Objekt an Bezugssystem ausrichten
In diesem Abschnitt wird erläutert, wie das Bezugssystem eines Objekts in Bezug auf seine eigene Geometrie ausgerichtet werden kann. Dieser Abschnitt ermöglicht das Ersetzen des Bezugssystems eines Objekts durch eine Position, welche in einem realen Setup identifiziert werden kann.
Folgen Sie diesen Schritten, um das Bezugssystem eines Objekts an bestimmten Punkten der Geometrie eines Objekts virtuell auszurichten:
1.Laden Sie das Objekt
2.Wählen Sie die aktive 
3.Wählen Sie Programm➔
Stellen Sie hierbei sicher, dass das Bezugssystem direkt an die Station und nicht an andere Bezugssystem angeheftet ist.
4.Klicken Sie mit einem Rechtsklick auf das Bezugssystem und wählen Sie 
Dieses Vorgehen ist sehr ähnlich zu dem im vorherigen Abschnitt beschriebenen. Der wesentliche Unterschied liegt darin, dass wir Punkte auf dem virtuellen Objekt, anstatt auf dem realen Objekt anwählen müssen.
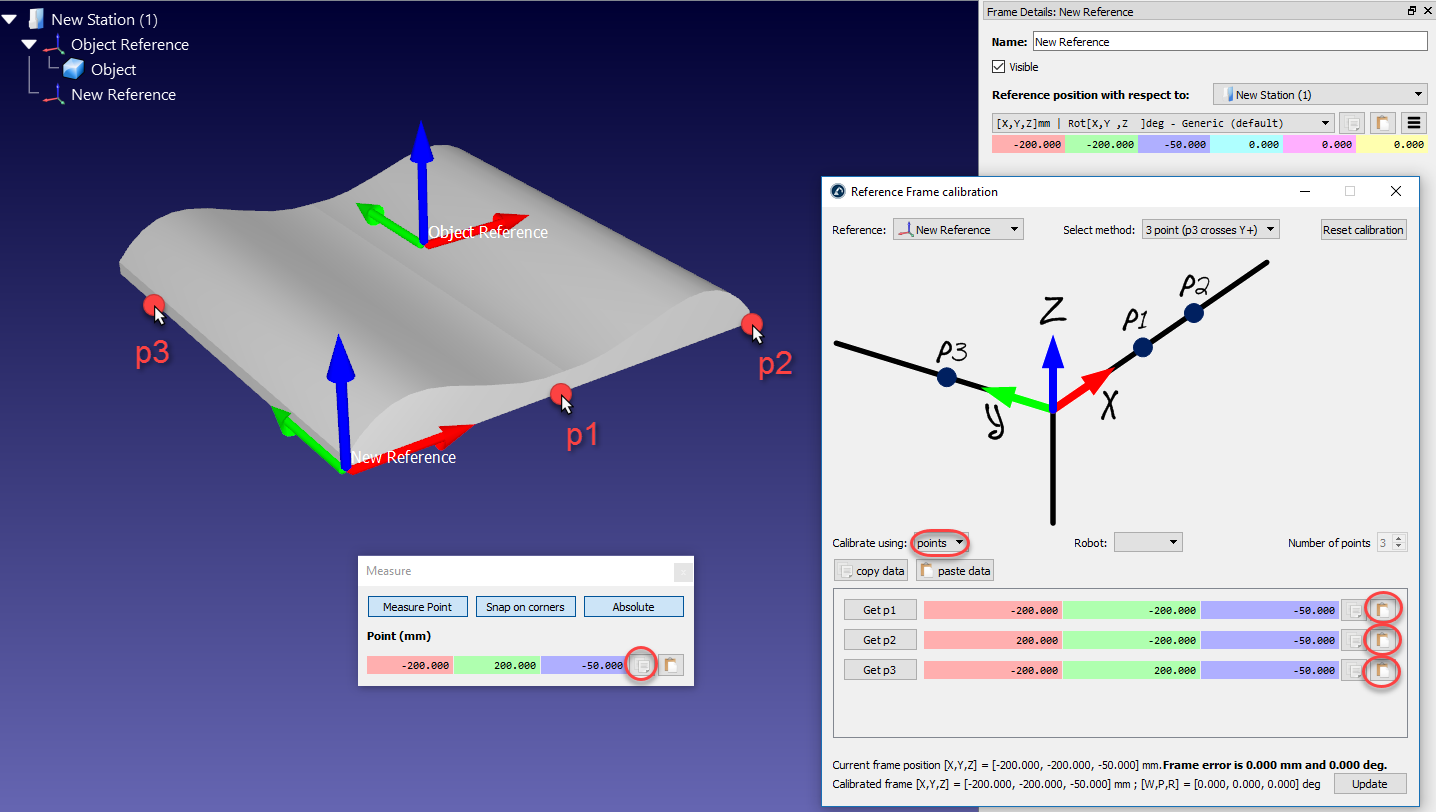
5.Wählen Sie die gewünschte Kalbrierungsmethode.
Zum Beispiel: Die 3-Punkte Methode bei welcher der 3. Punkt auf der Y+ Achse liegt.
6.Wählen Sie Kalibrierung mittels Punkte
7.Wählen Sie Extras➔Messen um ein Messwerkzeug zu verwenden.
8.Wählen Sie die Schaltfläche Absolut im Messwerkzeug, um die Punkte in Bezug zur Station (Absoluter Abstand) zu messen.
9.Wählen Sie drei Punkte auf dem virtuellen Objekt (einen nach dem anderen) und geben Sie diese in das Kalibrierungsfenster des Bezugssystems ein.
10.Wählen Sie Aktualisieren. Das Bezugssystem erscheint dadurch in der gewünschten Position.
11.Klicken Sie mit der rechten Maustaste auf das Objekt und wählen Sie Support ändern aus. Wählen Sie anschließend das neue Bezugssystem aus. Die absolute Position des Objekts ändert sich nicht. Die relative Position des Objekts bezüglich des neuen Bezugssystem wird jedoch korrekt definiert.
12.Das Objekt und das zugehörige Bezugssystem sind bereit zur Offline Programmierung. Mittels Drag And Drop können Sie das neue Bezugssystem in das Roboter Bezugssystem ziehen.