Zielvorgaben erstellen für Pick and Place
Gehen Sie folgendermaßen vor, um in RoboDK ein einfaches Ziel für eine Pick-and-Place-Anwendung zu erstellen
7.Pick and Place-Ziele hinzufügen:
a.Bewegen Sie den Roboter in die gewünschte Entnahmeposition.
b.Wählen Sie Programm → Ziel einlernen, um die Position zu speichern.
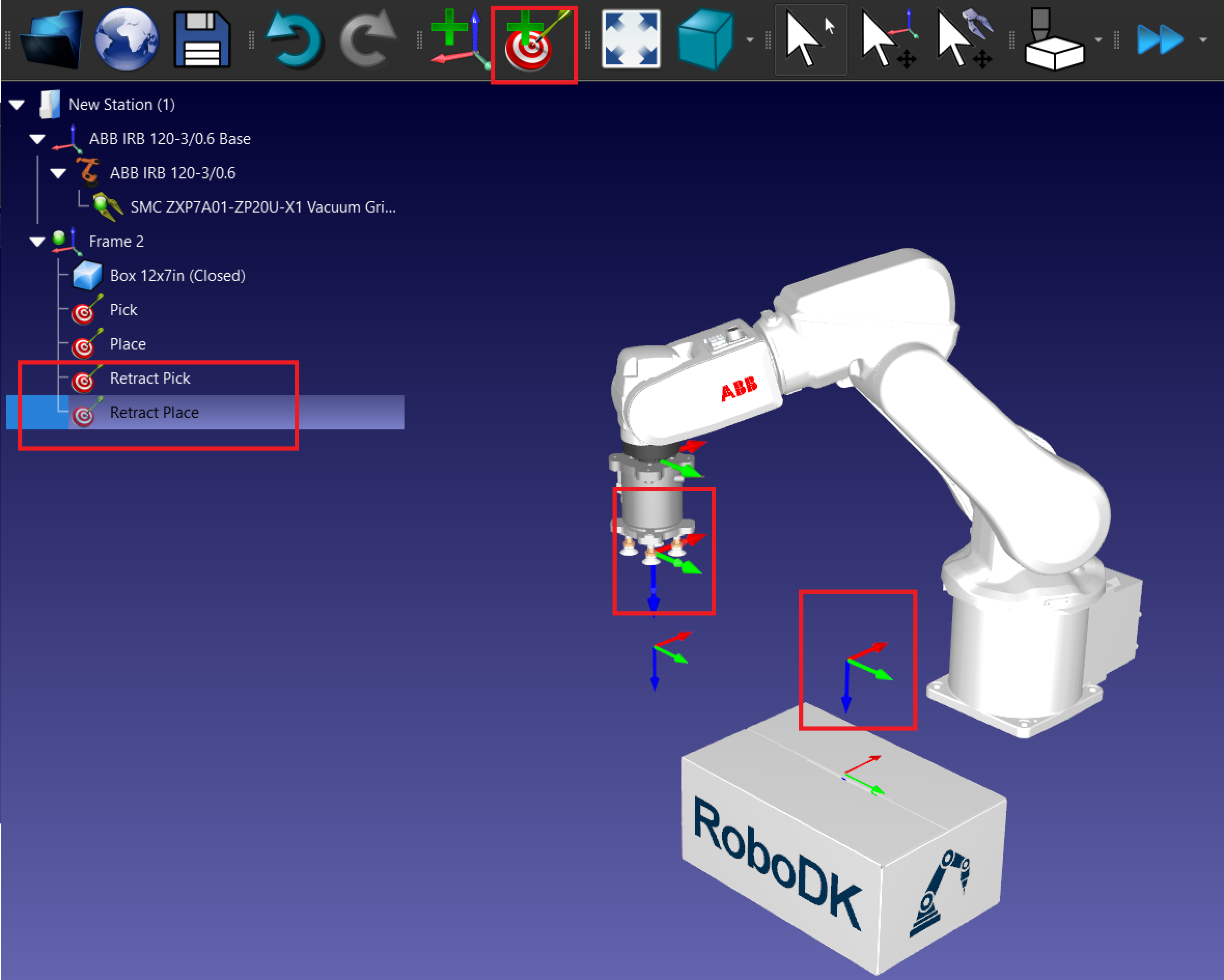
c.Wiederholen Sie dies für die Positionen Pick, Retract Pick, Place und Retract Place.
