RoboDK Station
Sobald wir den Werkzeugweg des Roboters in RoboDK fertig haben, sollten wir sicherstellen, dass die virtuelle Roboterzelle mit der realen Einrichtung übereinstimmt. In RoboDK stellen wir sicher, dass wir das richtige Werkzeug und den richtigen Referenzrahmen für den Fertigungsvorgang verwenden, bevor wir das Roboterprogramm erstellen.
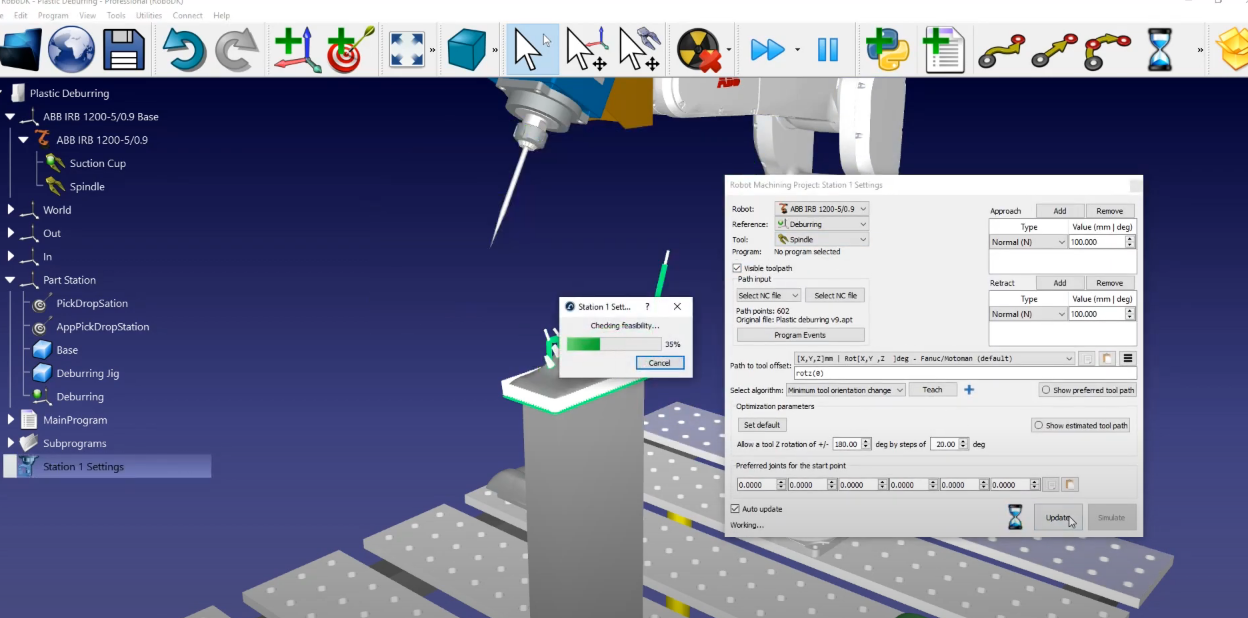
In diesem Beispiel haben wir die Referenz Entgraten und das Werkzeug Spindel ausgewählt. Wählen Sie Aktualisieren➔ Simulieren.
Wenn Sie die Reihenfolge oder den Sinn eines Pfadabschnitts ändern möchten, gehen Sie folgendermaßen vor:
1.CAM-Projekte werden in der Regel bereits mit ihren An- und Abfahrbewegungen ausgeliefert, so dass wir unsere entfernen können: Gehen Sie einfach auf "Anflug" und "Rückzug" und wählen Sie Entfernen. Wählen Sie Aktualisieren und dann Simulieren.
2.In diesem Beispiel ergeben die Standardparameter ein gültiges Ergebnis. Die einzige zusätzliche Einstellung, die wir eventuell ändern möchten, ist die Aktivierung und Deaktivierung der Spindel: Öffnen Sie Programmereignisse➔ Fügen Sie ein Unterprogramm in "Bahn anfahren" und "Bahn zurückfahren" hinzu, indem Sie jede Option abhaken und "Spindel (1)" in Bahn anfahren und "Spindel (0)" in Bahn zurückfahren schreiben. Dies setzt voraus, dass Sie in der Steuerung eine Funktion definiert haben, die einen Parameter zum Aktivieren oder Deaktivieren der Spindel akzeptieren kann.
3.Wählen Sie Aktualisieren.
Jetzt müssen wir den Namen des Programms, das wir erstellt haben, ändern "Station 1" und das "Hauptprogramm" starten
Das letzte, was wir tun müssen, ist, das Roboterprogramm zu erstellen. Da wir einen ABB-Roboter verwenden, müssen wir eine Mod-Datei für die ABB-Robotersteuerung exportieren, die die ABB-eigene Programmiersprache RAPID verwendet.
1.Stellen Sie sicher, dass wir den richtigen Postprozessor verwenden: Station auswählen➔ Postprozessor auswählen➔ ABB RAPID IRC 5.
2.Klicken Sie mit der rechten Maustaste auf das Programm Station1 und wählen Sie Roboterprogramm generieren.
Sie sollten das Roboterprogramm automatisch in einem Texteditor sehen. Sie können alle spezifischen Fahrbefehle und die Syntax sehen, die von der ABB-Robotersteuerung benötigt werden.