RoboDK Station
Im nächsten Schritt überprüfen Sie, ob die Reihenfolge, in der die Pfadabschnitte ausgeführt werden, korrekt ist, indem Sie
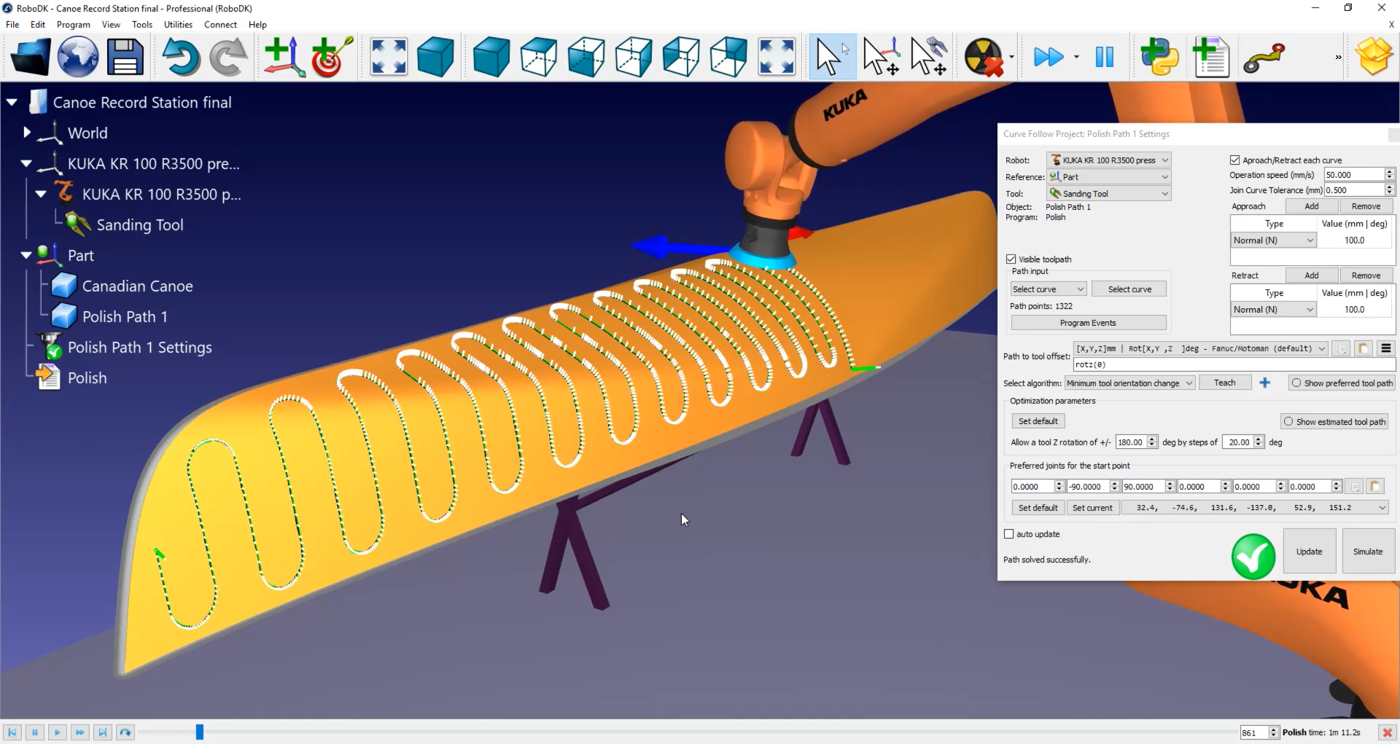
Hinweis: Bei komplexeren Projekten wie diesem sollten Sie die Option "Automatisch aktualisieren" deaktivieren, da dies den Einstellungsprozess verlangsamt, da der Pfad bei jeder einzelnen Änderung neu berechnet wird. Sie können ihn manuell aktualisieren, indem Sie auf die Schaltfläche Aktualisieren klicken.
Sie können die kleinen weißen Linien sehen, die aus dem Pfad des Kanus kommen. Das sind die Normalen für die Oberfläche. In diesem Beispiel scheinen alle korrekt importiert worden zu sein.
Folgen Sie diesen Schritten, um die Richtung des Pfades festzulegen:
1.Wählen Sie
2.Klicken Sie auf Kurve auswählen.
Jetzt können Sie die Reihenfolge und Richtung sehen, in der die Pfadsegmente ausgeführt werden. Wenn Sie die Richtung ändern möchten, klicken Sie mit der rechten Maustaste darauf und wählen Sie Richtung wechseln.