8.Organisieren Sie die Ziele:
a.Benennen Sie die Ziele der Übersichtlichkeit halber um (z.B. Approach_Pick, Pick, Place). Drücken Sie F2, um die Ziele umzubenennen.
b.Vergessen Sie nicht, die Ziele unter den entsprechenden Bezugsrahmen im Stationsbaum zu erstellen.
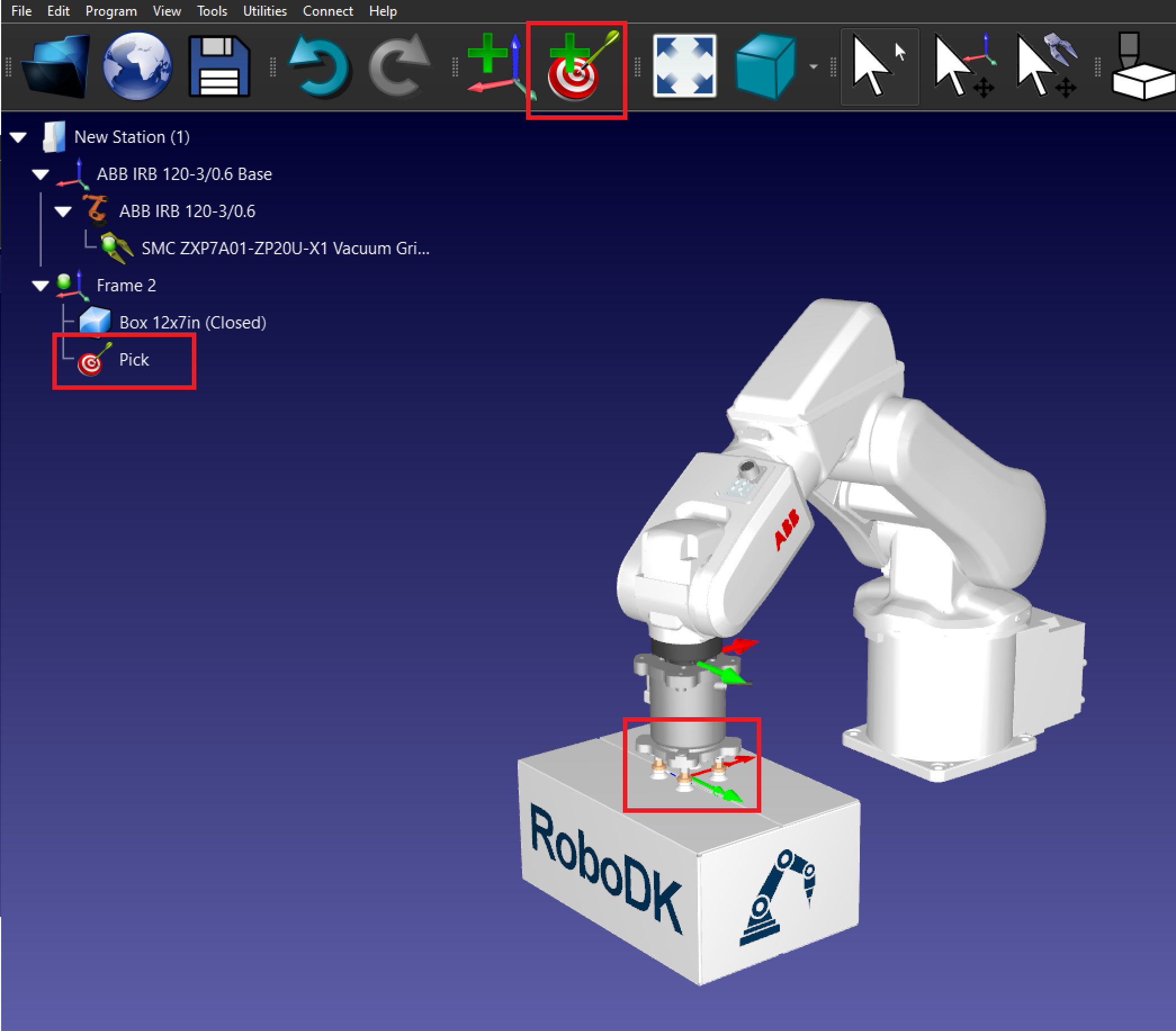
9.Erstellen Sie das Ziel Pick: Platzieren Sie den Roboter über der Box und erstellen Sie ein Ziel namens Pick.
