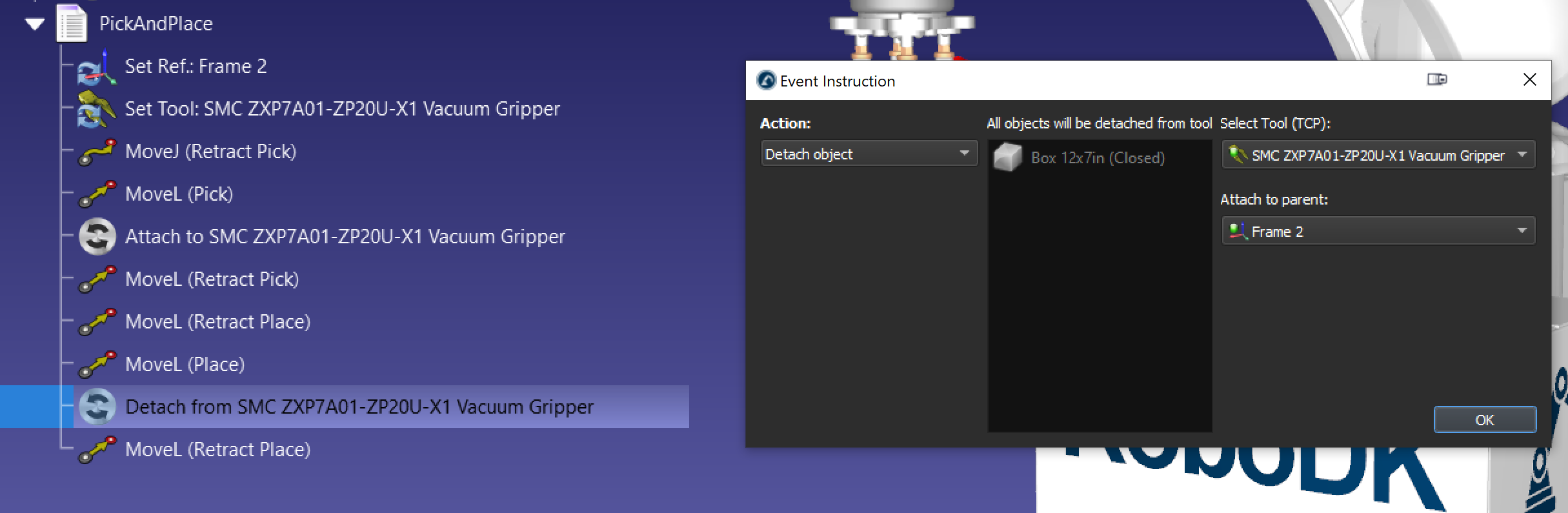
c.Fügen Sie ein Ereignis mit der Aktion Objekt ablösen hinzu und platzieren Sie die Box nach MoveL (Place). Mit der Option An übergeordnetes Objekt anhängen können Sie das Objekt an ein neues anhängen, sobald es sich vom Greifer gelöst hat.
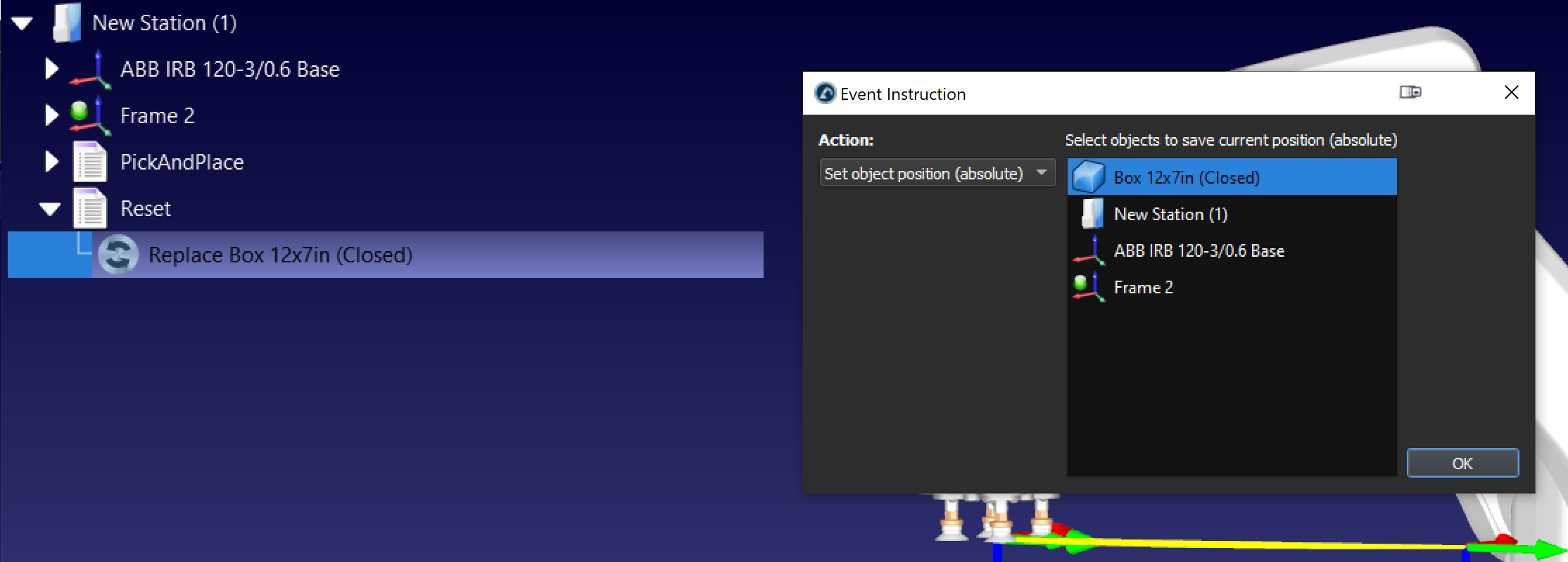
d.Es empfiehlt sich, auch ein separates Programm mit einer Ereignisaktion Objektposition setzen zu erstellen, um die Box bei Bedarf auf ihre Ursprungsposition zurückzusetzen.
Wenn Sie diese Schritte befolgen, können Sie in RoboDK erfolgreich eine einfache Pick-and-Place-Station erstellen.