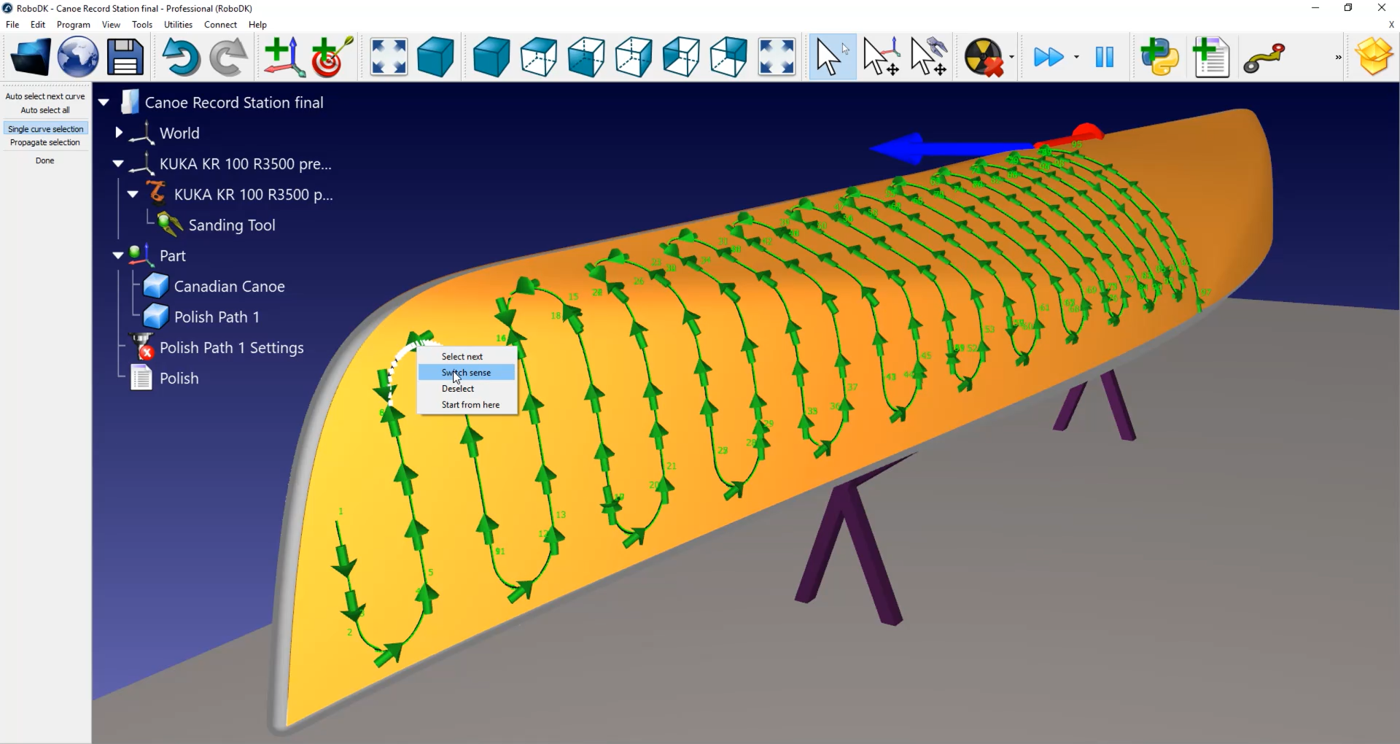
In diesem Fall muss der Pfad neu erstellt werden:
1.Klicken Sie mit der rechten Maustaste auf eine leere Stelle des Senders (d.h. auf den blauen Hintergrund).
2.Wählen Sie Auswahl zurücksetzen.
3.Wählen Sie die Linie, mit der Sie beginnen möchten. Achten Sie darauf, dass sie in die richtige Richtung zeigt.
4.Wählen Sie das Werkzeug Alles automatisch auswählen in der oberen linken Ecke Ihres Bildschirms.
5.Wählen Sie Erledigt.
