Der Roboter Tool-Center-Point (kurz TCP) ist der Punkt, der für die Roboterpositionierung in jedem beliebigen Roboterprogramm verwendet wird, welches Ziele umfasst, die im kartesischen Raum definiert sind. Der TCP ist als eine Transformation vom Roboterflansch definiert. Die Definition des richtigen TCP ist in jeder Roboteranwendung wichtig, egal ob es offline programmiert wird oder auch nicht.
Folgen Sie diesen Schritten um ein Roboter Werkzeug, also den TCP, zu kalibrieren:
1.Wählen Sie Werkzeuge➔ Definieren des Werkzeug Systems (TCP)
2.Wählen Sie anschließend das zu kalibrierende Werkzeug. Alternativ können Sie auf ein Werkzeug rechtsklicken und Definieren des TCP auswählen.
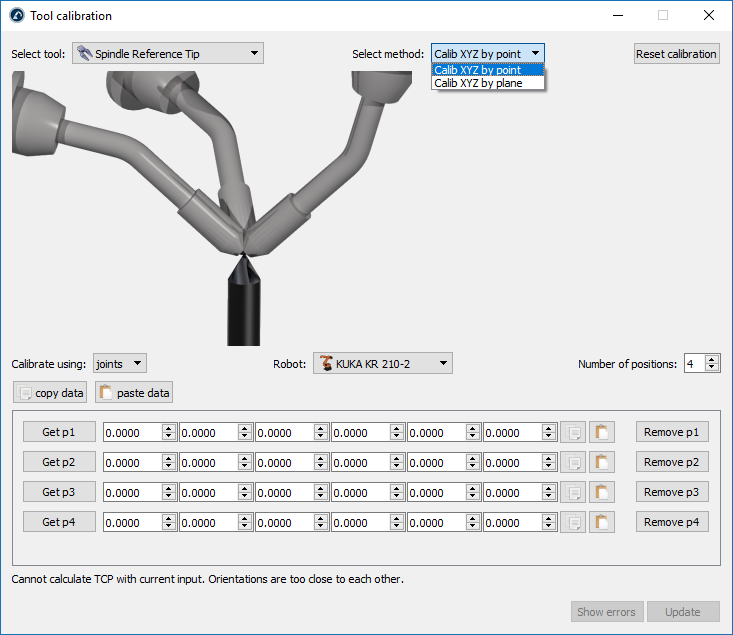
3.Wählen Sie die gewünschte Methode:
a.Berühren eines Punkts mit der Spitze des TCP unter Verwendung verschiedener Werkzeugausrichtungen (Kalibrieren von XYZ mittels Punkt)
b.Berühren einer Ebene mit dem TCP unter Verwendung verschiedener Werkzeugausrichtungen (Kalibrieren von XYZ mittels Ebene). Der TCP kann ein Punkt oder eine Kugel sein.
Anmerkung: Das Berühren ein und desselben Punkts mit unterschiedlichen Orientierungen (erste Methode) ist die gleiche Methode, welche die meisten Robotersteuerungen auf dem Programmierhandgerät verwenden. Benutzen Sie RoboDK, um eine bessere Vorstellung von den TCP-Fehlern zu erhalten.
Anmerkung: Wenn der Mittelpunkt einer Kugel berechnet werden muss, wird empfohlen, eine Ebene zum Kalibrieren des TCP zu verwenden. Diese Methode ruft automatisch die Mitte der Berührungsuntersuchung ab.
4.Die TCP-Kalibrierung mit Gelenkwinkeln ist die Standardeinstellung. Ändern Sie es in Posen, wenn Sie kartesische Ziele verwenden.
Wichtig: Wenn der TCP unter Verwendung von Posen kalibriert wird, muss die Position des Roboterflansches als eine Pose (Position und Orientierung) in Bezug auf die Roboterbasis oder ein Bezugssystem bereitgestellt werden. Weitere Informationen zur Bereitstellung dieser Werte finden Sie im Abschnitt Bezugssysteme.
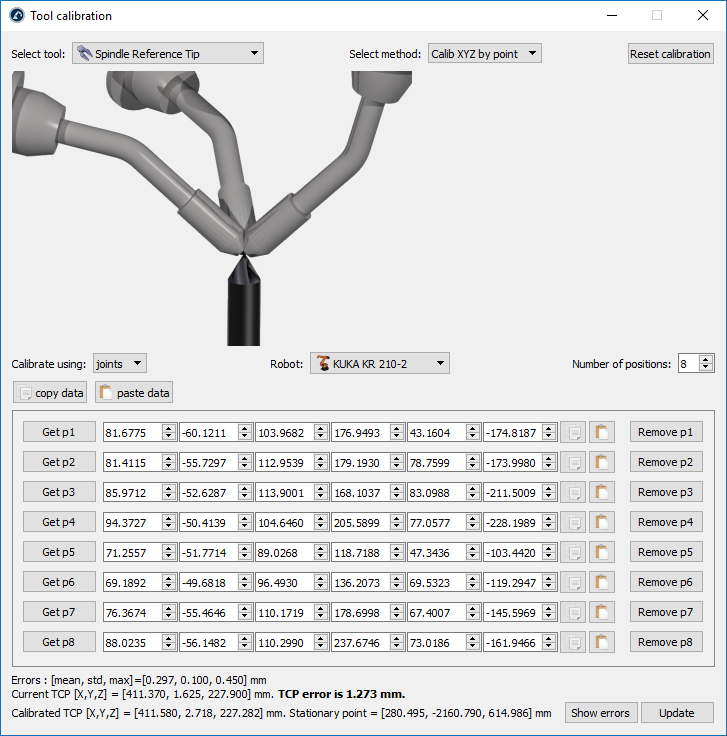
Tipp: Es können mehr als 3 oder 4 Konfigurationen zur Kalibrierung des TCP‘s verwendet werden. Dies ermöglicht es, ein genaueres Ergebnis zu erhalten und liefert eine gute Schätzung des TCP-Fehlers. Es wird empfohlen, 8 Punkte oder mehr zu verwenden, um einen TCP exakt zu definieren. 3 Punkte sind ausreichend, wenn die Genauigkeit nicht wichtig ist.
