Ausrichten von Roboter Bezugssystemen
In diesem Abschnitt wird erläutert, wie zwei oder mehrere Roboter offline programmiert werden können, während ein gemeinsamer Referenzrahmen verwendet wird.
In der typischen Offline-Programmieranwendung wird die Position eines Objekts in Bezug auf den Roboter aktualisiert. Wenn jedoch zwei oder mehrere Roboter für dieselbe Anwendung verwendet werden, muss die Position jedes einzelnen Roboters in Bezug auf eine gemeinsame Referenz aktualisiert werden (ein Referenzobjekt oder ein gemeinsames Bezugssystem können hierzu verwendet werden)
Befolgen Sie diese Schritte, um die Position von zwei oder mehr Robotern in Relation zu einem Bezugssystem zu aktualisieren:
1.Stellen Sie sicher, dass die Roboter-Bezugssysteme und das Objekt-Bezugssystem nicht voneinander abhängen. Wenn es eine Abhängigkeit gibt, sollten die Bezugssysteme an das Stationsobjekt geknüpft werden.
2.Fügen Sie ein neues Bezugssystem zu jedem Roboterbasis Bezugssystem hinzu, als wollten Sie ein neues individuelles Bezugssystem für jeden Roboter erstellen. (Real Ref. A und Real Ref. B)
Dieses Bezugssystem stellt die reale Position des Teils bezogen auf jeden Roboter dar.
3.Kalibrieren Sie jedes dieser Bezugssysteme (Real Ref. A und Real Ref. B) für sich, indem sie die Standard Methode der Bezugskalibrierungverwenden (beispielsweise die 3 Punkte Methode)
Nun sollten Sie 3 Bezugssysteme sehen, die übereinstimmen sollten, dies aber nicht tun. Das Bezugssystem jedes Roboters muss aktualisiert werden, um dieses Problem zu beheben:
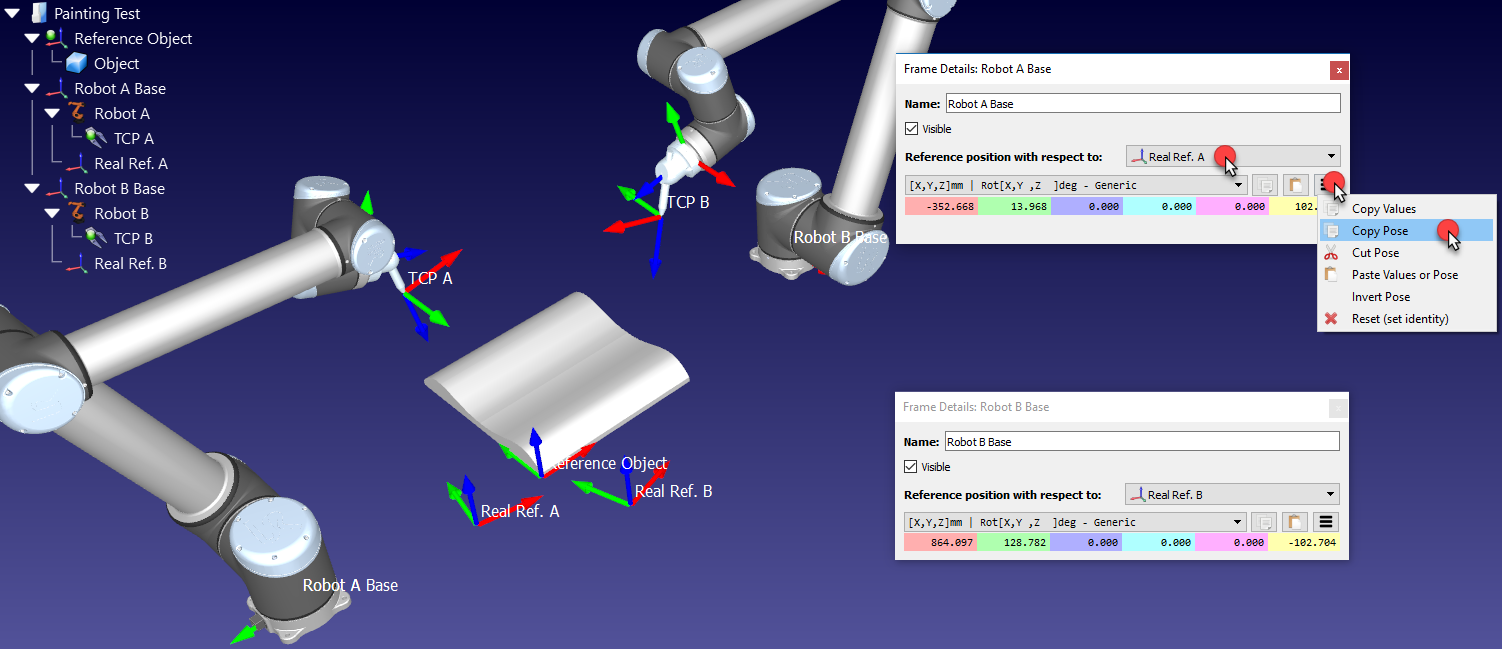
4.Doppelklicken Sie auf eines der Roboterbezugssysteme, z. B. Roboter A Basis, um den Bezugssystem Dialogfenster zu öffnen.
5.Kopieren Sie die Position des Roboter Bezugssystems in Relation zum kalibrierten Bezugssystem dieses Roboters (Real Ref. A), indem Sie die Kopiertaste auswählen.
6.Ändern Sie im selben Fenster die Referenzposition in Bezug auf (Dropdown) zum Referenzobjekt.
7.Fügen Sie die kopierte Position ein. Der Roboter wird bewegt und die Real Ref. A wird mit dem Referenzobjekt Bezugssystem übereinstimmen.
8.Wiederholen Sie Schritte 4-7 für weitere Roboter, falls diese vorhanden sind.
Am Ende dieser Prozedur sollten sämtliche Bezugssysteme übereinstimmen und die Beziehung zwischen allen kalibrierten Referenzen und dem Referenzobjekt sollte identisch sein.