Sie können Ihren Sender nun simulieren, indem Sie auf
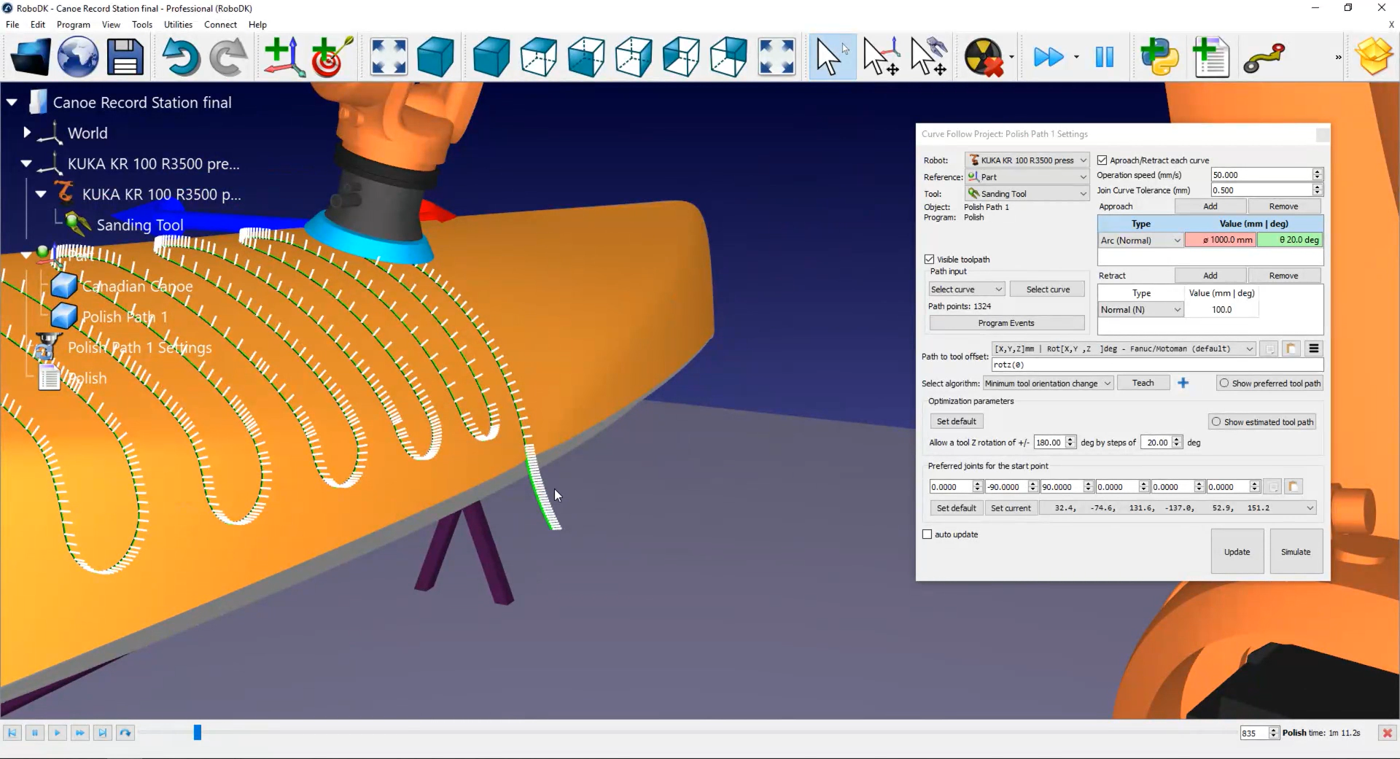
Hinweis: Standardmäßig haben Sie eine Annäherung und einen Rückzug von 100 Millimetern normal zum Pfad. Das bedeutet, dass der Roboter nach unten kommt und seinen Weg beginnt. Sie können aber auch einen "Bogen (normal)" von etwa 20 Grad mit einem Radius von 1 Meter verwenden, indem Sie auf
Sie können auch normale Bewegungen von 200 Millimetern hinzufügen, um eine Kollision zwischen dem Roboter und dem Kanu zu vermeiden. Doppelklicken Sie dazu auf
Sie können die An- und Abfahrgeschwindigkeit ändern, indem Sie
In diesem Menü können Sie auch die Option Abrundung festlegen aktivieren. Standardmäßig ist jede weiße Linie entlang Ihres Pfades ein Punkt, der an die Robotersteuerung als Punkt gesendet wird, an dem der Roboter anhalten muss. Bei einer Polier- oder Schleifanwendung ist dies nicht die beste Vorgehensweise.
Aktivieren Sie das Kontrollkästchen Abrundung einstellen, um die Option "Kontinuierliche Bewegung" in Ihrer Steuerung zu aktivieren. Je nach Robotermarke kann der Name dieser Option "Rundung", "konstante Bewegung" oder "Zonendaten" lauten. In diesem Beispiel wird der Wert 0,5mm sein.
Da wir in diesem Beispiel einen KUKA Roboter verwenden, erhalten Sie eine SRC-Datei, wenn Sie das Roboterprogramm erstellen. Diese Datei kann von einer KUKA KRC-Steuerung gelesen werden.
Folgen Sie diesen Schritten, um ein Roboterprogramm zu erstellen:
1.Klicken Sie mit der rechten Maustaste auf
2.Wählen Sie OK.
3.Klicken Sie mit der rechten Maustaste auf