5.Wählen Sie einen Roboter aus, wenn mehr als ein Roboter verfügbar ist.
6.Passen Sie die Anzahl der Punkte an, die Sie zum Kalibrieren des TCP verwenden möchten. Dieser Wert kann auch später geändert werden.
7.Füllen Sie die Tabelle mit den gemessenen Konfigurationen (Gelenkwinkel oder Position und Ausrichtung des Flansches).
Tipp: Die Konfigurationsliste kann manuell oder über die Schaltflächen Kopieren / Einfügen (rechts von jeder Zeile) ausgefüllt werden.
Wichtig: Es wird empfohlen, jeden Gelenkwinkel mit mindestens 4 Dezimalstellen anzugeben (wenn Sie Gelenkwinkel verwenden). Die zulässige Anzahl von Dezimalwerten kann unter Extras ➔Optionen➔Genauigkeit➔Max Dezimalstellen geändert werden.
Tipp: Es ist ebenso möglich, Erhalte p1 auszuwählen, um die aktuellen Gelenkwinkel vom realen Roboter in RoboDK zu erhalten. Wenn der Robotertreiber richtig eingerichtet wurde, können Sie diese Position einfach auf den PC übertragen. Weitere Informationen finden Sie im Abschnitt "Robotertreiber".
Wichtig: Es wird empfohlen, eine separate Kopie der bereitgestellten Werte abzuspeichern. Wählen Sie Daten kopieren und Daten einfügen aus, um den gesamten Inhalt zu kopieren und einzufügen.
8.Wählen Sie schließlich Aktualisieren, um den TCP in der RoboDK-Station zu aktualisieren. Der TCP-Fehler wird auf 0 mm aktualisiert.
Anmerkung: Der kalibrierte TCP wird automatisch berechnet, sobald die Werte von Ihnen eingegeben wurden.
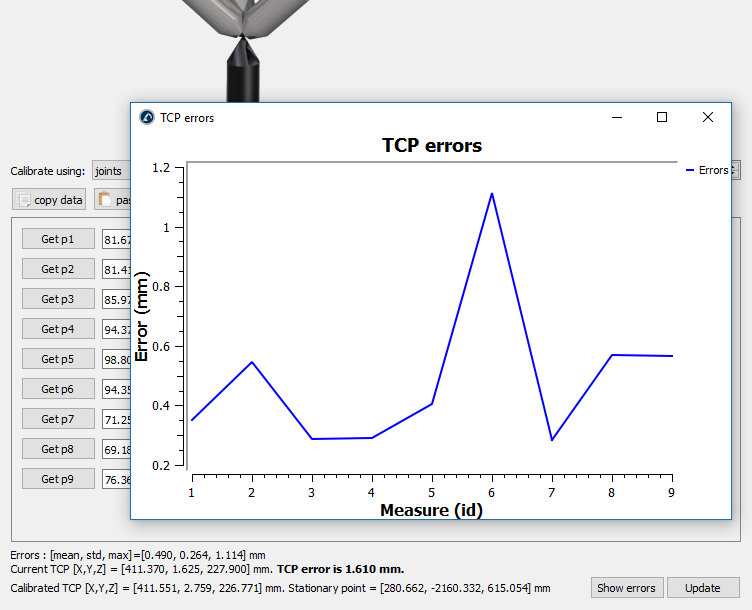
Tipp: Einige nützliche Fehlerstatistiken werden Ihnen als der mittlere Fehler, die Standardabweichung (std) und der maximale Fehler bereitgestellt. Wählen Sie Fehler anzeigen aus, um eine Grafik mit den Fehlern eines jeden Punkts gegenüber dem berechneten Durchschnittswert anzuzeigen. Da dieses Verfahren viele manuelle Operationen erfordert, ist es üblich, Fehler in bestimmten Punkten einzuführen. Um diese Fehler zu isolieren, können wir iterativ die Punkte löschen, die im Vergleich zum Durchschnitt einen größeren Fehler aufweisen.
Als Beispiel zeigt das folgende Bild die Fehler, bevor Punkt 6 gelöscht wurde, indem Sie die Schaltfläche Lösche p6 auswählen.