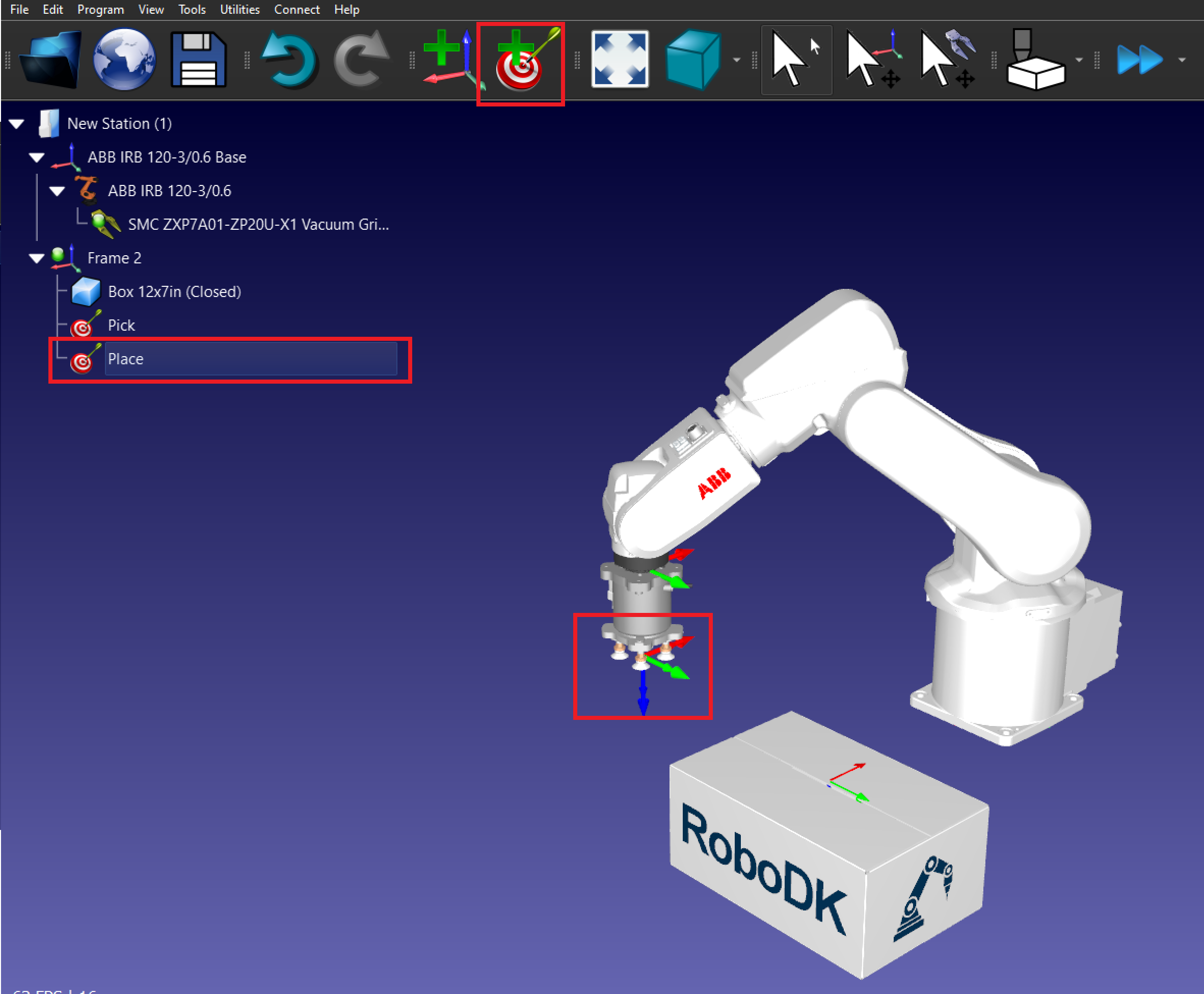
10.Erstellen Sie das Ziel Platzieren: Bewegen Sie den Roboter an die Stelle, an der Sie die Box platzieren möchten, und erstellen Sie ein Ziel namens Platzieren.
11.Erstellen Sie die Rückzugsziele:
a.Bewegen Sie den Roboter zum Pick-Ziel und auf der Z-Achse nach oben.
b.Erstellen Sie ein neues Ziel namens Pick Retract.
c.Wiederholen Sie den Vorgang mit der Zielscheibe Place.